

58. Условие передачи движения во фрикционном механизме с гибким звеном
Передача движения от ведущего шкива к ведомому будет осуществляться при значении силы трения Fтр между ремнем и ведомым шкивом, равном значению окружного усилия Ft2 , которое связано с моментом сил сопротивления М2, приложенным к выходному валу, выражением
Fтр = Ft2 = 2М2/D2. (13.9)
C учетом ранее полученного выражения (13.4) для окружного усилия следует, что сила трения равна разности натяжений ведущей и ведомой ветвей передачи. Для нахождения выражения силы трения рассмотрим движение гибкой нерастяжимой нити, огибающей неподвижный шкив диаметром D2 с углом обхвата α (рис. 13.6).
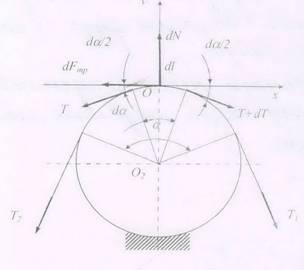
Рис. 13.6
Выделим элементарный участок нити длиной dl, для которого угол обхвата равен dα. На выделенный участок нити действуют силы натяжения Т и Т+dT, сила трения dFтр и сила нормального давления dN со стороны неподвижного шкива. Запишем условия равновесия указанной системы сил, действующей на элементарный участок нити, в проекциях на оси ОХ и ОУ:
ОХ: -Тcos(dα/2) - dFтр + (T + dT)sin(dα/2) = 0; (13.10)
OУ: dN - Tsin(dα/2) - (T + dT)sin(dα/2) = 0. (13.11)
Из уравнения (13.10) с учетом допущения, что cos(dα/2) 1, получим выражение для приращения натяжения нити dT:
dT = dFтр = μ dN, (13.12)
где μ – коэффициент трения нити о шкив.
Из уравнения (13.11), приняв sin(dα/2) dα/2 и dTdα/2 0, получим, что
dN = Т dα. (13.13)
С учетом (13.13) из уравнения (13.12) получим следующую дифференциальную зависимость:
dT/T = μ dα . (13.14)
Проинтегрировав выражение (13.14) в пределах изменения силы натяжения от Т2 до Т1 и угла обхвата от 0 до α при μ = const, получим
ln(T1/T2) = μα, или Т1 = Т2eμα . (13.15)
Выражение (13.15) называется формулой Эйлера, оно позволяет определять силу трения между гибким звеном и шкивом.
С учетом (13.15) и (13.14) выражение (13.9) для силы трения, возникающей в паре шкив – гибкое звено, запишется в виде
Fтр = Т1 - Т2 = Т2(eμα - 1). (13.16)
Момент силы трения относительно оси ведомого шкива диаметром D2 будет определяться выражением
Мтр = Fтр D2/2 = Т2(eμα - 1)D2/2. (13.17)
Передача движения от ведущего шкива к ведомому в механизме с гибким звеном будет происходить при достижении моментом сил трения значения, равного значению момента сил сопротивления, которые приложены к ведомому шкиву. Это значит, что должно выполняться условие
Мтр = Т2(eμα - 1)D2/2 М2. (13.18)
Для обеспечения надежной работы механизма обычно принимают значение момента сил трения в 1,1...1,5 раз больше момента сил сопротивления, приложенного к ведомому шкиву.
59.Назначение,
классификация и конструкции механизмов
прерывистого движенияМеханизмы
прерывистого движения служат для
преобразования вращательного или
колебательного непрерывного движения
ведущего звена во вращательное или
поступательное с периодическими
остановками движения ведомого звена.К
этому классу механизмов относят также
механизмы, обеспечивающие однонаправленное
движение ведомого звена при изменяющемся
по направлению движении ведущего
звена.К механизмам прерывистого движения
относятся мальтийские и храповые
механизмы, передачи с неполными зубчатыми
колесами, кулачковые механизмы и
др.Мальтийские
механизмы. Эти
механизмы применяются для преобразования
обычно равномерного вращательного
движения ведущего звена – кривошипа
1 в периодические повороты с остановками
определенной продолжительности ведомого
звена – креста 2 (рис. 14.1). Коэффициент
полезного действия мальтийских
механизмов составляет 0,75…0,85.Мальтийский
механизм состоит из двух подвижных
звеньев (рис. 14.1): кривошипа 1, на котором
закреплены поводок 3 и замок B в
виде сектора, очерченного окружностью
радиусом r0,
и креста 2, имеющего несколько прорезей
и такое же число замков D,
очерченных радиусом r0.
В связи с подобием ведомого звена
отличительному знаку Мальтийского
ордена крестоносцев – кресту, механизм
получил название мальтийского механизма.В
положении механизма, показанном на
рис. 14.1, крест 2 не может повернуться,
так как этому мешают замки B и D,
соприкасающиеся по окружности радиусомr0.
При дальнейшем вращении звена 1 поводок
3 входит в прорезь креста 2 и в этот же
момент замок B освобождает
крест и начинается вращение последнего.Крест
2 вращается в направлении, противоположном
направлению вращения ведущего звена
1. В момент выхода поводка 3 из прорези
замки B и D входят
в соприкосновение и снова запирают
крест. Крест остается неподвижным до
тех пор, пока поводок не войдет в
следующую прорезь.Отношение времени tдв,
в течение которого крест движется, ко
времени одного оборота ведущего звена
1 называется коэффициентом
движения τ мальтийского
механизма. При равномерном вращении
ведущего звена отношение времен
можно заменить отношением углов
поворота:τ=![]() φдв –
угол поворота ведущего звена 1,
соответствующий движению ведомого
звена 2.
φдв –
угол поворота ведущего звена 1,
соответствующий движению ведомого
звена 2.
Значение
коэффициента движения τ зависит
от числа прорезей креста и
количества поводков на ведущем звене.
 Рис.
14.1На рис. 14.1 показан одноповодковый мальтийский
механизм с внешним зацеплением.
Конструктивно возможно выполнение
мальтийского механизма с внутренним
зацеплением. В таком механизме
ведущее и ведомое звено будут вращаться
в одном направлении.Механизмы с
мальтийским крестом работают плавно,
почти без ударов в начале и конце
поворота ведомого звена и применяются
при средних и малых угловых скоростях
ведущего звена. Исключение жесткого
удара при входе в зацепление ведущего
и ведомого звеньев механизма достигается
за счет того, что вектор скорости центра
поводка (точки А)
в момент его входа в прорезь направлен
вдоль оси прорези.Храповые
механизмы. Храповые
механизмы используются для преобразования
колебательного движения ведущего звена
во вращательное или поступательное
движение с остановками ведомого звена.
Кроме этого, они применяются как
механизмы, препятствующие движению
ведомых звеньев в одном направлении и
допускающие свободное движение их в
противоположном направлении.Храповые
механизмы используются в шаговых
искателях, реле времени, часовых
механизмах, самопишущих и других
приборах различного назначения.По
конструкции и принципу работы храповые
механизмы делятся на следующие виды:–
зубчатые механизмы с внешним (рис.
14.2,а),
торцевым (рис. 14.2,б)
и внутренним зацеплением;– фрикционные с
шариками или роликами (рис.
14.2,в);– фрикционные с
эксцентриками (рис. 14.2,г).В зубчатом
храповом механизме,
представленном на рис. 14.2,а,
ведущее звено 1, называемое собачкой,
совершает колебательное движение и
поочередно входит в зацепление с зубьями
ведомого (храпового) колеса 2, обеспечивая
ему одностороннее прерывистое движение.
Угол поворота φ2 храпового
колеса за один период движения собачки
(рабочий угол) определяется
выражением
Рис.
14.1На рис. 14.1 показан одноповодковый мальтийский
механизм с внешним зацеплением.
Конструктивно возможно выполнение
мальтийского механизма с внутренним
зацеплением. В таком механизме
ведущее и ведомое звено будут вращаться
в одном направлении.Механизмы с
мальтийским крестом работают плавно,
почти без ударов в начале и конце
поворота ведомого звена и применяются
при средних и малых угловых скоростях
ведущего звена. Исключение жесткого
удара при входе в зацепление ведущего
и ведомого звеньев механизма достигается
за счет того, что вектор скорости центра
поводка (точки А)
в момент его входа в прорезь направлен
вдоль оси прорези.Храповые
механизмы. Храповые
механизмы используются для преобразования
колебательного движения ведущего звена
во вращательное или поступательное
движение с остановками ведомого звена.
Кроме этого, они применяются как
механизмы, препятствующие движению
ведомых звеньев в одном направлении и
допускающие свободное движение их в
противоположном направлении.Храповые
механизмы используются в шаговых
искателях, реле времени, часовых
механизмах, самопишущих и других
приборах различного назначения.По
конструкции и принципу работы храповые
механизмы делятся на следующие виды:–
зубчатые механизмы с внешним (рис.
14.2,а),
торцевым (рис. 14.2,б)
и внутренним зацеплением;– фрикционные с
шариками или роликами (рис.
14.2,в);– фрикционные с
эксцентриками (рис. 14.2,г).В зубчатом
храповом механизме,
представленном на рис. 14.2,а,
ведущее звено 1, называемое собачкой,
совершает колебательное движение и
поочередно входит в зацепление с зубьями
ведомого (храпового) колеса 2, обеспечивая
ему одностороннее прерывистое движение.
Угол поворота φ2 храпового
колеса за один период движения собачки
(рабочий угол) определяется
выражением![]() гдеz2 –
число зубьев храпового колеса; zр – число
зубьев, которые проходит собачка при
обратном (холостом) ходе, т.е. расположенных
в пределах рабочего угла. Если собачка
входит в зацепление с каждым зубом, то
тогда zр =
1.
гдеz2 –
число зубьев храпового колеса; zр – число
зубьев, которые проходит собачка при
обратном (холостом) ходе, т.е. расположенных
в пределах рабочего угла. Если собачка
входит в зацепление с каждым зубом, то
тогда zр =
1.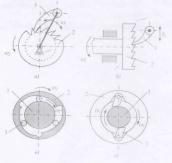 Рис.
14.2
Рис.
14.2
В момент входа собачки в зацепление с зубом храпового колеса возникают ударные нагрузки, величина которых зависит от скорости движения собачки. Поэтому для избегания больших ударных нагрузок зубчатые храповые механизмы применят при малых скоростях.Во фрикционных храповых механизмах (рис. 14.2,в,г) передача движения от ведущего звена 1 к ведомому 2 происходит за счет сил трения, возникающих между звеньями и промежуточным звеном 3. В качестве промежуточного звена могут использоваться ролики (рис. 14.2,в) или эксцентрики (рис. 14.2,г). Эти механизмы обеспечивают передачу движения только в одном направлении.В механизме, показанном на рис. 14.2,в, ролики 3 находятся в сужающихся зазорах между ведущим 1 и ведомым 2 звеньями. При вращении ведущего звена в направлении, указанном на рисунке стрелкой, ролики за счет сил трения перемещаются в зазоре до тех пор, пока размер зазора не станет равным размеру диаметра ролика. В этом случае произойдет заклинивание ролика в зазоре между поверхностями ведущего и ведомого звеньев и ведомое звено начнет вращаться в том же направлении, что и ведущее. При изменении направления вращения ведущего звена ролики за счет сил трения перемещаются в ту часть зазора, где его размер больше размера диаметра ролика, и движение от ведущего звена к ведомому не передается.В механизме на рис. 14.2,г промежуточное звено 3 – эксцентрик – имеет рабочую поверхность, точки которой находятся на разном удалении от оси, закрепленной на ведомом звене 2. При вращении ведущего звена 1 в направлении, указанном на рисунке, эксцентрики за счет сил трения поворачиваются относительно своих осей до тех пор, пока расстояние между осью и поверхностью эксцентрика не станет равным расстоянию между осью и поверхностью ведущего звена. В этом случае происходит заклинивание эксцентриков и передача движения ведомому звену 2. При изменении направления вращения ведущего звена эксцентрики поворачиваются в обратном направлении, что исключает их заклинивание, и движение к ведомому звену не передается.
Фрикционные храповые механизмы могут применяться при средних и больших угловых скоростях ведущего звена, так как в них за счет скольжения смягчаются толчки при включении и выключении ведомого звена.
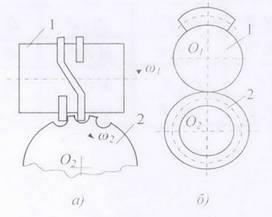 Рис.
14.3Кулачковые
механизмы прерывистого движения (рис.
14.3,а) применяются
при скрещивающихся осях валов и работают
почти без ударов, что позволяет их
использовать при средних и высоких
скоростях вращения звеньев. За один
оборот кулачка 1 ведомый диск 2
поворачивается на угол, соответствующий
одному шагу. Соотношение времени
движения и времени остановки диска
зависит от формы профиля кулачка.
Рис.
14.3Кулачковые
механизмы прерывистого движения (рис.
14.3,а) применяются
при скрещивающихся осях валов и работают
почти без ударов, что позволяет их
использовать при средних и высоких
скоростях вращения звеньев. За один
оборот кулачка 1 ведомый диск 2
поворачивается на угол, соответствующий
одному шагу. Соотношение времени
движения и времени остановки диска
зависит от формы профиля кулачка.
Механизмы с неполными зубчатыми колесами состоят из ведущего звена – зубчатого сектора 1 – и ведомого зубчатого колеса 2 (рис. 14.3,б). Эти механизмы работают с толчками и ударами в начале и конце поворота ведомого звена, поэтому используются только при малых угловых скоростях ведущего звена. Применяются в счетчиках цифровых приборов, в устройствах прерывистого перемещения, в ограничителях движения и др.Коэффициент движения , определяемый как отношение времени движения ведомого звена ко времени полного оборота ведущего звена, для механизма с неполными зубчатыми колесами можно определить через отношение числа зубьев сектора zс ведущего колеса к числу зубьев полного колеса z1: τ = zс / z1. (14.3)Как видно из (14.3), коэффициент движения для механизмов с неполными зубчатыми колесами может изменяться в широком диапазоне значений.