

Введение
Системы автоматического управления находят широкое применение в различных отраслях промышленности, сельского хозяйства, и повседневной жизни человека. Немаловажную роль занимают среди них телемеханические системы, предназначенные для контроля промышленных процессов. К подобным системам относятся системы телеизмерения, при помощи которых можно наблюдать за различными процессами, находящимися на значительном расстоянии от наблюдателя.
В общем случае системой телеизмерения называется совокупность телеизмерительных устройств на передающей и приемной сторонах и канала связи для автоматического измерения одного или ряда параметров на расстоянии.
В связи со сравнительно высоким уровнем помех канала связи, а также из-за затухания сигнала в процессе передаче осуществляется согласование сигнала, получаемого с первичного преобразователя, с каналом связи путем кодирования и модуляции на передающем устройстве.
Все устройства и системы телеизмерения подразделяются на аналоговые, в которых возможные значения измеряемого параметра представляет собой бесконечное множество и цифровые, значения измеряемого параметра в которых представлено в виде дискретной величины.
Чтобы защитить передаваемую информацию от помех в телеметрических системах используют различного рода модуляции и кодирования.
В курсовом проекте осуществлена реализация основных способов и методов построения современной, высоконадежной, быстродействующей системы сбора и передачи цифровой телеметрической информации.
Курсовой проект состоит из восьми разделов. В первом разделе описывается область применения и описывается технологический процесс. Во втором разделе проекта осуществляется выбор структуры проектируемой системы, канала связи и структуры сигналов. Третий посвящен разработке общего алгоритма функционирования системы. В четвертом разделе на основании этого алгоритма разрабатывается структурная схема системы. В пятом разделе выбирается элементарная база и проектируются электрические схемы. В шестом выполняются расчеты временных и частотных параметров, а также линии связи. В седьмом – системные расчеты. В девятом выполняется разработка программного обеспечения.
1 Область применения системы и описание
ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
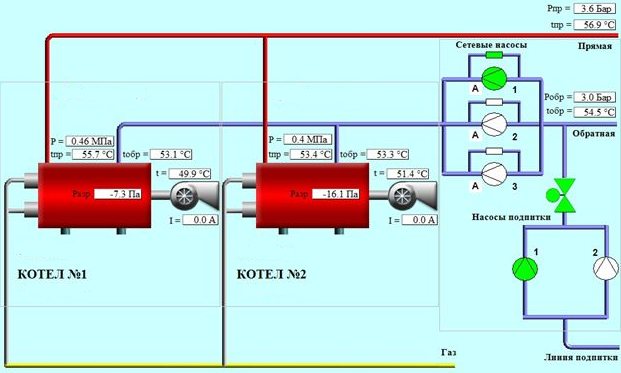
В разрабатываемом курсовом проекте выполняется телемеханизация котельных. Система состоит и трех котельных по два котла в каждой. Технологическая схема приведена на рисунке 1.1. Холодная вода поступает из обратной линии и линии подпитки. Необходимое давление формируют сетевые насосы. Поступающая вода нагревается котлами и передается в прямую линию.
 Рисунок
1.1- Технологическая схема котельной
Рисунок
1.1- Технологическая схема котельной
В системе контролируются следующие параметры:
-Давление в прямом и обратно канале
-температура обратного и прямого канала, на входе всей системе, и каждого котла в отдельности
-Давление в котле
Выходной сигнал всех датчиков 0…5мА.
2 Структура системы
2.1 Выбор структуры системы
В соответствии с техническим заданием, спроектируем следующую структурную схему системы телеизмерения. Структура данной системы будет приведена на рисунке 2.1. Данная система будет состоять из пункта управления и 3 контролируемых пунктов. На пункте управления будет осуществляется опрос и прием телеизмерений от КП, полученные измерения фиксируются принтером. Передача данных будет осуществляться с помощью модема. Устройства КП опрашивают датчики измерений и формируют посылки согласно заданному алгоритму.
Рисунок 2.1- Структурная схема системы телеизмерений.
2.2 Выбор линии связи
Системы телемеханики разделяются по характеру расположения объектов в пространстве на системы для сосредоточенных и рассредоточенных объектов. Объекты могут быть рассредоточены вдоль общей линии связи, по площади или в пространстве. Для сосредоточенных объектов характерно то, что сам оператор и объекты управления расположены в двух раздельных пунктах: пункте управления (ПУ) и контролируемом пункте (КП) и соединены в единую систему управления с помощью аппаратуры телемеханики и канала связи.
Для системы с рассредоточенными объектами управления подключается, по меньшей мере, несколько КП. Все данные системы сводят к четырем основным видам: однолучевая (линейная), радиальная, радиально-узловая, древовидная.
Расстояние между КП меньше, чем между каждым КП и ПУ, поэтому целесообразно использовать однолучевую линию связи. Характерной особенностью однолучевой системы является то, что контролируемые пункты расположены последовательно друг за другом, образуя однонаправленную цепочку, что упрощает процедуру опроса контролируемых пунктов. Структура однолучевой линии связи приведена на рисунке 1.2 .
Рисунок 2.2- Однолучевая структура линии связи.
2.3 Выбор структуры сигналов
В проектируемой системе используются два вида сигналов. Первый – это запрос со стороны ПУ на КП. Его структура изображена на рисунке 1.3.
Рисунок 2.3-Структура сигнала посылаемого с ПУ на КП.
В его состав входят:
-СК – синхрокод, состоит из восьми единиц;
-АКП – адрес опрашиваемого контролируемого пункта;
Второй вид сигналов – это посылки со стороны КП на ПУ. Сокращение количества информации в проектируемой системе происходит за счет рационального построения телеметрического кадра. Данное устройство позволяет передать код параметра и коды адресов тех датчиков, сигналы которых в данный момент равны между собой с погрешностью, определяемой квантованием сигнала по уровню, в одном телеметрическом кадре. Структура сигнала, передаваемого с КП на ПУ, изображена на рисунке 2.4.
Рисунок 2.4-Структура сигнала посылаемого с КП на ПУ.
В состав сигнала входят:
-КВ- квитанция;
-КП- код параметра для группы датчиков с одинаковыми измерениями;
-АД1-АДn; АД1-АДk; – адреса датчиков с одинаковыми параметрами;
-КСад1-КСадn – контрольные символы для АД1-АДn.
-ККБ – код конца блока группы датчиков с одинаковыми параметрами, принимаем 11111110b
-ККП – код конца посылки принимаем 11111111b
Посылка на ПУ начинается с квитанции КВ, в качестве квитанции принимаем адрес отвечающего КП. Далее идет код параметра группы датчиков с одинаковыми измерениями. После идут контрольные символы для кода параметра. Далее следуют адреса датчиков в группе с одинаковыми параметрами. После каждого адреса датчика идут контрольные символы. В конце каждого блока датчиков идёт код конца блока. Прием данного кода означает, что далее будет идти новый блок или конец посылки. Прием кода конца посылки говорит о, том что принят последний байт со стороны КП.