

4.2 Расчёт оптимальных настроек регулятора уровня
Для расчёта настроек регулятора необходимо построить приведённую передаточную функцию системы, которая представляет собой последовательное соединение фиксатора и передаточной функции непрерывной части. Используется фиксатор нулевого порядка с передаточной функцией вида (формула 5).
|
|
((5) |

Период дискретизации выбирается согласно теореме Котельникова, которая гласит, что аналоговая непрерывная функция, переданная в виде последовательности её дискретных по времени значений может быть точно восстановлена, если период дискретизации в два раза меньше, чем период самой высокой гармоники спектра исходной функции. Использование меньшего периода дискретизации не сделает работу САР более точной, но приведёт к избыточному использованию вычислительной мощности ПЛК.
В соответствии с теоремой Котельникова выбирается период дискретизации, равный 7.5с. Передаточная функция фиксатора нулевого порядка принимает вид:
|
|
((6) |

Поиск оптимальных настроек регулятора можно проводить несколькими методами. В этой работе используется метод ограничения на частотный показатель колебательности М. Допустимое значение М находится с помощью номограмм Солодовникова.
Так как допустимое перерегулирование σ=15%, то в соответствии с номограммами Солодовникова берётся M=1,05. Тогда параметры окружности равны:
|
|
((7) |

По
методу ограничения на частотный
показатель колебательности на одной
комплексной плоскости строятся окружность
с параметрами, зависящими от частотного
показателя колебательности, и АФЧХ
системы с регулятором. Для различных
значений времени интегрирования
регулятора
 выбираются значения коэффициентов
передачи регулятора
выбираются значения коэффициентов
передачи регулятора ,
при которых окружность и АФЧХ касаются,
но не пересекаются. Из всех полученных
пар настроек регуляторов за оптимальные
принимаются настройки с максимальным
соотношением коэффициента передачи и
времени регулирования (формула 8).
,
при которых окружность и АФЧХ касаются,
но не пересекаются. Из всех полученных
пар настроек регуляторов за оптимальные
принимаются настройки с максимальным
соотношением коэффициента передачи и
времени регулирования (формула 8).
|
|
((8) |

Значения
времени интегрирования выбираются из
диапазона
 .
.
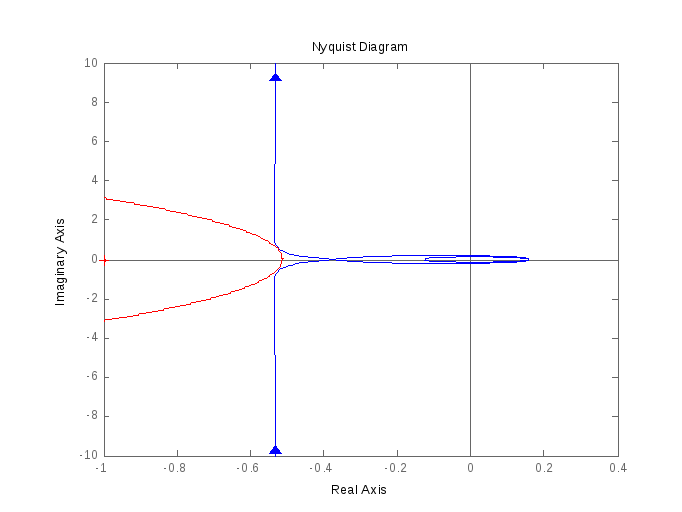
Рисунок 4.2 – АФЧХ системы и окружность на комплексной плоскости
Подставляем каждое значение времени интегрирования и получаем соответствующие им значения коэффициентов передачи регуляторов.
Таблица 4.1 – Настройки ПИ-регуляторов
|
Ти |
Kr |
Kr/Ти |
|
12,5 |
0,129 |
0,01032 |
|
15 |
0,165 |
0,01100 |
|
17,5 |
0,21 |
0,01200 |
|
20 |
0,265 |
0,01325 |
|
22,5 |
0,31 |
0,01377 |
|
25 |
0,345 |
0,01380 |
|
27,5 |
0,37 |
0,01345 |
|
30 |
0,39 |
0,01300 |
|
32,5 |
0,405 |
0,01246 |
|
35 |
0,419 |
0,01197 |
|
37,5 |
0,429 |
0,01144 |
На рисунке 4.3 изображена зависимость Kr/Ти от Ти.
Kr/Ти
Ти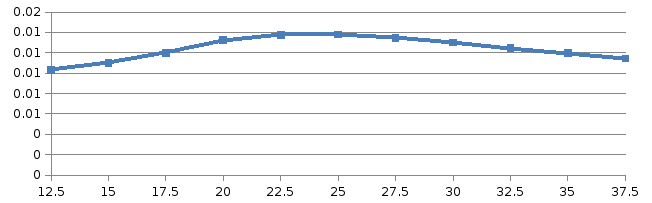
Рисунок 4.3 – график зависимости Kr/Ти от Ти.
За
оптимальные принимаются настройки
ПИ-регулятора


Найденные настройки проверяются на обеспечение качества регулирования. Для этого вычисляется передаточная функция замкнутой системы. В случае с единичной обратной связью она имеет вид (формула 9).
|
|
(9) |
 ;
;  .
.Фактический показатель колебательности находится по АЧХ, построенной с помощью MatLab, и сравнивается с заданным значением D = Kr/Tи.
АЧХ системы с регулятором имеет вид (рисунок 4.4):
ω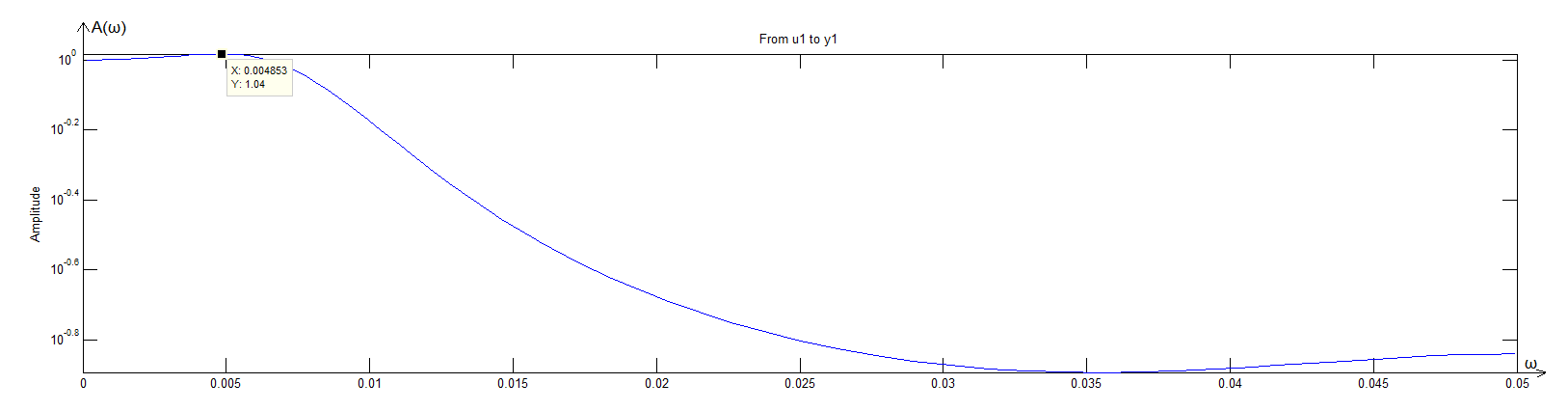
Рисунок 4.4 – АЧХ системы с ПИ-регулятором
 ,
расчёт удовлетворительный.
,
расчёт удовлетворительный.
Для определения прямых показателей качества в MatLabстроится переходная характеристика системы с ПИ-регулятором (рисунок 4.5).
t,
c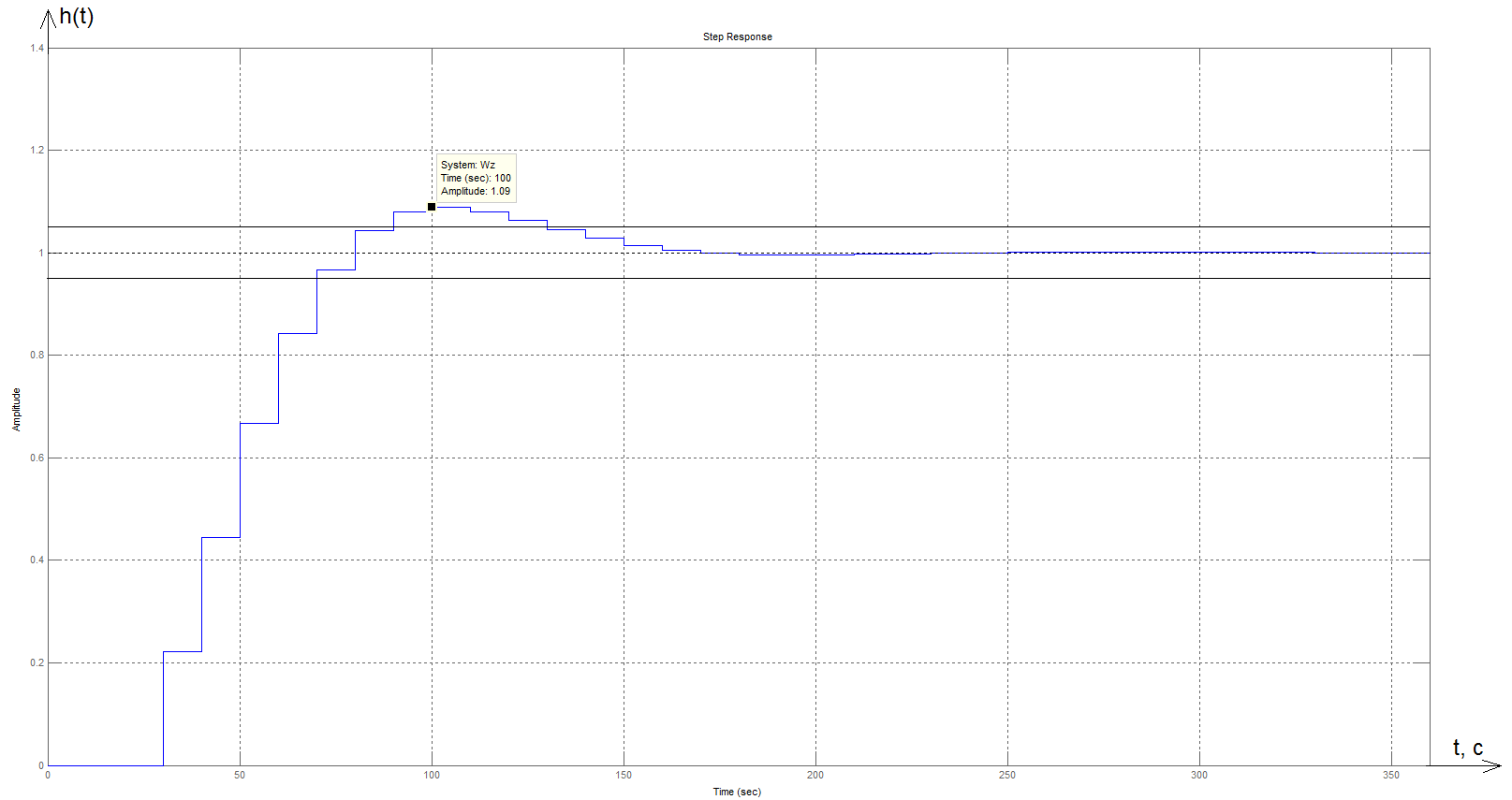
Рисунок 4.5 – Переходная характеристика системы с ПИ-регулятором
Находим значение перерегулирования:
Перерегулированием σ - называется максимальное отклонение регулируемой величины от ее установившегося значения, выраженное в процентах.
(10)
 .
.
По графику переходного процесса определяем:
hmax=1.09;h(∞)=1;
σ = .
.
Задавшись
ошибкой Δ=0.05 (для технических расчётов
достаточно) определяем время регулирования.
Система устойчива и имеет прямые
показатели качества управления


 показатели качества управления
удовлетворительные. В качестве
оптимального принимается ПИ-регулятор
с параметрами
показатели качества управления
удовлетворительные. В качестве
оптимального принимается ПИ-регулятор
с параметрами
