

upr sudnom шарлай / 16. Colreg
.pdf−при изменении курса нашего судна ЛОД разворачивается в сторону, противоположную стороне разворота;
−разворот ЛОД (следа послесвечения), если наше судно не маневрировало, указывает на изменение курса цели в сторону разворота;
−эхо-сигнал неподвижной цели всегда перемещается параллельно линии курса нашего судна.
2.Эхо-сигнал перемещается не параллельно курсовой черте:
−через начало развертки − существует опасность столкновения;
−через курсовую линию нашего судна − цель пересекает наш курс;
−по линии, проходящей по корме нашего судна, − наше судно пересечет или уже пересекло курс цели:
•при изменении направления или скорости перемещения эхо-сигнала, если наше судно не маневрировало, глазомерно нельзя сделать однозначного вывода о виде маневра цели. Вид маневра можно установить только с помощью радиолокационной прокладки;
•разворот нашего судна в сторону эхо-сигнала цели приводит к развороту ЛОД от кормы к носу нашего судна;
•уменьшение скорости нашего судна приводит к развороту ЛОД от кормы к носу нашего судна;
•увеличение скорости нашего судна приводит к развороту ЛОД от носа к корме нашего судна;
•отворот нашего судна от эхо-сигнала не позволяет глазомерно оценить эффективность этого маневра (уменьшается относительная скорость сближе-
ния, увеличивается tкр и в результате может произойти резкое изменение направления ЛОД, определяемое только при радиолокационной прокладке).
3.Эхо-сигнал не перемещается − судно-сателлит:
•появление следа послесвечения параллельно курсовой черте − изменение скорости одного или обоих судов;
•изменение курсов одного или обоих судов вызывает появление следа послесвечения, не параллельного курсовой черте.
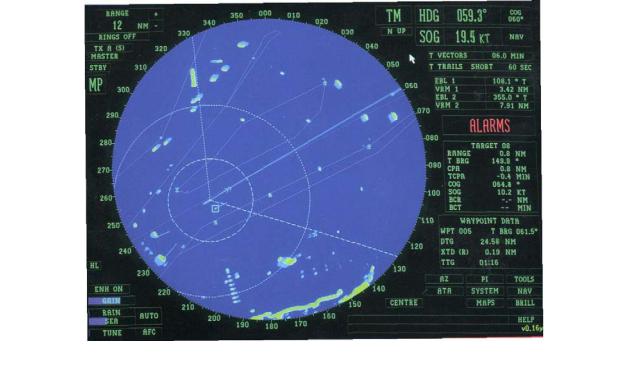
Рис. 16.22. Экран радиолокатора в режиме относительного движения: судно 1 пересекает курс по носу в опасной близости; 2 – следует курсом и скоростью
нашего судна; 3 – пересекает курс по корме; 4 – обгоняющее судно
477
Г. Н. Шарлай. Предупреждение столкновений судов
16.4. ИСПОЛЬЗОВАНИЕ САРП ПРИ РАСХОЖДЕНИИ
Средства автоматической радиолокационной прокладки (САРП) − это радиолокационные информационно-вычислительные комплексы, обеспечивающие автоматизацию обработки радиолокационной информации и информации от гирокомпаса и лага.
При работе с САРП судоводитель освобождается от операции ручного съема радиолокационных пеленгов и дистанций целей и их графической прокладки на радиолокационном планшете. Указанные операции выполняются в автоматическом режиме на экране индикатора. Это позволяет судоводителю уделять основное внимание вопросам наблюдения, оценки ситуации сближения, выбора и выполнения маневра для безопасного расхождения и контроля его эффективности.
В то же время грамотное и полное использование возможностей САРП основано на четком представлении о принципе работы, а, следовательно, функциональных возможностях и ограничениях САРП, а также погрешностях выдаваемой информации в различных ситуациях расхождения и внешних условиях плавания. В противном случае риск столкновения при использовании САРП для расхождения становится существенно выше, чем при ручной радиолокационной прокладке.
Основные функции САРП
Прежде всего, любые САРП выполняют все функции РЛС по отображению на экране радиолокационной обстановки в соответствии с выбранной шкалой дальности и режимом ориентации изображения (рис. 16.23).
Дополнительные, по сравнению с РЛС, функциональные возможности САРП обеспечивают выполнение следующих процедур:
•автоматическое обнаружение эхо-сигналов надводных целей;
•ручной или автоматический захват целей на сопровождение;
•одновременное автоматическое сопровождение не менее 20-ти целей;
•непрерывное автоматическое определение элементов движения (курса и скорости) и элементов сближения (дистанции и времени кратчайшего сближения) для всех сопровождаемых целей;
•проигрывание маневра расхождения со всеми находящимися на автосопровождении целями, при условии, что элементы их движения останутся неизменными;
•обнаружение маневра цели;
•звуковая и световая предупредительная сигнализация о появлении новой и опасной цели; потеря цели, в том числе опасной; начало маневра цели; сближение с целью на установленное предельное расстояние; неисправное функционирование САРП, выявившееся при автоматической тестовой проверке и т. д.
Основные ограничения САРП
Поскольку САРП обеспечивает автоматическую обработку сигналов РЛС, то все ограничения радиолокатора входят как составная часть в ограничения САРП и их необходимо учитывать при расхождении. Это, прежде всего, ограничения, накладываемые используемой шкалой дальности, возможность не обнаружить эхосигналы от малых судов, помехи радиолокационному обнаружению из-за состояния моря, дождя, тумана, теневые секторы и т.д.
478
Алгоритмы обработки информации, реализованные в САРП, накладывают дополнительные ограничения. Основными из них являются следующие.
−Ни одно из существующих САРП не обеспечивает гарантированного обнаружения и захвата на автосопровождение всех целей, в том числе и опасных. Поэтому использование САРП только в режиме автоматического захвата нельзя рассматривать как надлежащее радиолокационное наблюдение.
−При неустойчивом эхо-сигнале (малые суда, сопровождение в условиях помех) может произойти сброс цели и информация по ней выдаваться не будет. При близком расхождении двух целей возможна потеря одной цели. В этом случае другая цель будет иметь два вектора, один из которых будет ложным.
−Сигналы РЛС, гирокомпаса и лага поступают в САРП с погрешностями. При бортовой качке судна, наличии помех, маневрировании и рыскании собственного судна погрешности датчиков увеличиваются. Поэтому при вычислении элементов движения цели и параметров ситуации сближения используется «сглаживание», что приводит к задержке выдачи достоверных данных до трех минут с момента взятия цели на сопровождение.
Рис. 16.23. Экран САРП
•Погрешности вычисленных элементов движения цели и параметров ситуации могут достигать в:
−истинном курсе цели − ±5—7°;
−истинной скорости цели − ±1,2уз;
−дистанции кратчайшего сближения − ±0,7 мили;
−времени кратчайшего сближения − ±1 мин.
•Маневр цели обнаруживается со значительным запозданием, а данные, выдаваемые САРП по маневрирующей цели, будут ненадежны в течение 3−4 минут после его окончания.
•При маневрировании собственного судна выдаваемая САРП информация по всем сопровождаемым целям будет ненадежна.
479

Г. Н. Шарлай. Предупреждение столкновений судов
Использование САРП при расхождении судов
Полная оценка ситуации возможна только с помощью анализа как первичной (необработанные эхо-сигналы целей), так и вторичной (векторы и цифровые данные) информации.
Анализ первичной информации для выбора целей для захвата производится глазомерной оценкой следов послесвечения целей так же, как и при ручной радиолокационной прокладке. В первую очередь, для автоматического сопровождения выбираются опасные и потенциально опасные цели.
По вторичной информации оценивается степень опасности ситуации. При радиолокационном наблюдении с применением САРП судоводитель использует следующие данные для оценки степени опасности ситуации сближения:
−расположение вектора ОД относительно собственного судна;
−значения DKp и tкр;
−курсовой угол, ракурс (в режиме истинного движения) и дистанция до цели;
−характер изменения пеленга на цель.
Дополнительную полезную информацию для оценки ситуации и выбора маневра может дать прогнозирование развития ситуации путем изменения длины векторов цели. При оценке степени опасности ситуации необходимо также учитывать положения правила 7 МППСС-72.
Выбор маневра для безопасного расхождения надлежит осуществлять заблаговременно и решительно в строгом соответствии с МППСС-72, сообразуясь с конкретными обстоятельствами ситуации сближения и условиями плавания и согласно рекомендациям хорошей морской практики. Следует помнить, что даже решительный маневр сможет быть обнаружен другим судном при использовании САПР только через 3−4 минуты после его начала
После выбора маневра расхождения проводится его проигрывание (имитация) в заданное судоводителем время начала маневра (время упреждения). При имитации маневра во всех САРП ситуация рассчитывается только для целей, находящихся на автосопровождении, и предполагается, что все они сохраняют неизменными свой курс и скорость.
При выполнении маневра необходимо внимательно следить за векторами встречных судов, включая индикацию их прошлых положений, с целью как можно более раннего обнаружения их возможного маневра. Необходимо также тщательно контролировать эффективность маневра и в случае необходимости своевременно принимать дополнительные меры обеспечения безопасности. Непрерывный и тщательный контроль за взаимным перемещением судов
необходимо осуществлять до момента возвращения на прежний курс.
480

16.5. ИСПОЛЬЗОВАНИЕ АИС ДЛЯ РАСХОЖДЕНИЯ
Автоматическая идентификационная система (АИС) обеспечивает автоматический обмен навигационной и иной информацией, связанной с безопасностью мореплавания, между судовыми и другими станциями АИС по специальному каналу радиосвязи. Для передачи и приема информации в АИС используется транспондер УКВ диапазона, обеспечивающий дальность действия 25—30 миль в зависимости от высоты антенн.
Одной из причин появления АИС явились имеющиеся ограничения РЛС и САРП для решения задачи предупреждения столкновений судов. Достоинства АИС, устраняющие некоторые из таких ограничений при решении задач по предупреждению столкновений судов, сводятся к следующему:
1.Взаимный обмен координатами, определенными с высокой точностью с помощью GPS или ГЛОНАСС, – 10 м.
2.На работу АИС не влияют осадки и волнение моря, как это имеет место при использовании РЛС, что обеспечивает возможность наблюдения за малыми судами в условиях сильного волнения моря.
3.Предупреждению столкновений судов будет способствовать также взаимный обмен между участниками движения информацией о типе судна, его осадке, размерах и навигационных параметрах, а также о планируемых маневрах. Передача позывных или названия судна предоставляет возможность адресного вызова судна по УКВ в непонятных или опасных ситуациях. При передаче поворотных точек в маршруте плавания судов имеется уникальная возможность учета планируемых маневров и поворотов как собственного судна, так и всех целей.
Наряду с очевидными достоинствами, АИС обладает и существенными не-
достатками. К ним относятся следующие:
1.Эффективное использование АИС возможно только при оснащении всех судов, включая малотоннажные, конвенционной аппаратурой АИС и конвенционной аппаратурой отображения информации от АИС и РЛС, позволяющей решать задачи предупреждения столкновений судов.
2.АИС никогда не заменит РЛС, поскольку ее информация относится только к объектам, на которых установлены транспондеры, в то время как радиолокатор позволяет наблюдать любые объекты, отражающие радиоволны (знаки навигационного ограждения, суда, береговую черту и др.).
3.Внедрению на судах подлежит только то оборудование АИС, параметры которого жестко регламентированы на
международной основе. В этом случае будет обеспечена совместимость оборудования, установленного на разных судах, и высокая эффективность его использования.
4.Судоводители должны принимать во внимание тот фактор, что на встречных судах АИС может выйти из строя или быть выключенной.
На современных судах установлена аппаратура, где на экране одновременно «четыре в одном»:
−РЛС;
−САРП;
−электронная карта;
−АИС.
481