

Продольно – строгальный станок compact

Рисунок 24 - Продольно-строгальный станок COMPACT XL
Продольно-строгальный станок COMPACT XL предназначен для обработки деталей методом строгания плоских и фасонных (горизонтальных, вертикальных и наклонных) поверхностей, прорезания пазов и канавок, а также для обработки поверхностей методом долбления при установке сменной долбежной головки взамен строгальной. Станки имеют механический привод ползуна, совершающего возвратно-поступательные движения при мощи кулисного механизма. Продольно-строгальный станок COMPACT P оснащен трехпозиционным столом, позволяющим обрабатывать поверхности деталей при выполнении обычных строгальных работ(первая позиция стола), поверхности с уклонами, типа клиньев, в поперечном и продольном направлениях(вторая позиция) с использованием наклоняемого стола. В третьей позиции предусматривается круглый стол, предназначенный для долбления шпоночных или шлицевых пазов, квадратных и других форм отверстий, а также для строгания на цилиндрических наружных поверхностях различных скосов, пазов в деталях, закрепленных в трехкулачковом патроне или непосредственно на поворотном столе.Трехпозиционный стол продольно-строгального станка COMPACT XL может перемещаться по трем координатам (вертикально, горизонтально и вокруг собственной оси) для установления нужной позиции. Подача и перемещения стола в горизонтальном и вертикальном направлениях совершаются в автоматическом, ускоренном или в ручном режимах. Вертикальные перемещения суппорт с резцовой головкой могут осуществляться в ручную или при помощи механизма вертикальной подачи.

Рисунок 25 – Рабочая зона станка COMPACT XL
Технические характеристики:
|
ширина обрабатываемого материала, мин-макс, мм |
25-230 |
|
высота обрабатываемого материала, мин-макс, мм |
6-120 |
|
скорость подачи, м/мин |
6-12 |
|
потребляемая мощность двигателя: подачи, л.с.(кВт) фуговального узла, л.с.(кВт) вертикальных шпинделей, л.с.(кВт) верх, и ниж. гориз. шпинделей, л.с.(кВт) универсального шпинделя, л.с.(кВт) |
1,3/1,7(1/1,3) 5,5(4) 7,5(5,5) 5,5(4) 5,5(4) |
|
частота вращения шпинделей, об/мин |
60 |
|
диаметр шпинделей режущих инструментов, мм |
40 |
|
полезная длина вертикальных шпинделей, мм |
140 |
|
полезная длина горизонтальных шпинделей, мм |
250 |
|
мин./макс. диаметр режущего инструмента - фуговального узла, мм - верт. игориз. шпинделей, мм - гориз.верхнего шпинделя, мм |
120/140 125/165 125 |
|
высота профиля, мм |
20 |
|
диаметр подающих роликов, мм |
140 |
|
длина рабочей поверхности на входе, мм |
2000 |
|
быстрая регулировка поверхности и направляющей на входе, мм |
10 120 |
|
диаметр подающих вальцов, мм | |
|
габарит станка, мм |
3170 х 2055 х 2070 |
Сварочный робот vr – 32

Рисунок 26 - Сварочный робот VR– 32
Промышленные робот Panasonic VR-032 серии предназначен для шовной, дуговой и плазменной сварки и плазменной резки. Высокая и плавная скорость перемещения с возможностью быстрого ускорения и замедления обеспечивается сервоприводной технологией. Робот имеет шесть осей, каждая из которых снабжена системой быстрой остановки. Система защиты роботов от внешних воздействий IP54, как дополнительная опция возможно IP65.
Управление осуществляется контроллером Panasonic с 64-х разрядным процессором, контролем до 27 осей и возможностью запоминания 20 000 точек в 20 000 последовательностей управляющих программ. Контроллер имеет цифровой интерфейс для подключения сварочных источников и имеет возможность подключения во внутреннюю сеть Ethernet. Панель управления, с которой осуществляется программирование контроллера, имеет эргономичный дизайн и Windows интерфейс. 7 дюймовый TFT-LCD дисплей, Jog-Dial и графический пользовательский интерфейс, а также система меню делают работу по управлению роботом приятной и легкой. К панели управления может подключаться внешняя клавиатура, мышь, а также PCMCIA и IrDA устройства.
Технические характеристики:
|
Величины наклона и вращения осей, град. |
Механическая рука |
Вращение |
Вокруг оси |
+ -155 | |||
|
Плечо |
Вертикально |
+ 150 ~-100 + 265 ~ -180 | |||||
|
Предплечье |
Горизонтально | ||||||
|
Относительно плеча |
+ 210 ~- 65 | ||||||
|
Механическое запястье |
Вращение |
Стандартная установка |
+ 270 | ||||
|
Подвесная установка |
+ 450- -90 | ||||||
|
Сгибание |
Фронтальная ось |
+ 90 ~ - 150 | |||||
|
|
Поворот |
+ 400 | |||||
|
Рабочая зона манипулятора |
В горизонтальной плоскости, кв.м х град. |
Точка Р |
7.11 х310 | ||||
|
Точка О |
5.55x310. | ||||||
|
Максимальная скорость движения осей, град/с |
Механическая рука |
Вращение |
140 | ||||
|
Плечо |
120 | ||||||
|
Предплечье |
140 | ||||||
|
Механическое запястье |
Вращение |
250 | |||||
|
Сгибание |
225 | ||||||
|
Поворот |
300 | ||||||
|
Максимальная грузоподъемность, кг |
32 | ||||||
|
Точность позиционирования не хуже, мм |
+_0.15 | ||||||
|
Система остановки осей |
Все оси | ||||||
|
Степень защиты |
IP54 (IP65) | ||||||
|
Положение манипулятора при установке |
Пол/потоло к | ||||||
|
Вес манипулятора, кг |
580 | ||||||
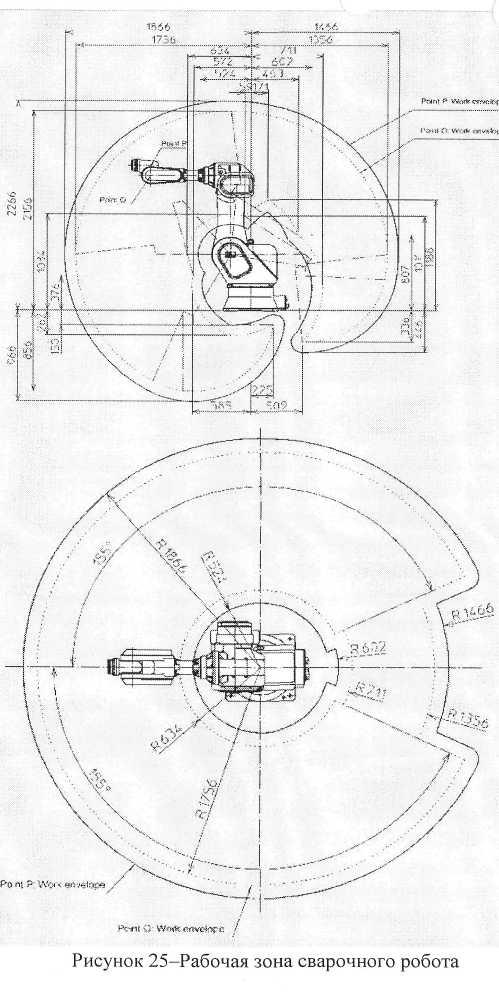
Рисунок 27 – Рабочая зона сварочного робота VR– 32