

1.2. Интегрирование дифференциального уравнения изогнутой оси балки
Чтобы получить аналитические выражения прогибов и углов поворота сечений, необходимо найти решение дифференциального уравнения (1.5).
Интегрируя его первый раз, получим
![]() . (1.6)
. (1.6)
Это выражение определяет закон изменения углов поворота сечений (касательной) по длине балки. Уравнение изогнутой оси получим после повторного интегрирования
![]() . (1.7)
. (1.7)
Для вычисления интегралов в выражениях (1.6) и (1.7), необходимо сначала написать аналитические выражения изгибающего момента и жёсткости. Постоянные интегрирования СиDнаходятся из граничных условий, которые зависят от способа закрепления балки.
Для уяснения сказанного рассмотрим примеры:
Определим прогибы и углы поворота сечений балки, показанной на рис.1.1. Считаем жёсткость балки постоянной: EJ = const. Запишем уравнение изгибающего момента
M = – MA + RA ∙ x = – Pℓ + Px. (a)
Дифференциальное уравнение
![]() . (б)
. (б)
Интегрируя один раз, получим
![]() . (в)
. (в)
Интегрируя ещё раз, имеем
![]() . (г)
. (г)
Так как в заделке прогиб и угол поворота равны нулю, то для определения постоянных имеем следующие граничные условия:
при х = 0
 ;
;при х = 0υ = 0.
Из уравнений (в) и (г) получим C = D = 0.
Очевидно, что наибольший прогиб имеет место под силой (см.рис.1.1). Подставив х = ℓв уравнение (г), найдём
![]() .
.
Знак «–» говорит о том, что перемещение происходит вниз (в отрицательном направлении оси υ).
Определим прогибы и углы поворота сечений двухопорной балки постоянного сечения, нагруженной равномерно распределённой нагрузкой (рис.1.3).

Рис.1.3
![]() .
.
![]() .
.
Так как EJ = const,
![]() ;
;
![]() . (д)
. (д)
![]() . (е)
. (е)
На опорах прогиб равен нулю, граничные условия:
при х = 0υ = 0;
при х = ℓυ = 0.
Из первого условия
следует, что D
= 0, из второго
условия:
![]() .Следовательно,
.Следовательно,![]() .
.
Найденные значения СиDподставим в уравнения (д) и (е) и получим готовые к употреблению уравнения углов поворота сечений и прогибов:
![]() ,
,
![]() .
.
Из рис.1.3 видно, что наибольший по величине угол поворота сечения имеет место на опоре при х = 0:
![]() ;
;
а наибольший прогиб в середине пролёта при х = ℓ/2:
![]() ,
,
![]() .
.
Из рассмотренных примеров очевидно, что постоянные интегрирования С и D имеют физический смысл: С – угол поворота сечения в начале координат (уравнения (в) и (д)); D – прогиб в начале координат (уравнения (г) и (е))
С = EJθ0 , D = EJυ0 .(1.8)
В наших примерах балки имели по одному участку. В случае произвольной нагрузки необходимо составить несколько дифференциальных уравнений, каждое из которых отвечает своему участку. Число постоянных равно удвоенному числу участков. Граничные условия приведут к системе уравнений, число которых равно числу постоянных интегрирования. Однако необходимость решения системы уравнений сильно усложняет задачу. Для балок постоянной жёсткости (EJ = const) была предложена такая форма представления решения дифференциального уравнения, которая обеспечивает равенство постоянных интегрирования на границах участков. При любом числе участков – две постоянных (1.8).
1.3. Уравнение изогнутой оси по методу начальных параметров
Балка с одним участком
В уравнениях изогнутой оси (г) и (е), полученных в примерах предыдущего параграфа, каждая из нагрузок – сосредоточенная Р и распределённая q – умножаются на свой множитель х3/6 (х3/3!) и х4/24 (х4/4!) соответственно. Ясно, что сосредоточенный момент М после двойного интегрирования должен умножаться на х2/2 (х2/2!). Удобно записывать функции υ и θ в стандартном виде – по методу начальных параметров, выражая их через перемещения и нагрузки в начале координат.
Для балки с равномерно распределённой нагрузкой q = q0и сосредоточенными усилиямиМ0иQ0(рис.1.4) уравнение изогнутой оси имеет вид:
![]() . (1.9)
. (1.9)
Уравнение углов поворота сечения получается дифференцированием (1.9):
![]() . (1.10)
. (1.10)

Рис.1.4
Направления нагрузок М0, Q0иq0приняты такими, чтобы изгибающий момент в произвольном сечении на расстояниихот начала координат получился положительным. Поэтому в формулах (1.9) и (1.10) стоят знаки «+». Начальные параметрыEJυ0иEJθ0могут быть найдены из граничных условий:
при х = ℓ υ = 0;
при х = ℓ θ = 0.
Ещё раз подчёркиваем, что в такой форме уравнения могут быть записаны для балок постоянной жёсткости (EJ = const).
Балка с несколькими участками (с произвольной нагрузкой)
Рассмотрим сначала балки с двумя участками: на расстоянии х = с от начала координат приложен сосредоточенный момент М (рис.1.5, а), сосредоточенная сила Р (рис.1.5,б), начинается распределённая нагрузка q (рис.1.5,в). В точке х = с имеет место скачок в одной из производных функции υ (см. п.1.1):
![]() ;
;![]() ;
;![]() .
.
а б в

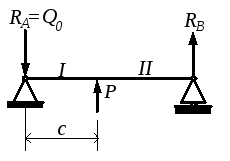

Рис.1.5
Очевидно, что при наличии скачка в любой производной ординаты упругой линии получают две ветви с различными аналитическими выражениями в связи с тем, что уравнения изгибающего момента для каждого участка различны. Для балок на рис.1.5 покажем изогнутую ось (рис.1.6).

Рис.1.6
Уравнение для первого участка может быть записано по формуле (1.9)
![]() . (а)
. (а)
По этому уравнению построим упругую линию. На первом участке она изображена жирной линией, на втором – пунктирной. Пунктирная линия не совпадает с истинной кривой изогнутой оси на втором участке, которая проведена жирной линией. Не останавливаясь на доказательстве, запишем условие сопряжения ветвей упругой линии:
![]() . (1.11)
. (1.11)
где Nn– скачок вn–й производной.
В соответствии с формулой (1.11) уравнения изогнутой оси для балок на рис.8.5 будут следующими:
![]() ; (а)
; (а)
![]() ; (б)
; (б)
![]() . (в)
. (в)
Слагаемые, расположенные левее знака |I,IIотносятся к первому и ко второму участкам балки; а слагаемое, расположенное левее знака|II, относится только ко второму участку. Ясно, что если участков много, то для каждого последующего записывается свой «довесок» с соответствующим множителем(х – сi ).Начальные параметры – перемещенияEJυ0иEJθ0– находятся из граничных условий. Для балок на рис.8.5 они следующие:
при х = 0υ = 0;
при х = ℓυ = 0.
Из первого условия следует, что EJυ0 = 0. Из второго условия можно найти EJθ0 (на шарнирной опоре угол поворота нулю не равен – см.рис.1.6).
Итак, уравнение изогнутой оси по методу начальных параметров имеет следующий вид
 (1.12)
(1.12)
где М0, Q0иq0– усилия в начале координат;
Мi, Qiиqi– усилия в произвольном месте балки;
ci– координата приложения сосредоточенных усилий или координата начала распределённой нагрузки.
Уравнение углов поворота сечений получается дифференцированным (1.12):
![]() . (1.13)
. (1.13)
При выводе уравнений (1.12) и (1.13) считали, что распределённая нагрузка действует от точки х = с до конца балки. Если такая нагрузка действует на участке отх = с1до х = с2, то её можно рассматривать как результат наложения двух нагрузок, показанных на рис.1.7. В уравнения обязательно добавляются слагаемые, учитывающие действие компенсирующей нагрузки.

Рис.1.7
Рассмотрим пример. На рис.1.8 изображена балка с произвольной нагрузкой, имеющая четыре участка. Запишем для неё уравнение изогнутой оси, приняв начало координат на левом конце


Рис.1.8
Начальные параметры здесь не равны нулю и могут быть найдены из граничных условий:
при х = 2υ = 0;
при х = 8υ = 0.
Придётся решить систему уравнений

Разграничительные линии показывают, какие слагаемые формулы необходимо учитывать при записи граничных условий или при подсчёте перемещения в какой-либо точке балки. Учитываются только те слагаемые, у которых множитель (x – ci )> 0.