

оптимальное проектирование Семён
.docxОглавление
Введение 2
1.Объект и критерии оптимизации 3
2.Решение задачи оптимизации 7
Заключение 12
Список использованной литературы 13
Введение
В своей жизни человек часто сталкивается с ситуацией, когда ему из некоторой совокупности возможных вариантов своего поведения или принятия решения в какой-либо области деятельности необходимо выбирать один вариант. Наилучший вариант поведения (принятия наилучшего решения) можно выбирать по-разному. Если такой выбор предусматривает проведение количественного анализа ситуации путем сравнения различных вариантов с помощью какой-либо количественной оценки этих вариантов, то говорят о необходимости решения задачи оптимизации. Ясно, что задача оптимизации имеет смысл, если есть несколько возможных вариантов ее решения.
По содержанию задачи оптимизации весьма разнообразны. Они могут быть связаны с проектированием технических процессов, с распределением ограниченных ресурсов и планированием работы предприятий, наконец, с решением проблем, возникающих в повседневной жизни человека. Всевозможные устройства, процессы и ситуации, применительно к которым предстоит решать задачу оптимизации, называются объектами оптимизации.
В своём проекте мы возьмем объект оптимизации, поставим задачу оптимизации, сформулируем критерии оптимизации и постараемся решить поставленную задачу.
-
Объект и критерии оптимизации
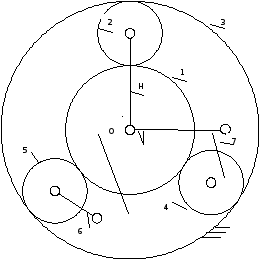
Рассмотрим планетарный механизм с тремя сателлитами и дополнительными шатунами (рисунок 1). Он будет являться объектом оптимизации.
Практика
использования планетарных механизмов
обширна благодаря тому, что они способны
передавать значительные мощности и
реализовывать большие передаточные
числа. Число сателлитов в планетарной
передаче может быть различным. Компактность
и малая масса планетарных передач в
значительной степени объясняются
распределением передаваемой мощности
между сателлитами и использованием
внутреннего зацепления. Однако потери
на трение в планетарных механизмах
бывают настолько существенными, что
может стать сомнительным вопрос о
целесообразности их использования.
Основной причиной этих потерь является
наличие в планетарных механизмах
избыточных связей.
Избыточными связями в механизмах называют такие связи, устранение которых не увеличивает подвижность механизма, обеспечивая при этом их адаптивность к изменяющимся нагрузкам. Трение приводит к неизбежному чрезмерному износу зубьев колес, вызывающих потерю зацепления отдельных сателлитов с центральными колесами.
Анализ показывает, что избыточные связи в многосателлитных планетарных механизмах возникают из-за ошибок при их проектировании.
В простом планетарном механизме с одним сателлитом, при движении сателлита, имеющего смещенную относительно оси вращения всего механизма массу, в механизме появляется дисбаланс сил, вызванный переменной по направлению инерционной силой сателлита. Для устранения этого дисбаланса в механизм и добавляют один или более сателлитов, которые компенсируют инерционные силы друг друга и уравновешивают весь механизм.
Полные усилия между зубьями сцепляющихся колес (рисунок 2) F12 и F21 направлены, как известно, по линии зацепления NN, образующей угол α, называемый углом зацепления, с касательной к начальным окружностям сопряженных колес в полюсе зацепления P. Равные, но противоположно направленные силы F12 и F21 приложены соответственно к зубьям колёс 1 и 2.
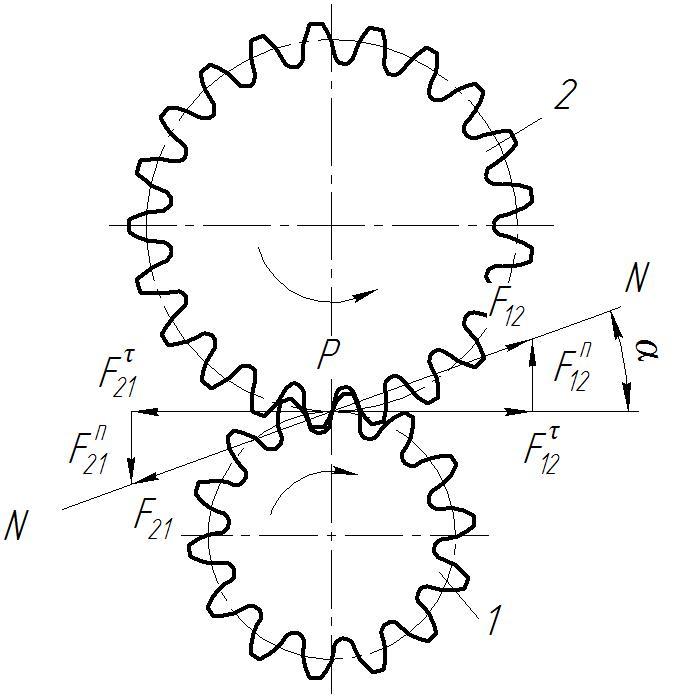
Рисунок 2 – Силы взаимодействия между зубьями
Для
уравновешивания механизма, изображенного
на рисунке 1, необходимо, чтобы сателлиты
2, 4 и 5 были установлены так, что угол
между ними был равен
 (рисунок 3,а). Рассмотрев механизм, можно
увидеть треугольник расположения
сателлитов (рисунок 3,б).
(рисунок 3,а). Рассмотрев механизм, можно
увидеть треугольник расположения
сателлитов (рисунок 3,б).
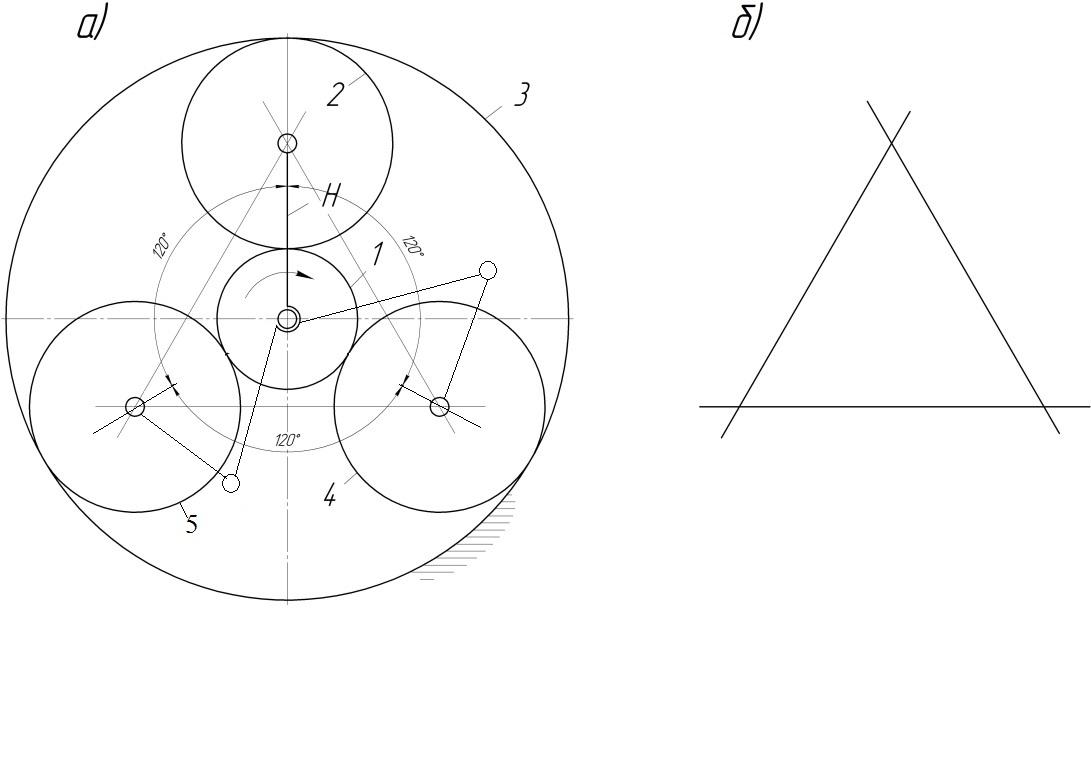
Рисунок 3 – Положения установки сателлитов:
а) планетарных механизм; б) треугольник расположения сателлитов
Усилия в зацеплениях между сателлитами и центральным колесом буду направлены, как показано на рисунке 4. Из них можно составить замкнутый треугольник сил. В данном случае он будет равносторонний. Механизм будет уравновешенный.
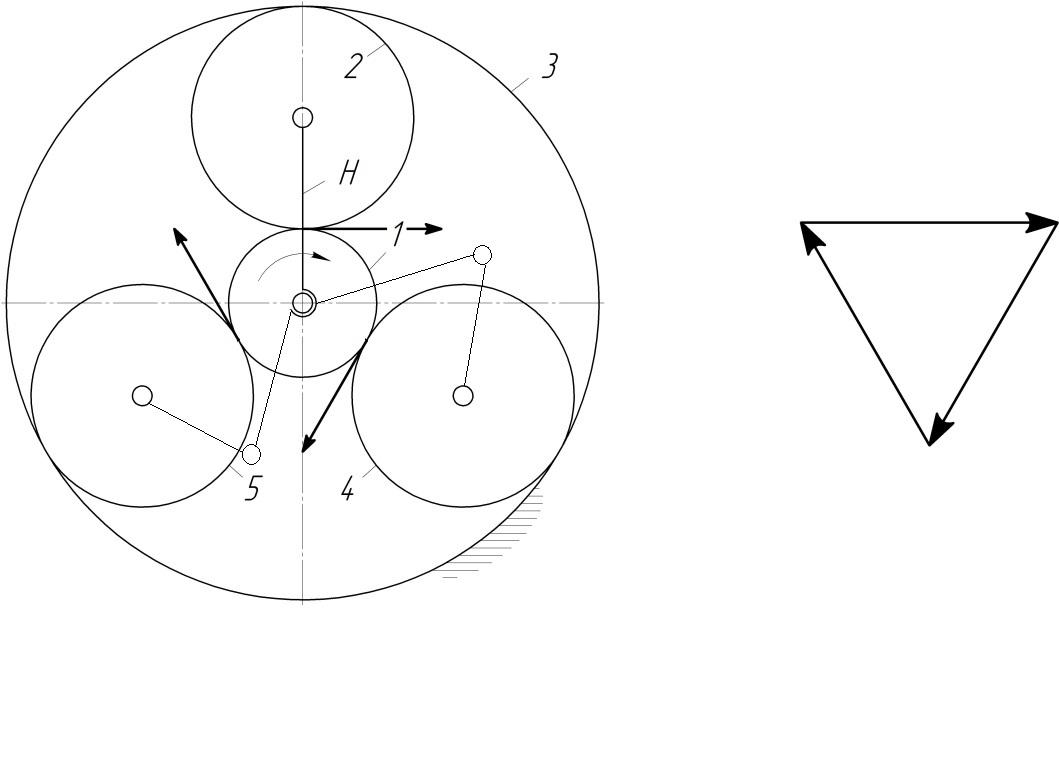
Рисунок 4 – Усилия в планетарной передаче с тремя сателлитами
Но если одно из сателлитов не будет установлено положенным образом, то мы получим следующую картину (рисунок 5). Так как треугольник сил должен быть замкнутым, то появляется еще одна сила.
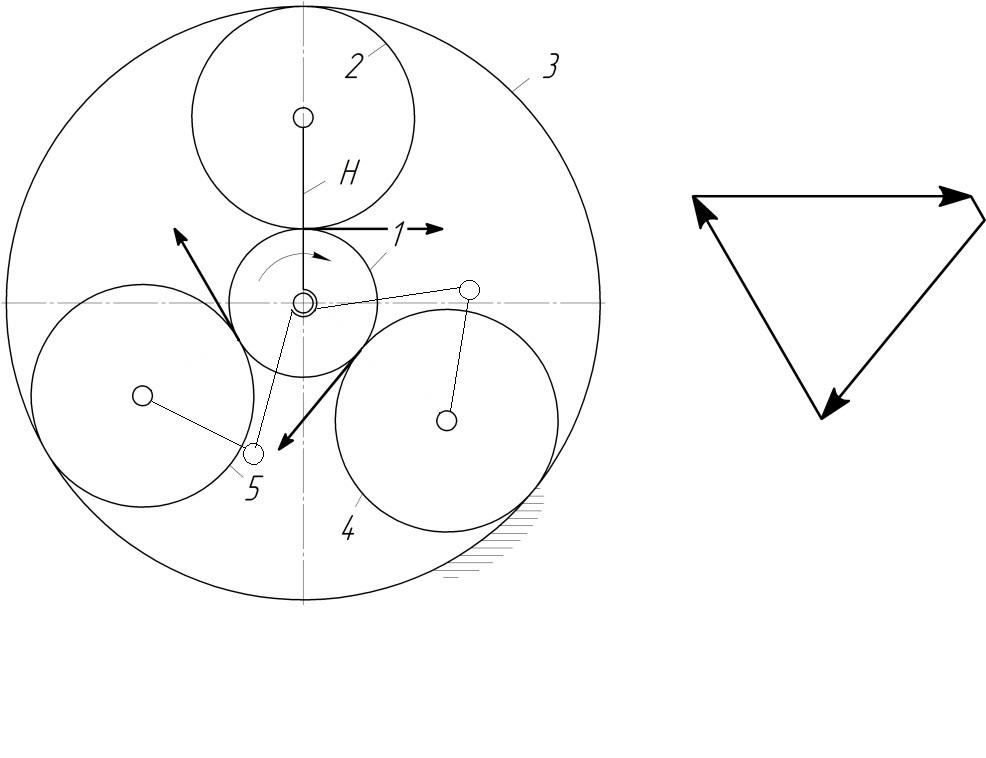
Рисунок 5 – Не идеальное расположение сателлитов
Абсолютно точно спроектировать и собрать данный планетарный механизм невозможно из-за большинства допускаемых погрешностей, но мы можем рассмотреть наиболее приближенный способ их установки, который позволит свести возникающую силу к минимуму. Это и будет критерием оптимизации.
-
Решение задачи оптимизации
Рассмотрим планетарный механизм с тремя сателлитами (рисунок 6) и зададимся параметрами:
Диаметрами колес:
 – делительный
диаметр солнечного колеса;
– делительный
диаметр солнечного колеса;
 – делительный
диаметр сателлитов;
– делительный
диаметр сателлитов;
 – делительный
диаметр неподвижного центрального
колеса.
– делительный
диаметр неподвижного центрального
колеса.
Размерами водила:
 – линейный
размер водила.
– линейный
размер водила.
Углом поворота:
 – угол
между сателлитами.
– угол
между сателлитами.
Силами в зацеплении:
 и
и
 –
полные усилия между зубьями a
и g
колес.
–
полные усилия между зубьями a
и g
колес.
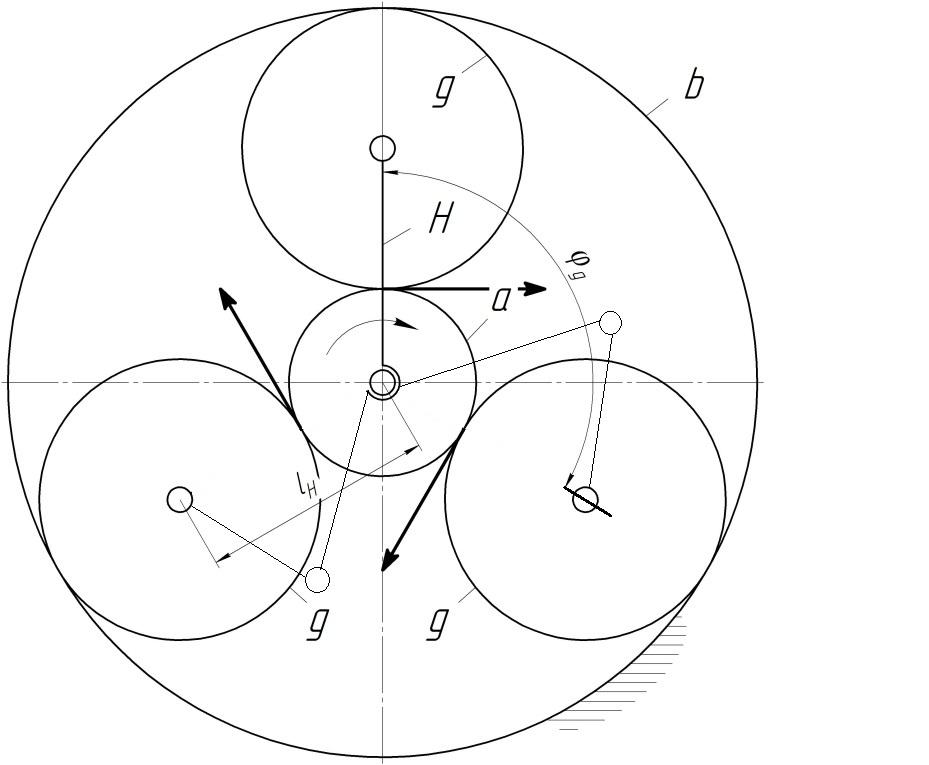
Рисунок 6 – Данный механизм
Для
анализа передачи простроим все
интересуемые нас возможные положения
сателлитов (рисунок 7) в выбранном
масштабе
 .
Для этого один сателлит оставим на своем
месте, а два других будем симметрично
сдвигать с интервалом в
.
Для этого один сателлит оставим на своем
месте, а два других будем симметрично
сдвигать с интервалом в
 .
На чертеже указываем силы, действующие
в зацеплении между центральным колесом
и сателлитами в масштабе
.
На чертеже указываем силы, действующие
в зацеплении между центральным колесом
и сателлитами в масштабе
 .
.
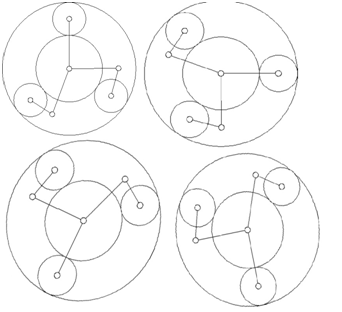
Рисунок 7 – Различные положения сателлитов
Получаем 14 различных положений сателлитов. Строим 14 многоугольников сил. Так как они должны быть замкнуты, то мы можем определить величину дополнительной, возникающей силы в каждом положении (рисунок 8). Из рисунка видно как различны эти силы. В 10 положении можно наблюдать идеальное расположение сателлитов.
Далее
мы можем построить диаграмму зависимости
величины возникающей силы от угла
установки сателлита
 :
:
 .
Вправо в масштабе
.
Вправо в масштабе
 откладываем значения
откладываем значения
 ,
а вверх – значения
,
а вверх – значения
 в выбранном масштабе
в выбранном масштабе
 (рисунок 9).
(рисунок 9).
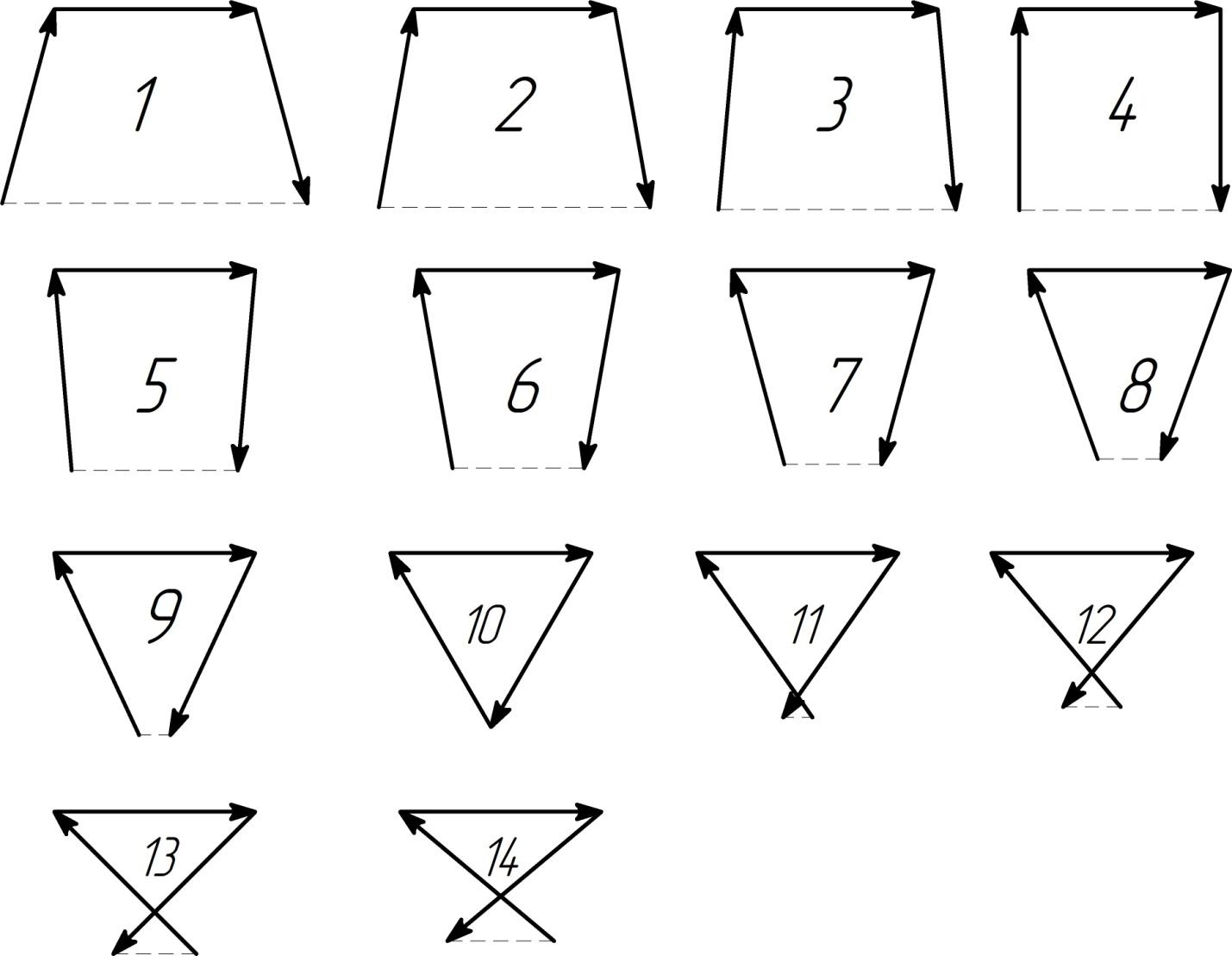
Рисунок 8 – Замкнутые многоугольники сил
Из
диаграммы определяем максимальное
значение
 .
Допускаемое значение этой силы будет
составлять 5% от
.
Допускаемое значение этой силы будет
составлять 5% от
 .
Проводим прямую
.
Проводим прямую
 .
На пересечении с графиком получаем
область допустимых значений угла между
сателлитами:
.
На пересечении с графиком получаем
область допустимых значений угла между
сателлитами:
 .
.
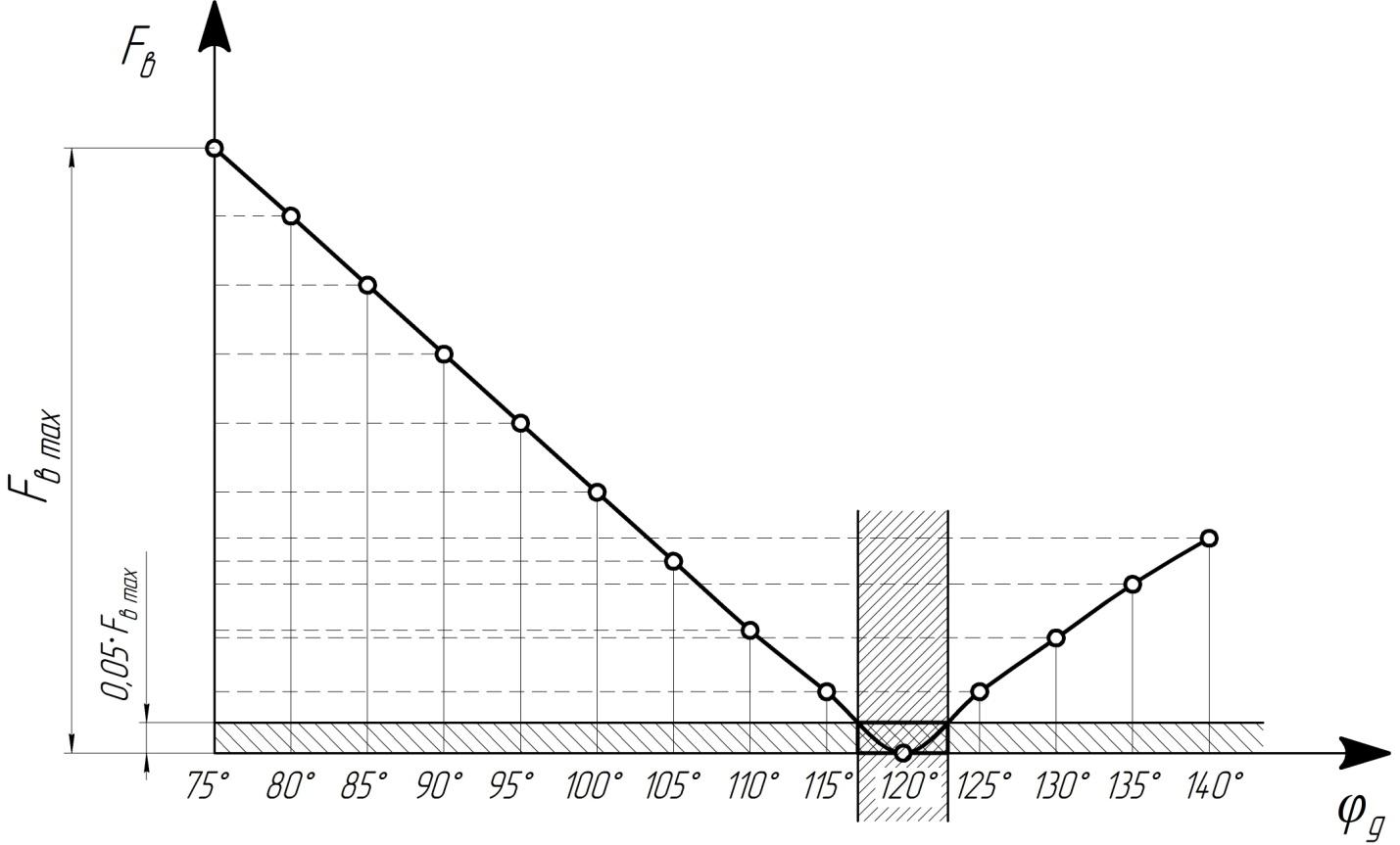
Рисунок
9 – Диаграмма

Заключение
Рассмотрев задачу оптимизации трехсателлитного планетарного механизма, можно сделать следующие выводы:
-
Из-за ошибок проектирования в планетарных механизмах появляются избыточные связи, которые приводят к потерям на трение, неизбежному чрезмерному износу зубьев колес и вызывают потерю зацепления отдельных сателлитов с центральными колесами.
-
Для устранения дисбаланса сил в механизм с одним сателлитом добавляют еще один или более сателлитов, которые компенсируют инерционные силы друг друга и уравновешивают весь механизм.
-
Однако расположение дополнительных сателлитов должно быть не произвольным, так как при расположении колес при угле между ними отличным от
 в механизме появляется помимо сил в
зацеплении еще одна дополнительная
сила, и механизм необходимо уравновешивать
дополнительно.
в механизме появляется помимо сил в
зацеплении еще одна дополнительная
сила, и механизм необходимо уравновешивать
дополнительно. -
Мы рассмотрели данную задачу и определили критерий, по которому можно собрать механизм, изображенный на рисунке 6, и он будет работать с наименьшими возмущающими силами.
Список использованной литературы
-
Руденко Н.Ф. Планетарные передачи / Н.Ф. Руденко. – М.: Машгиз, 1947. – 756с.
-
Живаго Э. Я., Дворников Л.Т., Адамович Н.О. Синтез зубчатых механизмов: методические указания. – СибГИУ. – Новокузнецк, 2007. – 22с., ил.
-
Макиенко А.В. Проблема избыточных связей в планетарных механизмах / Герасимов С.П., Дворников Л.Т. // Студенческий научный форум [Электронный ресурс]: II Общероссийская студенческая электронная научная конференция / Российская Академия Естествознания. – Электрон. дан.: RAE/RU, 2010. – Режим доступа: http://www.rae.ru/use/?section=content&op=show_article&article_id=7797084