

2. Розрахункова частина:
2.1. Складання структурної схеми замкнутої системи з заданим законом регулювання. Розрахунок передаточних функцій розімкненої та замкненої системи.
Для даного закону управління:

з урахуванням відсутності впливу вітру та руху крену структурна схема замкненої системи (літак управляється льотчиком) буде мати вигляд:

При
розгляді руху рискання без урахування
впливу бокових сил на літак, траєкторія
польоту є прямолінійною (вектор шляхової
швидкості нерухомий) та має місце
співвідношення
 В цьому випадку передаточна функція,
яка визначає управляємість кута рискання
В цьому випадку передаточна функція,
яка визначає управляємість кута рискання по рулю направлення буде мати вигляд:
по рулю направлення буде мати вигляд:

Де
 ;
;
Підставивши числові значення отримаємо:



Передаточна функція пілота визначається виразом:

Передаточна функція розімкненої системи (по зовнішньому зворотному зв’язку):

де
 ― передаточна функція внутрішнього
контуру:
― передаточна функція внутрішнього
контуру:



Підставивши
числові значення в
 ,
отримаємо передаточну функцію розімкненої
системи:
,
отримаємо передаточну функцію розімкненої
системи:

Передавальна функція замкненої системи має вид:


2.2. Визначення передаточного коефіцієнта який забезпечує необхідні динамічні характеристики системи.
Оскільки розімкнена та замкнена передаточні функції не мають нулів, то для забезпечення необхідних динамічних характеристик системи скорис-таємось критерієм Гурвіца для розрахунку коефіцієнтів характеристичного рівняння.
Маємо характеристичне рівняння розімкненої системи:

Стандартне характеристичне рівняння 4-го порядку має вид:

Частковим випадком критерію Гурвіца для системи 4-го порядку буде виконання вимог:


Тобто:



 при
при


 при
при




при

Отже,
система буде стійкою при

Побудуємо
ЛАЧХ і ЛФЧХ розімкненої системи і
підібравши переда-точний коефіцшєнт
 , доб’ємося потрібних запасів стійкості:
, доб’ємося потрібних запасів стійкості:
s=tf('s');
k=2
Wr=tf([1.067],[0.0205 2.91 9.2091+1.067*k 6.475+1.067*k 1],'inputdelay',0.2)
figure(1)
margin(Wr)
grid on
Амплітудна частотна характеристика показує, як пропускає ланка сигнал різної частоти. Оцінка пропускання робиться по відношенню амплітуд вихідної та вхідної величин.
Фазова частотна характеристика показує фазові зсуви, що вносяться ланкою на різних частотах.
Запас стійкості по амплітуді визначається як кількість дБ, на яке потрібно збільшити підсилення системи, щоб вона досягла межі стійкості. Запас стійкості по фазі визначається як різниця між 1800 і абсолютним значенням аргументу передавальної функції на частоті зрізу.

Отримали запаси стійкості розімкненої системи:
по амплітуді ― 24.9 дБ, по фазі ― 155°.
Запас
по фазі і амплітуді задовольняє необхідний
(mф
≥250,
mа
≥10 дБ) при значеннях передаточного
коефіцієнта
 .
.
Побудуємо ЛАЧХ і ЛФЧХ замкненої системи для забезпечення полоси частот пропускання не менше ω=1,2 1/с і показника коливальності амплітудної частотної характеристики не вище М=1,25.
Показником коливальності називається максимальне значення ординати Мmax амплітудної характеристики замкнутої системи при початковій ординаті, рівній одиниці, тобто, відносна висота резонансного піку.
Wz=tf([1.067],[0.0205 2.91 9.2091+1.067*k 6.475+1.067*k 2.067],'inputdelay',0.2)
figure(2)
bode(Wz)
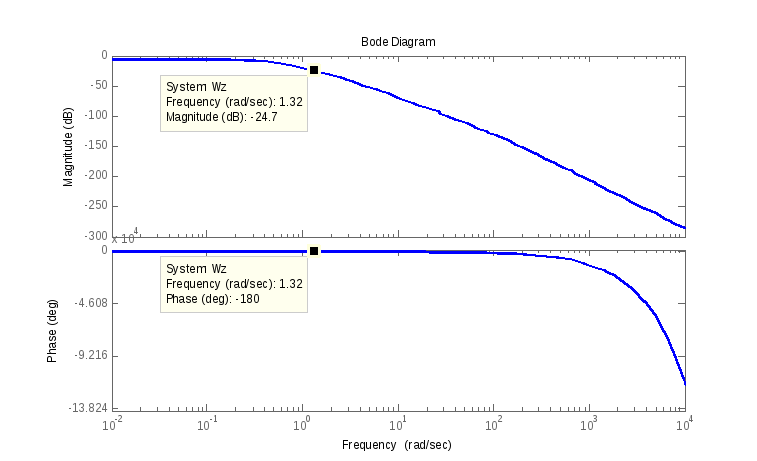
Отже, отримали частоту пропускання ω=1.32 більшу за 1.2 1/с, та показник коливальності М =0, що задовольняє умови завдання.
Побудуємо перехідний процес Δψ(t) при одиничному ступінчастому впливі керуючого сигналу Δψз (t).

Як бачимо, перерегулювання дорівнює 0.0272, що задовольняє умови завдання.