

3.3 Расчет угловой характеристики для синхронного генератора, имеющего регулятор тока возбуждения пропорционального вида.
При наличии у синхронного генератора АРВ ПД его угловая характеристика зависит от двух переменных: угла δ и поперечной синхронной ЭДС Eq.





Te – постоянная времени возбуждения возбудителя принимается равной 0,2 с.






Результаты расчета ЭДС СГ и его угловая характеристика представлены на рисунках 8 и 9 соответственно.
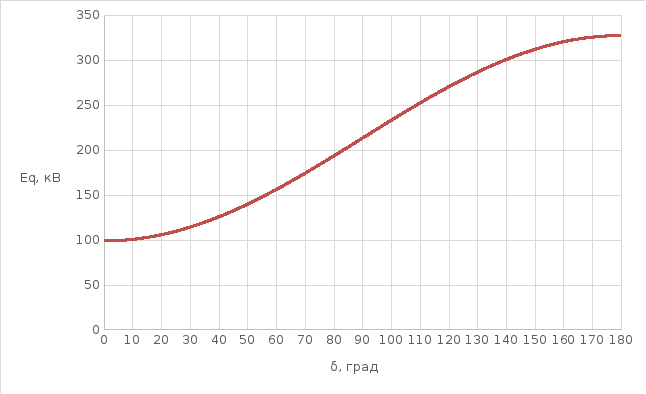
Рисунок8 –
Зависимость ЭДС от угла


Рисунок9 – Угловая характеристика СМ
Согласно рисунку 9, можно найти значения максимальной мощности СГ и соответствующий ему угол:
PEqmax=9787,77 МВт, δпред=112,40

4.Анализ устойчивости динамических переходов
4.1 Анализ устойчивости динамических переходов без учета демпфирования
Последовательный анализ режимов работы энергосистемы.
Нормальный режим



Аварийный режим. Двухфазное короткое замыкание в начале ЛЭП длительностью t=0.34 с
Сопротивление обратной последовательности:




Первый послеаварийный режим. Отключение поврежденной ЛЭП t = 0.16c



Второй послеаварийный режим. Неуспешное АПВ поврежденной цепи после которого линия включается на КЗ t=0.15


Динамический переход представлени на рисунке 10.

Рисунок10 – Угловые характеристики



Предположим, что характеристика после аварийного режима переходит только на после аварийный режим, тогда можно определить предельно допустимый угол отключения:



Численное интегрирование уравнения движения ротора с использованием метода последовательных интервалов
Для метода последовательно интегрирования используются следующие данные и формулы:
Примем ∆t
= 0,02c,
δ0
=
 ,
τj
= 4,88 с
,
τj
= 4,88 с






Результаты интегрирования сведены в таблицу 4 и представлены на рисунках 11-13.

Рисунок11 – Зависимость угла от времени ПП
Таблица 3 – Данные интегрирования
|
интервал |
t,с |
∆P,МВт |
∆δ,град |
δ,град |
∆W,1/с |
W,1/с |
|
0 |
0 |
0 |
0 |
23.05 |
0 |
314 |
|
1 |
0.02 |
1561.750 |
0.958 |
24.008 |
0.836 |
314.836 |
|
2 |
0.04 |
1528.929 |
1.896 |
25.904 |
1.654 |
316.489 |
|
3 |
0.06 |
1464.704 |
2.794 |
28.698 |
2.437 |
318.926 |
|
4 |
0.08 |
1371.926 |
3.636 |
32.334 |
3.171 |
322.097 |
|
5 |
0.1 |
1254.895 |
4.405 |
36.739 |
3.842 |
325.940 |
|
6 |
0.12 |
1119.301 |
5.092 |
41.831 |
4.441 |
330.381 |
|
7 |
0.14 |
972.043 |
5.688 |
47.519 |
4.961 |
335.342 |
|
8 |
0.16 |
820.907 |
6.192 |
53.711 |
5.401 |
340.743 |
|
9 |
0.18 |
674.096 |
6.605 |
60.316 |
5.761 |
346.504 |
|
10 |
0.2 |
539.695 |
6.936 |
67.252 |
6.050 |
352.554 |
|
11 |
0.22 |
425.142 |
7.197 |
74.449 |
6.277 |
358.831 |
|
12 |
0.24 |
336.827 |
7.404 |
81.853 |
6.458 |
365.289 |
|
13 |
0.26 |
279.876 |
7.575 |
89.428 |
6.607 |
371.896 |
|
14 |
0.28 |
258.161 |
7.734 |
97.161 |
6.745 |
378.642 |
|
15 |
0.3 |
274.517 |
7.902 |
105.063 |
6.892 |
385.534 |
|
16 |
0.32 |
331.121 |
8.105 |
113.169 |
7.069 |
392.603 |
|
17 |
0.34 |
-1180.507 |
7.381 |
120.550 |
6.438 |
399.041 |
|
18 |
0.36 |
-2463.532 |
5.870 |
126.419 |
5.120 |
404.161 |
|
19 |
0.38 |
-2145.352 |
4.554 |
130.973 |
3.972 |
408.133 |
|
20 |
0.4 |
-1865.510 |
3.410 |
134.383 |
2.974 |
411.107 |
|
21 |
0.42 |
-1638.265 |
2.405 |
136.788 |
2.098 |
413.205 |
|
22 |
0.44 |
-1469.351 |
1.504 |
138.292 |
1.311 |
414.516 |
|
23 |
0.46 |
-1360.261 |
0.669 |
138.961 |
0.584 |
415.100 |
|
24 |
0.48 |
-1310.868 |
-0.135 |
138.826 |
-0.118 |
414.983 |
|
25 |
0.5 |
-166.495 |
-0.237 |
138.589 |
-0.207 |
414.776 |
|
26 |
0.52 |
981.223 |
0.365 |
138.954 |
0.318 |
415.094 |
|
27 |
0.54 |
991.468 |
0.973 |
139.927 |
0.849 |
415.943 |
|
28 |
0.56 |
1019.062 |
1.598 |
141.525 |
1.394 |
417.337 |
|
29 |
0.58 |
1065.241 |
2.252 |
143.777 |
1.964 |
419.301 |
|
30 |
0.6 |
1132.052 |
2.946 |
146.723 |
2.569 |
421.870 |
Продолжение таблицы 3
|
31 |
0.62 |
1222.404 |
3.696 |
150.419 |
3.223 |
425.094 |
|
32 |
0.64 |
1340.120 |
4.518 |
154.936 |
3.940 |
429.034 |
|
33 |
0.66 |
1489.950 |
5.432 |
160.368 |
4.738 |
433.772 |
|
34 |
0.68 |
1677.483 |
6.461 |
166.828 |
5.635 |
439.407 |
|
35 |
0.7 |
1908.838 |
7.631 |
174.460 |
6.656 |
446.063 |
|
36 |
0.72 |
2189.915 |
8.975 |
183.434 |
7.828 |
453.891 |
|
37 |
0.74 |
2524.846 |
10.523 |
193.958 |
9.179 |
463.069 |
|
38 |
0.76 |
2913.085 |
12.310 |
206.268 |
10.737 |
473.807 |
|
39 |
0.78 |
3344.456 |
14.362 |
220.629 |
12.526 |
486.333 |
|
40 |
0.8 |
3791.591 |
16.687 |
237.317 |
14.555 |
500.888 |
|
41 |
0.82 |
4200.386 |
19.264 |
256.580 |
16.802 |
517.690 |
|
42 |
0.84 |
4482.344 |
22.013 |
278.593 |
19.200 |
536.890 |
|
43 |
0.86 |
4518.702 |
24.785 |
303.378 |
21.618 |
558.508 |
|
44 |
0.88 |
4191.830 |
27.356 |
330.733 |
23.860 |
582.368 |
|
45 |
0.9 |
3452.611 |
29.474 |
360.207 |
25.707 |
608.076 |
|
46 |
0.92 |
2399.087 |
30.945 |
391.152 |
26.991 |
635.067 |
|
47 |
0.94 |
1298.288 |
31.741 |
422.894 |
27.686 |
662.752 |
|
48 |
0.96 |
496.972 |
32.046 |
454.940 |
27.951 |
690.704 |
|
49 |
0.98 |
265.267 |
32.209 |
487.149 |
28.093 |
718.797 |
|
50 |
1 |
687.144 |
32.630 |
519.779 |
28.461 |
747.258 |
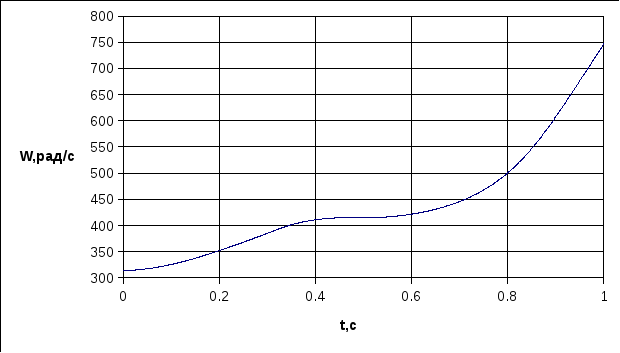
Рисунок12 – Зависимость скорости от времени

Рисунок 13 – Зависимость изменения скорости от угла
Расчет площадок торможения и ускорения:
Площадка ускорения находится в интервале от δ0 = 23,050до δ1 = 120,60 и ограничена характеристиками Р0 и РАР.

Площадка торможения находится в интервале от δ1 = 120,60 до δ2 = 138,60 и ограниченная характеристиками Р0 и РПАР1.

Площадка ускорения в ПАР находится в интервале от δ2 = 138,60до δ3 = 160,40 и ограничена характеристиками Р0 и РАР.
 следовательно,
динамический переход неустойчив.
следовательно,
динамический переход неустойчив.
Площадки торможения и ускорения представлены на рисунке 14.

Рисунок 14 – площадки ускорения и торможения