Задача 3. Математическое моделирование и настройка сар по контролируемым возмущениям с использованием поисковых методов оптимизации.
Постановка задачи.
Дано.
1. Блок-схема структуры системы регулирования по возмущению изображена на рисунке 1.
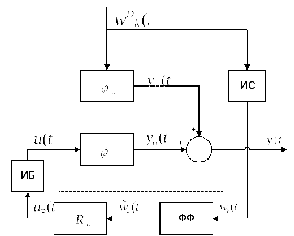
Рисунок 1 – Блок-схема структуры системы регулирования по возмущению
где  - контролируемые возмущения;
- контролируемые возмущения;
 -
математическая модель канала преобразования
контролируемого возмущения;
-
математическая модель канала преобразования
контролируемого возмущения;
 -
математическая модель канала преобразования
регулирующих воздействий;
-
математическая модель канала преобразования
регулирующих воздействий;
 -
регулирующие воздействия;
-
регулирующие воздействия;
 -
выходное воздействие;
-
выходное воздействие;
 -
выходное воздействие канала регулирования;
-
выходное воздействие канала регулирования;
 -
выходное воздействия канала возмущений;
-
выходное воздействия канала возмущений;
 -
регулятор.
-
регулятор.
2. Математические модели каналов преобразования контролируемых возмущений и регулирующих воздействий φu(s) и φw(s) – последовательное соединение инерционного звена первого порядка и звена чистого запаздывания. Значения параметров моделей: 1) kи ; Tи ; и; kw; Tw; w задаются преподавателем.
3. Модели контролируемых и приведенных к выходу возмущений представлены с помощью следующей схемы
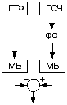
Рисунок 2 – Модель приведённых к выходу объекта и контролируемых возмущений
где ГТФ – генератор типовых функций,
ГСЧ – генератор случайных чисел,
МБ – масштабирующий блок,
ФФ – формирующий фильтр.
4. Начальные условия: y(0) = 0, и(0) = 0, wк(0) = 0.
5. Поисковая процедура: метод покоординатного поиска.
6. Критерий точности – среднеквадратическое отклонение (СКО)
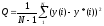
где
 - значение выходной величины,
- значение выходной величины,
 -
заданное значение выходной величины.
-
заданное значение выходной величины.
Требуется.
1. Построить математическую модель системы регулирования по отклонению в общем и в конкретизированном виде.
2. Составить алгоритм моделирования системы регулирования по возмущению.
3. Программная реализация системы регулирования по возмущению.
4. Используя поисковую процедуру, найти такие параметры закона регулирования, при которых значение критерия точности регулирования минимально.
5. Привести анализ результатов моделирования и настройки.
Задача 4. Численные исследования идентификаторов на базе замкнутых динамических систем.
Постановка задачи.
Дано.
1. Модельный объект идентификации
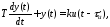 (1)
(1)
где y и u – соответственно выходные и регулирующие воздействия объекта идентификации; k, T – коэффициент передачи и постоянная времени объекта, соответственно; τu – время запаздывания по каналу преобразования регулирующих воздействий; t – непрерывное время.
2. Диапазон изменений действительных значений коэффициентов модельного объекта идентификации (1) ограничен следующей областью
 (2)
(2)
3. Математическая модель объекта идентификации представлена в дискретной линейно-параметрической форме
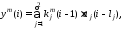 (3)
(3)
где
 – выходное
воздействие модели объекта идентификации;
– выходное
воздействие модели объекта идентификации;
 –
коэффициенты модели объекта (3); lj
–
дискретное
запаздывание по j-у
каналу преобразования входных воздействий;
i
–
дискретное время; j
– номер учитываемого входного воздействия.
–
коэффициенты модели объекта (3); lj
–
дискретное
запаздывание по j-у
каналу преобразования входных воздействий;
i
–
дискретное время; j
– номер учитываемого входного воздействия.
Модель (3) получена из (1) следующим образом:
3.1) осуществляли переход от дифференциального (1) к дифференциально-разностному уравнению

(4)
где lu – дискретное запаздывание по каналу преобразования регулирующих воздействий, определяемое как
 (5)
(5)
Δt – шаг дискретизации времени;
значения
коэффициентов
 рассчитывали
по формулам
рассчитывали
по формулам
 (6)
(6)
3.2) для перехода от модели (4) к модели линейно-параметрического вида (3) в соответствии с схемой Гаммерштейна [4] переопределяли входной сигнал

(7)

(8)
4. Алгоритм идентификации на базе ЗДС
 (9)
(9)

(10)
 11)
11)
где
 – ошибка расчета выходного воздействия.
– ошибка расчета выходного воздействия.
5. Входное воздействие объекта идентификации
 (12)
(12)
5. Момент останова алгоритма (9) – (11) (окончания одного цикла обработки) определяется с помощью неравенства
 (13)
(13)
где
 -
момент времени выхода переходного
процесса на установившееся значение.
-
момент времени выхода переходного
процесса на установившееся значение.
6. Начальные условия
y(0)
= u(0)
=
 .
(14)
.
(14)
7. Критерий точности идентификации представлен для каждого коэффициента соотношением
 (15)
(15)
Требуется.
1. Найти оценки коэффициентов модели.
2. Оценить точность алгоритма идентификации на модельных данных.
ПОСТАНОВКИ ЗАДАЧ ПО ПРАКТИЧЕСКИМ ЗАНЯТИЯМ
Задача 1. Исследование и оптимизация муниципальной финансово-промышленной группы на базе математического имитационного моделирования и поисковых методов в детерминированных условиях.
Постановка задачи.
Дано.
1. Общая структура упрощенной модели МФПГ, состоящая из двух предприятий, одного банка и управляющей компании (рисунок 1).
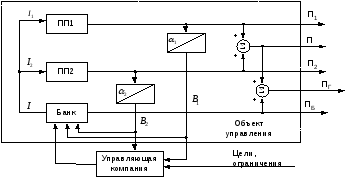
Рисунок 1 - Структура упрощенной модели МФПГ
Обозначения,
принятые на рисунке 1:
 – предприятие, производящее продукцию
– предприятие, производящее продукцию ,
в том числе и ее продажу в денежном
выражении;
,
в том числе и ее продажу в денежном
выражении; – возврат инвестицийI
от предприятий банку;
– возврат инвестицийI
от предприятий банку;
 – суммарная прибыль предприятий;
– суммарная прибыль предприятий; – прибыль банка;
– прибыль банка; – суммарная прибыль МФПГ.
– суммарная прибыль МФПГ.
На
основе анализа функционирования МФПГ
управляющая компания принимает решение
о выделении величины и структуры
(траектории) инвестиций
 и
и (I1+I2=I)
предприятиям
(I1+I2=I)
предприятиям
 и
и ,
а также процентной ставки
,
а также процентной ставки .
.
2.
Модель предприятия, производящего
продукцию
 в текущий момент времени, принята как
сумма двух составляющих
в текущий момент времени, принята как
сумма двух составляющих


 ,
(1)
,
(1)
где
 –
выпуск продукции предприятием
–
выпуск продукции предприятием ;
;
 –
возврат взятого предприятием
–
возврат взятого предприятием
 кредита с процентами.
кредита с процентами.
2.1.
Модель выпуска продукции
 предприятием
предприятием принята, исходя из следующих соображений:
принята, исходя из следующих соображений:
инвестиции взяты в виде единовременного, однократного кредита в момент времени
 ;
;отдача от освоения инвестиций начинает проявляться с запаздыванием на время
 ;
;на интервале времени
 от момента
от момента
 до
до производство возрастает линейно;
производство возрастает линейно;после момента времени
 производство остается на постоянном
уровне.
производство остается на постоянном
уровне.
Для этих условий аналитическая запись модели выпуска продукции в текущий момент времени имеет вид
 (2)
(2)
где
 – коэффициент модели
– коэффициент модели ,
, ,
отражающий изменение производства за
единицу времени;
,
отражающий изменение производства за
единицу времени;
 –переменные.
–переменные.
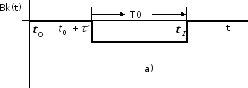
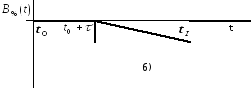
Графически модель (2) представлена на рисунке 2.

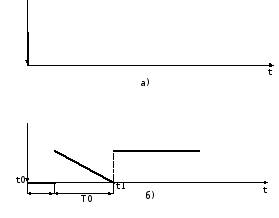
а) импульс инвестиции; б) реакция предприятия на инвестицию

в виде импульса.
Рисунок 2 − Графическое представление выпуска продукции
Интеграл
 означает преобразование импульсаI
(рисунок 2а) в ступенчатое воздействие
на интервале времени от
означает преобразование импульсаI
(рисунок 2а) в ступенчатое воздействие
на интервале времени от
 до
до ,
т.е. с помощью этой части модели (2)
реализуется так называемый интеграл с
отсечкой. Второй интеграл
,
т.е. с помощью этой части модели (2)
реализуется так называемый интеграл с
отсечкой. Второй интеграл означает накопление от полученного
ступенчатого воздействия со скоростью,
определяемой величиной коэффициента
означает накопление от полученного
ступенчатого воздействия со скоростью,
определяемой величиной коэффициента .
.
Интегральная
модель, характеризующая накопление
(интегрирование) выпуска продукции на
интервале времени от
 до
до ,
представлена в виде
,
представлена в виде
 (3)
(3)
или с учетом выражения (2)
 (4)
(4)
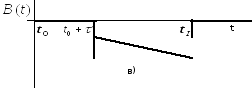
Графически модель (4) представлена на рисунке 3.
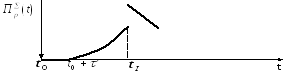
Рисунок 3 - Графическое представление интегральной модели выпуска продукции
2.2
Модель возврата взятого предприятием
 кредита
кредита принята, исходя из соображений:
принята, исходя из соображений:
-
возврат кредита начинается в момент
времени
 и до момента времени
и до момента времени полностью возвращается банку равными
долями;
полностью возвращается банку равными
долями;
- процент начисления на кредит взят постоянным и рассчитываемым от величины остатка невозвращенного кредита.
Аналитически
при этих условиях модель возврата
кредита с процентами в текущий момент
времени
 записывается в следующем виде
записывается в следующем виде
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
 ,
(10)
,
(10)
где
 сумма возврата предприятием
сумма возврата предприятием кредита в момент времениt;
кредита в момент времениt;
 начисления
с коэффициентом
начисления
с коэффициентом
 на возвращенный кредит;
на возвращенный кредит;
 – коэффициент,
зависящий от размера инвестиций
– коэффициент,
зависящий от размера инвестиций
 ,
величины
,
величины и времени возврата инвестиций
и времени возврата инвестиций
 – момент
времени полного возврата предприятием
– момент
времени полного возврата предприятием
 кредита
с процентами.
кредита
с процентами.
Выражения
(6), (7) описывают динамику мгновенных
значений возврата “чистого” кредита
 и
начислений на возвращенный кредит
и
начислений на возвращенный кредит ,
в то время как формулы (8)-(9) – накопленную
с момента времени
,
в то время как формулы (8)-(9) – накопленную
с момента времени сумму возврата “чистого” кредита
сумму возврата “чистого” кредита .
.
Формулы (5)-(7) поясняются графиками (рисунок 4).