

Пример решения задачи 2
Для примера рассмотрим манипулятор, изображенный на рис. 5.
Звенья механизма обозначим арабскими цифрами, количество их n = 5.
Кинематические пары, входящие в состав данного механизма:
p5 = 3, в том числе две вращательные (А, В) и одна поступательная (С);
р4 = 2, сферический шарнир с пальцем ( Д ) и цилиндрическая пара (В). До тех пор, пока захват (звено 5) не соединяется с объектом манипулирования, кинематическая цепь является незамкнутой.
Определяем степень подвижности:
W = 6 5 - 54 - 42 = 7
Таким образом, механизм имеет 7 независимых движений для ориентации и перемещения в рабочем пространстве.
После того, как захват подведен к объекту манипулирования и объединен с ним, количество подвижных звеньев становится на единицу меньше, т.е. n = 4. Число кинематических пар остается неизменным. Теперь можно определить маневренность манипулятора.
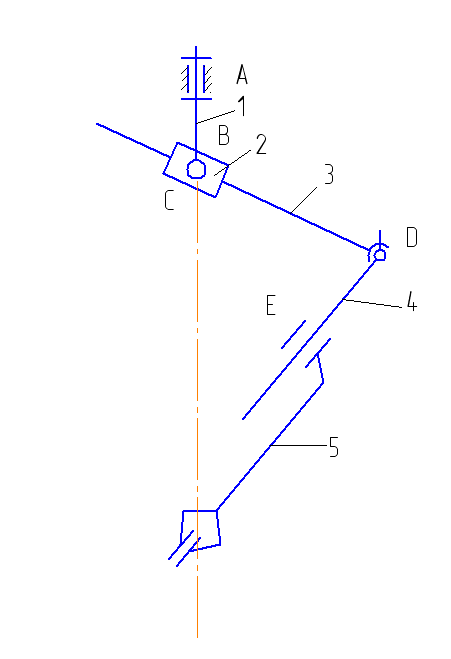
Рис. 5. Структурная схема руки манипулятора
W = 65 - 53 - 42 = 1
Тот факт, что маневренность равна единице, означает, что при фиксированном положении захвата (неподвижная точка В) звенья механизма могут менять свое положение в зависимости от положения одного из звеньев: например, при вращении звена 2 одновременно изменятся длины сторон ВД и ДЕ, а также углы треугольника ВДЕ, то есть положение звеньев 3 и 4 является функцией угла поворота звена 2.
Задача 3. Тема «Кинематический анализ зубчатых механизмов»
Задачей кинематического анализа зубчатых механизмов является определение передаточного отношения и частоты вращения выходных звеньев.
Простейшая зубчатая передача состоит из двух колес с зубьями, посредством которых они сцепляются между собой. По форме колес различают цилиндрические, конические ,эллептические, фигурные зубчатые передачи.
Наиболее распространены зубчатые колеса круглой формы, т. е. цилиндрические и конические. Коническая зубчатая передача осуществляет вращение между валами, геометрические оси которых пересекаются. По форме и расположению зубьев на колесе различают прямые, косые, шевронные, круговые и другие криволинейные зубья.
Постоянство передаточного отношения зубчатой передачи обеспечивается формой профиля зубьев. Наибольшее распространение получил эвольвентный профиль, так как отличается простотой изготовления (методом копирования или обкатки).
При нарезании зубчатых колес с числом зубьев эвольвентного профиля меньше некоторого предельного значения происходит подрез ножек зубьев, в результате чего прочность зубьев значительно снижается. Для устранения подрезания применяют зубчатые зацепления со смещением или так называемые корригированные зубчатые передачи.
К основным геометрическим параметрам, характеризующим зубчатое зацепление, относятся: модуль, угол зацепления, диаметры делительной, начальной и основной окружностей, коэффициент перекрытия.
Зубчатые механизмы подразделяются на механизмы с неподвижными и подвижными осями вращения.
Для выполнения кинематического анализа необходимо определить передаточное отношение зубчатой передачи.
Передаточным отношением U1i называется отношение угловой скорости ω1 зубчатого колеса 1 к угловой скорости i го ωi зубчатого колеса. Вместо угловых скоростей можно использовать также понятие частоты вращения n:
U1i = ω1 / ωi = n1 / ni. (3.1)
Угловые скорости колес, находящихся в зацеплении, обратно пропорциональны радиусам начальных окружностей rw и числам зубьев колес Z.
Таким образом, передаточное отношение для пары цилиндрических колес внешнего зацепления (рис.6, а)
![]()
, (3.2)
![]() внутреннего
зацепления ( рис.6, б)
внутреннего
зацепления ( рис.6, б)
![]()
.
Общее передаточное отношение многозвенного механизма равно произведению передаточных отношений отдельных ступеней [6, с.93]
U1i = U12 U23 U34...U(i-1) i (3.3)
Определение передаточного отношения рекомендуется производить в следующем порядке:
определить число ступеней в передаче;
найти передаточное отношение каждой ступени;
перемножить передаточные отношения ступеней.
Полученное число и будет передаточным отношением многоступенчатой передачи.
Механизмы с одной степенью свободы, имеющие неподвижное колесо, называют планетарными. Особенность планетарных механизмов - наличие зубчатых колес (сателлитов) с движущимися геометрическими осями.
а
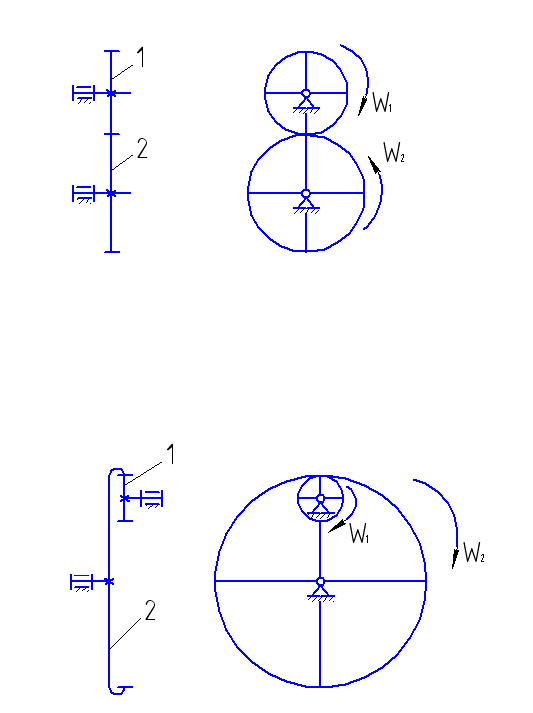
Рис.6.
б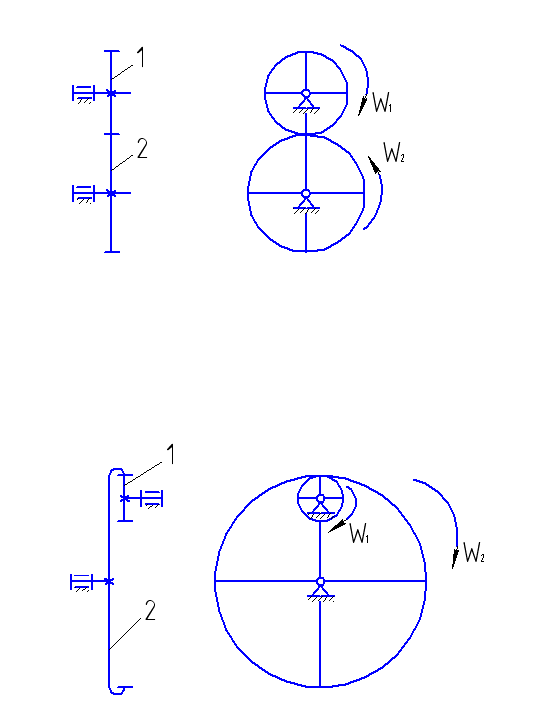
Продолжение рис.6.
Механизмы с числом степеней свободы W > 2, которые обычно не имеют неподвижного колеса, называют дифференциальными.
Поскольку сателлиты в передачах с подвижными осями совершают сложное вращательное движение, то определение передаточного движения производят методом обращенного движения [3, с.34-35].
Условие. Исходные данные к задаче 3 приведены в табл.4, кинематические схемы зубчатых механизмов представлены на рис.7. Определить число степеней подвижности механизма, неизвестные числа зубьев колес и частоту вращения колес.

Схема 0 Схема 1
Схема 2 Схема3
Рис. 7
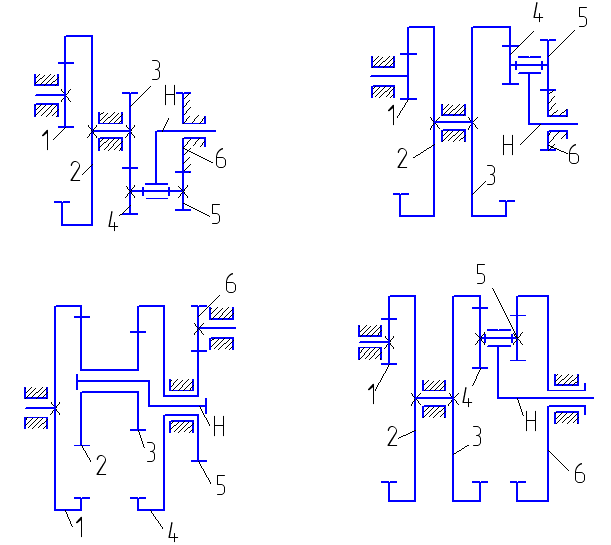
Схема 4 Схема 5
Схема 6 Схема 7
Продолжение рис. 7
![]()
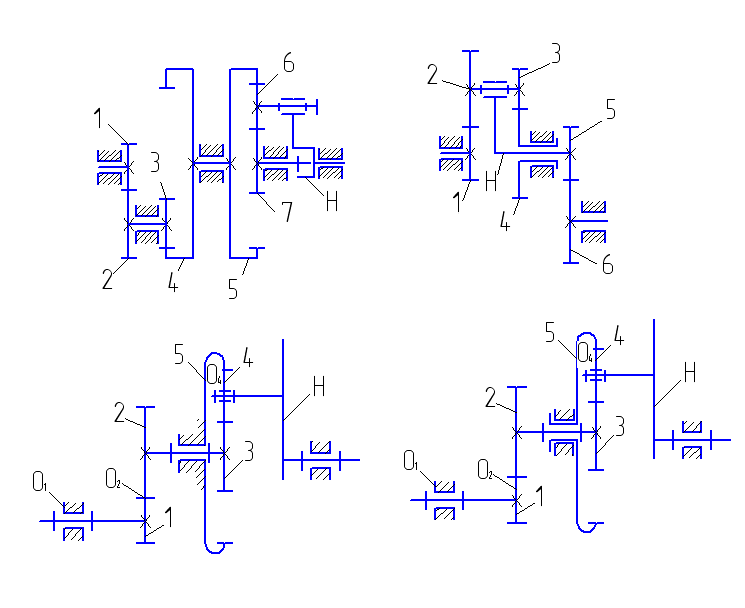
Схема 8 Схема 9
Окончание рис. 7
Таблица 4
Варианты исходных данных к задаче 3
|
Величина |
Предпоследняя цифра шифра зачетной книжки | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
Z1 |
20 |
25 |
150 |
17 |
30 |
25 |
65 |
20 |
30 |
|
|
Z2 |
100 |
50 |
20 |
34 |
210 |
200 |
62 |
120 |
70 |
20 |
|
Z3 |
30 |
25 |
|
120 |
40 |
200 |
63 |
140 |
20 |
40 |
|
Z4 |
40 |
|
160 |
10 |
40 |
25 |
|
|
120 |
80 |
|
Z5 |
20 |
30 |
25 |
|
20 |
|
30 |
30 |
140 |
17 |
|
Z6 |
|
70 |
40 |
50 |
|
80 |
60 |
150 |
20 |
51 |
|
n1. об/мин |
1000 |
1450 |
750 |
|
|
|
950 |
1500 |
1000 |
750 |
|
nН. об/мин |
|
|
|
45 |
60 |
50 |
50 |
40 |
60 |
|
|
Опре-делить |
Z6, nH |
Z4, nH |
Z3, nH |
Z5, n1 |
Z6, n1 |
Z5, n1 |
Z4,n6 |
Z4,n6 |
Z7,n7 |
Z1,n4 |