

3.2 Выбор проектной конфигурации контроллера
Согласно перечню сигналов, контроллер должен обрабатывать следующее количество сигналов (с учетом резерва):
входные аналоговые (AI) – 77, резерв – 11;
входные дискретные (DI) – 78, резерв – 18;
выходные дискретные (DO) – 56, резерв – 8.
Для этого необходима следующая конфигурация контроллера:
процессор SLC 5/04 с ёмкостью памяти 28К слов и дополнительными 4К для данных (каталожный номер 1747-L542);
одно шасси, 1шт. на 13 слотов (1746-А13);
три модуля ввода дискретных сигналов, 3шт.1746-IB32;
два модуля вывода дискретных сигналов, 2шт.1746-OB32;
шесть модулей ввода аналоговых сигналов 5шт.1746-NI16 и 1шт. 1746-NI8;
один источник питания 1746-Р2.
Расчет энергопотребления контроллера представлен в таблице 3.2
Таблица 3.2 – Расчет энергопотребления контроллера
|
№ шасси |
№ слота |
Каталожный номер |
Потребляемый ток от шасси, mA |
Описание | ||
|
5В |
12В | |||||
|
1746-А13 |
0 |
1747-L542 |
1000 |
200 |
5/04 CPU | |
|
1 |
1746-NI16 |
125 |
75 |
Аналоговый вход | ||
|
2 |
1746-NI16 |
125 |
75 | |||
|
3 |
1746-NI16 |
125 |
75 | |||
|
1746-А13 |
4 |
1746-NI16 |
125 |
75 | ||
|
5 |
1746-NI16 |
125 |
75 | |||
|
6 |
1746-NI8 |
200 |
100 | |||
|
7 |
1746-OB32 |
452 |
- |
Дискретный выход | ||
|
8 |
1746-OB32 |
452 |
- | |||
|
9 |
1746-IB32 |
106 |
- |
Дискретный вход | ||
|
10 |
1746-IB32 |
106 |
- | |||
|
11 |
1746-IB32 |
106 |
- | |||
|
12 |
- |
- |
- |
Резерв | ||
|
|
Итого |
I,A |
3047 |
675 |
Блок питания | |
|
БП |
I,A |
5000 |
960 | |||
|
Запас |
I,A |
1953 |
285 | |||
Необходимым условием при выборе источника питания является то, что его мощность должна быть больше мощности, потребляемой всеми модулями и процессором.
Выбранный источник питания – 1746 - Р2.
Характеристики блока питания:
напряжение – 85-132/170-265 VАС, 47-63Гц;
потребляемая мощность – 180 ВА;
допустимая нагрузка – 5А для 5В, 0.96А для 24В.
Расчет системы регулирования уровня в сепараторе с-1
4.1 Определение параметров модели объекта и выбор типа регулятора
Качество работы современных автоматизированных систем управления промышленными технологическими процессами в значительной степени зависит от того, насколько правильно выбраны настройки регуляторов, входящих в состав этих систем. Проблеме правильного выбора настроек регуляторов усугубляется еще и тем, что в процессе эксплуатации автоматической системы параметры объекта управления изменяются, и для обеспечения соответствия между этими параметрами и настраиваемыми параметрами регуляторов требуется их перенастройка. Решением проблемы может быть использование регуляторов с автоматической, в определенном смысле, оптимальной настройкой их параметров.
В данной работе производится расчёт САР сепаратора первой ступени сепарации (С-1) для системы регулирования уровня нефти при ступенчатом изменении регулирующего органа.
Исходные данные для выполнения расчёта:
- величина относительного изменения выходного параметра μ=3%;
- допустимое перерегулирование σ=15%;
- кривая разгонной характеристики сепаратора приведена на рисунке 4.1
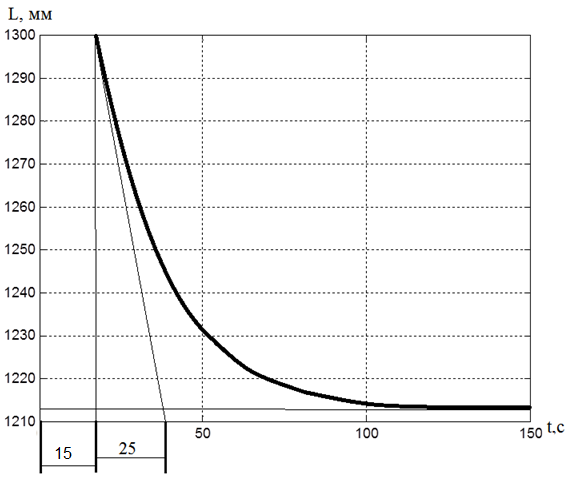
Рисунок 4.1 – Определение динамических характеристик С-1
t,
с Запаздывание τ и постоянную
времени Т0определяют по графику
переходного процесса.
Запаздывание τ и постоянную
времени Т0определяют по графику
переходного процесса.
|
|
((1) |

Динамические характеристики объекта находятся методом касательной. Для этого строится касательная в точке максимального наклона кривой разгонной характеристики. Постоянные времени объекта определяются графически.
По данной переходной характеристике объекта можно определить параметры объекта регулирования (время запаздывания опостоянную времени объекта То, передаточный коэффициент Ко).
Для этого проводим касательную к кривой до пересечения с установившимся значением выходной величины и определяем постоянную времени объекта То.
Время запаздывания определяется из графика как разница времени от пересечения касательной с начальным значением переходной характеристики и момента начала открытия регулирующего клапана.


Коэффициент передачи объекта находится по формуле 2.
|
|
((2) |

Тогда передаточную функцию объекта регулирования запишем в виде:
|
|
((3) |

Для выбора типа регулятора сравниваются динамические характеристики объекта регулирования. Главным критерием является соотношение запаздывания и постоянной времени объекта (формула 4).
|
|
((4) |

Для данного значения критерия предпочтительно использовать пропорционально-интегральный регулятор.