

Федеральное агентство по образованию РФ
Государственное образовательное учреждение
высшего профессионального образования
«Тульский государственный университет»
Кафедра «Системы автоматического управления»
Отчет по лабораторной работе №6
по курсу «Статистическая динамика»
Оптимизация испытаний оптической системы сопровождения цели
Выполнил: ст. гр. 140181б
Меденцева М.Ю.
Руководитель: доцент, к.т.н.
Воробьев В.В.
Тула 2012
Цель исследования – практическое знакомство с методами оптимизации динамических испытаний оптической системы сопровождения цели (ОССЦ).
Достижение поставленной цели связано с необходимостью решения следующих задач:
- оптимизация динамические испытания ОССЦ на заданном классе входных сигналов по минимаксному критерию точности;
- формирование испытательных тест-сигналов;
- построение виртуального стенда для динамических испытаний;
- испытания системы с оценкой предельной динамической ошибки.
Технологический
процесс статистических испытаний ОССЦ
предусматривает вначале подачу на вход
ЗУ детерминированного
тест-сигнала
![]() и регистрацию
максимальной динамической ошибки.
Программы испытаний ОССЦ расширяется
за счет
использования стохастического
тест-сигнала, который формируется на
базе сигнала
и регистрацию
максимальной динамической ошибки.
Программы испытаний ОССЦ расширяется
за счет
использования стохастического
тест-сигнала, который формируется на
базе сигнала
![]() .
Необходимость в случайном тест-сигнале
при испытаниях обусловлена тем, что МО
ОССЦ, используемое для формирования
сигнала
.
Необходимость в случайном тест-сигнале
при испытаниях обусловлена тем, что МО
ОССЦ, используемое для формирования
сигнала
![]() ,
является линеаризованным и неполным.
,
является линеаризованным и неполным.
Первая разновидность стохастического тест-сигнала имеет релейную форму с длительностями интервалов постоянства (интервалов между моментами переключения реле), которые образуют последовательность независимых случайных величин. Вторая разновидность стохастического тест-сигнала имеет типовую форму – это, так называемый, «типовой входной случайный сигнал СС» с широкой полосой частот.
Рассмотрим виртуальные статистические испытания ОССЦ в пакете Simulink системы Matlab. Универсальное программное обеспечение испытаний включает типовые Simulink-схемы:
1) задающего устройства;
2) расчета ГТ;
3) моделирования детерминированного и стохастического тест-сигналов;
4) виртуального испытательного стенда.
В состав обеспечения также входят пользовательские программы (m-файлы), выполняющие функции:
1) формирования
тест-сигнала
![]() ;
;
2) расчета
среднего значение интервала постоянства
сигнала
![]() ;
;
3) формирования стохастического тест-сигнала релейной формы;
4) формирования «типового входного случайного сигнала СС».
Задающее
устройство в виде колебательного звена
при подаче на его вход широкополосного
«типового входного случайного сигнала
СС» формирует класс
![]() (случайный процесс)
сигналов с заданной спектральной
плотностью на входе ОССЦ (рис. 1, 2).
(случайный процесс)
сигналов с заданной спектральной
плотностью на входе ОССЦ (рис. 1, 2).
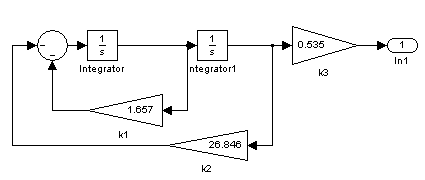
Рис. 1. Структурная схема задающего устройства
Вид
графика спектральной плотности случайного
процесса
![]() на выходе ЗУ дан
на рис. 2.
на выходе ЗУ дан
на рис. 2.
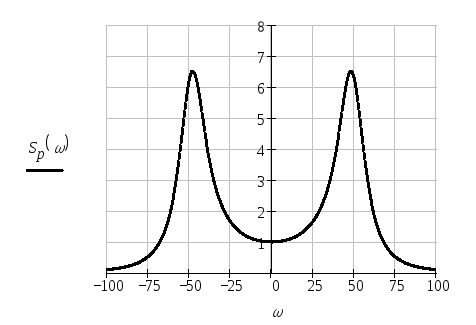
Рис. 2. График спектральной плотности
![]()
 .
.
Расчет
ГТ производится путем непосредственного
моделирования Simulink-схемы
с вычислением весовой функции
![]() расширенной системы (т.е. последовательного
соединения ЗУ и привода). Модель содержит
блоки вычисления модуля ошибки и
интегрирования. Время интегрирования
расширенной системы (т.е. последовательного
соединения ЗУ и привода). Модель содержит
блоки вычисления модуля ошибки и
интегрирования. Время интегрирования
![]() определяется временем затухания весовой
функции расширенной
системы (временем
её входа в 5 %
коридор). Для моделирования импульсного
воздействия
определяется временем затухания весовой
функции расширенной
системы (временем
её входа в 5 %
коридор). Для моделирования импульсного
воздействия
![]() (дельта-функции)
на входе расширенной
системы используется способ задания
начального условия на первом интеграторе
ЗУ (рис. 3).
(дельта-функции)
на входе расширенной
системы используется способ задания
начального условия на первом интеграторе
ЗУ (рис. 3).
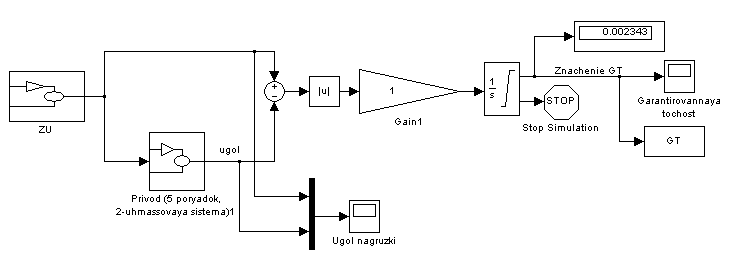
Рис.3. Схема вычисления гарантированной точности
Достигнутое в
конечный момент времени интегрирования
![]() значение гарантированной точности
слежения ЭСП на классе
значение гарантированной точности
слежения ЭСП на классе
![]() входных сигналов (см. показание дисплея
на рис. 7) составило
входных сигналов (см. показание дисплея
на рис. 7) составило
![]() .
.
Это говорит о высокой динамической точности испытуемой ОССЦ.
Тестовый
сигнал
(рис. 4),
моделирует реакцию расширенной системы
на дельта-функцию
![]() .
Вычисляется
весовая функция
.
Вычисляется
весовая функция
![]() и на ее основе строится релейный
сигнал
и на ее основе строится релейный
сигнал
![]() в прямом времени, который отправляется
в рабочее пространство Matlab,
где сигнал
в прямом времени, который отправляется
в рабочее пространство Matlab,
где сигнал
![]() преобразуется в обратном времени
преобразуется в обратном времени
![]() .
Таким способом формируется тест-сигнал
.
Таким способом формируется тест-сигнал
![]() для входа ЗУ.
Полученный
детерминированный тест-сигнал для
испытаний расширенной
системы имеет релейную
форму (рис. 5):
для входа ЗУ.
Полученный
детерминированный тест-сигнал для
испытаний расширенной
системы имеет релейную
форму (рис. 5):
![]() .
.
Примечание:
для моделирования импульсного воздействия
![]() на входе расширенной
системы используется единичное начальное
условие на первом интеграторе ЗУ (рис.
4).
на входе расширенной
системы используется единичное начальное
условие на первом интеграторе ЗУ (рис.
4).
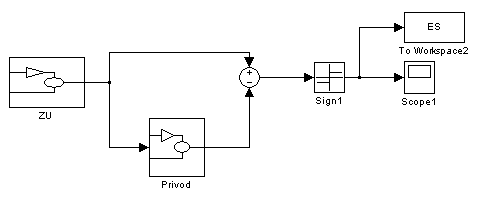
Рис.4.
Схема формирования
релейного сигнала
![]() в прямом времени
в прямом времени
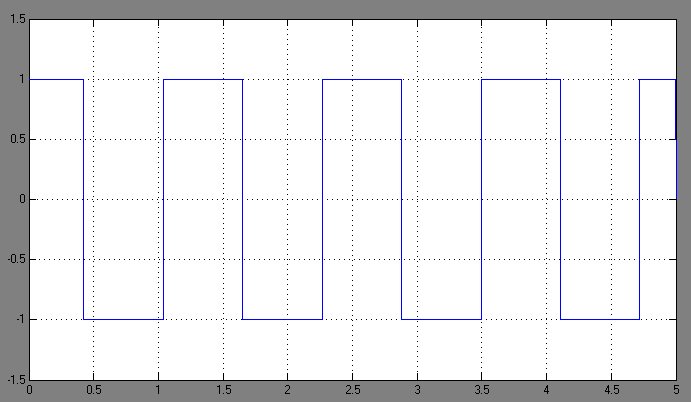
Рис 5. Детерминированный тест-сигнал FF1
Для испытаний СС используются следующие варианты случайного тест-сигнала:
1) сигнал
A
(случайный
центрированный
тест-сигнал релейной формы):
средний интервал постоянства
![]() ,
форма сигнала –
,
форма сигнала –
![]() ;
уровень сигнала 1.
;
уровень сигнала 1.
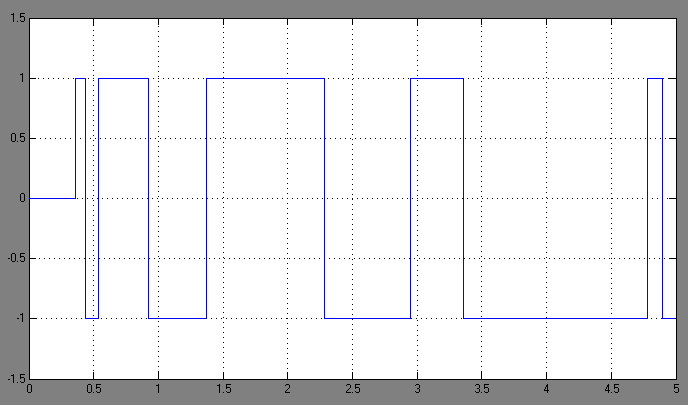
Рис.6. Реализация случайного тест-сигнала А релейной формы
Как видим, сигнал на рис. 10 имеет среднюю частоту равную средней частоте детерминированного тест-сигнала FF1.
2) сигнал B («типовой случайный входной сигнал СС» с широкой полосой частот):
- средний
интервал постоянства
![]() ;
;
- форма
сигнала –
![]() ;
;
- максимальный уровень сигнала 1.

Рис.7. Реализация случайного тест-сигнала В типовой формы
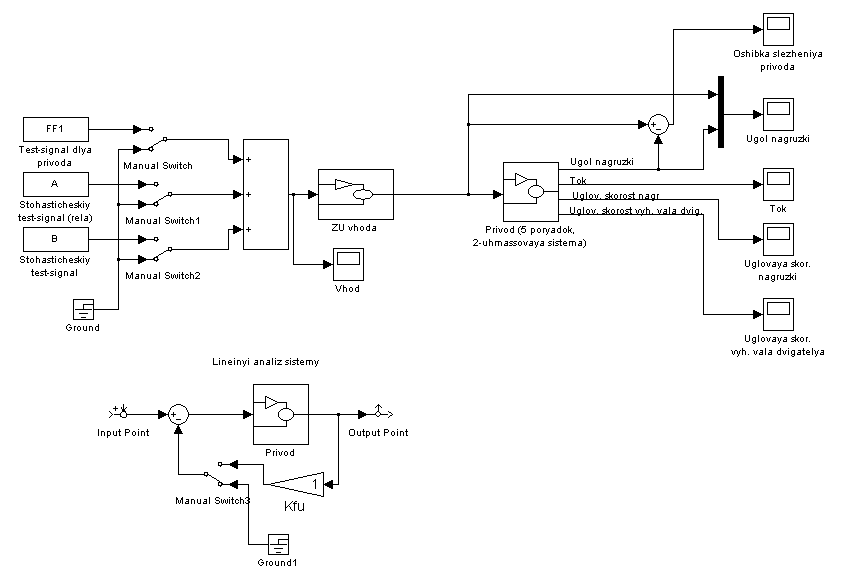
Рис.8 Виртуальный стенд для статистических испытаний
Ответы на контрольные вопросы:
1. Каковы традиционные подходы к испытаниям САУ на динамическую точность. Каковы их недостатки?
Лабораторно-стендовые испытания на динамику, точность и помехоустойчивость широко используются на всех этапах разработки. Стенды позволяют перенести часть натурных (полигонных) испытаний в лабораторные условия и значительно снизить затраты времени и средств на разработку системы. Традиционные методы полунатурных испытаний на динамическую точность не контролируют диапазон мгновенных значений ошибки в условиях реальных воздействий произвольной формы, характеризуются трудоемкостью, малыми точностью и надежностью результатов, понижением ресурса изделия и стенда.
2. В чем состоит математическая постановка задачи оптимизации динамических испытаний высокоточной системы на заданном классе сигналов?
Вычисление ГТ является задачей об оптимальном управлении. Оно сводится к отысканию такой ограниченной функции времени, при которой норма в смысле пространства C функции (t), вычисляемой как отклик расширенной системы при нулевых начальных условиях, достигает максимума. Из принципа максимума Понтрягина нетрудно установить, что такое управление в каждый момент времени может принимать только значения 1 или - 1.
3. Что такое предельная на классе сигналов ошибка? В чем суть метода ГТ? Что такое расширенная система? Как формируется ЗУ?
Предельная ошибка – результат прохождения через систему экстремального тест-сигнала.
Гарантированная
точность слежения понимается как
максимум модуля ошибки слежения CC
за сигналами v(t)
из заданного класса
![]() на заданном интервале времени, который
может быть и бесконечным.
на заданном интервале времени, который
может быть и бесконечным.
В запоминающем устройстве начальные условия полагаются нулевыми, а входным сигналом может быть любая ограниченная по уровню функция времени. Структура и параметры определяются с использованием положений метода ГТ, исходя из заданных предельных значений амплитуд и скоростей, либо исходя из заданных спектральных плотностей.
4. Почему входной сигнал ОССЦ – случайный?
Сигнал случайная, так как цель может маневрировать, и носитель во время движения может совершать угловые перемещения (связанные с качкой, вызванной неровностью поверхности, по которой он перемещается).
5. Какой вид имеет функция спектральная плотности сигнала на входе ОССЦ? Что она характеризует?
6. Какие тест-сигналы используются для испытаний? Чем они отличаются и как моделируются в стенде?
Первая
разновидность стохастического
тест-сигнала
имеет релейную форму с длительностями
интервалов постоянства (интервалов
между моментами переключения реле),
которые образуют последовательность
независимых случайных величин. Причем
случайные интервалы времени подчиняются
экспоненциальному закону распределения
и имеют среднее значение, равное среднему
интервалу постоянства тест-сигнала
![]() .
Полка реле тест-сигнала равна максимальной
амплитуде сигнала на входе ЗУ.
.
Полка реле тест-сигнала равна максимальной
амплитуде сигнала на входе ЗУ.
Вторая разновидность стохастического тест-сигнала имеет типовую форму – это, так называемый, «типовой входной случайный сигнал СС» с широкой полосой частот.
Совместное использование рассмотренных типов тест-сигналов повышает достоверность и надежность результатов полунатурных испытаний ОССЦ.
7. В чем отличия минимаксного и среднеквадратичного критериев точности?
Методы статистической динамики используют оценку точности САУ по критерию среднеквадратичной ошибки и не контролируют диапазон мгновенных значений сигнала ошибки на множестве его реализаций. Использование среднеквадратичного критерия точности при проектировании , как правило, не приемлемо, т.к. даже кратковременные, но значительные «всплески» ошибки: например, вследствие импульсов момента нагрузки при стрельбе пушки, может привести к потере цели и промаху снаряда.
Метод гарантированной точности предусматривает оценку точности по минимаксному критерию. Он позволяет контролировать при проектировании и при испытаниях предельную мгновенную ошибку слежения, которая возможна на заданных классах внешних воздействий и на интервале функционирования.