

курсач ЭП
.pdfψ1 U1 i1 R1 dt;
2 L2 ψ1 L1 i1 ;
L12
M |
3 |
i1y 1x i1x 1y ; |
|||||
2 |
|||||||
|
|
|
|
|
|
||
0 |
|
2 |
R' |
M |
|||
3 |
p 2 . |
||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
П |
2 |
|
|
Из-за использования операции интегрирования при вычислении 1 сис-
тема весьма чувствительна к значению активного сопротивления R1 и низко-
частотного дрейфа интегратора.
Проблема, связанная с изменением R1 решается его корректировкой в зависимости от температуры с применением тепловой модели АД.
Уменьшение дрейфа интегратора достигается за счет применения фильтра высоких частот с передаточной функцией
WФ |
|
Т |
ф |
р |
. |
||
|
|
|
|
||||
Тф |
р 1 |
||||||
|
|
|
|||||
Недостатком такого решения является низкая точность определения 1
на низких частотах. Поэтому для обеспечения работоспособности системы на низких частотах, потокосцепление статора заменяют его задающей величиной.
Модель двигателя является важнейшим элементом системы DTC, ее точность определяет выходные параметры электропривода. Идентичность параметров АД и модели устанавливается в результате использования, перед вводом электропривода в промышленную эксплуатацию, специальных иден-
тификационных режимов. Основными параметрами идентифицируемыми в этих режимах являются индуктивность статора L1 и контура намагничивания
L12, сопротивление статора R1 и учет насыщения магнитной цепи.
Используя технические характеристики ряда электроприводов третьего поколения ACS 600 [9] фирмы ABB, приведем сравнительные характеристи-
ки электроприводов с различными типами систем управления (табл. 6.3).
131

|
|
|
|
|
|
Таблица 6.3 |
Сравнительные характеристики систем управления |
|
|||||
|
|
|
|
|
|
|
|
Скалярное |
Векторное |
|
|
|
|
|
управление |
управление с |
DTC |
|
DTC |
|
Тип системы |
U |
|
подчиненным |
|
||
1 f1 const |
(c датчиком |
|
(без датчика |
|||
управления |
|
регулированием |
|
|||
|
(без датчика |
(с датчиком ско- |
скорости) |
|
скорости) |
|
|
|
|
|
|||
|
скорости) |
рости и ШИМ) |
|
|
|
|
Время реакции, мс |
|
150 |
10–20 |
1–2 |
|
1–2 |
Статическая точ- |
|
±(1÷3) |
±0,01 |
±0,01 |
|
±(0,1 – 0,5) |
ность, % |
|
|
||||
|
|
|
|
|
|
|
Динамическая точ- |
|
3 |
0,3 |
0,1 |
|
0,4 |
ность, % |
|
|
||||
|
|
|
|
|
|
|
На основании анализа можно сделать вывод, что принцип прямого управления моментом DTC обеспечивает высокое качество управления даже без использования датчика скорости.
132
Приложения
1. Кинематические схемы, тахограммы работы и технические данные механизмов технологических установок, проектируемых электроприводов
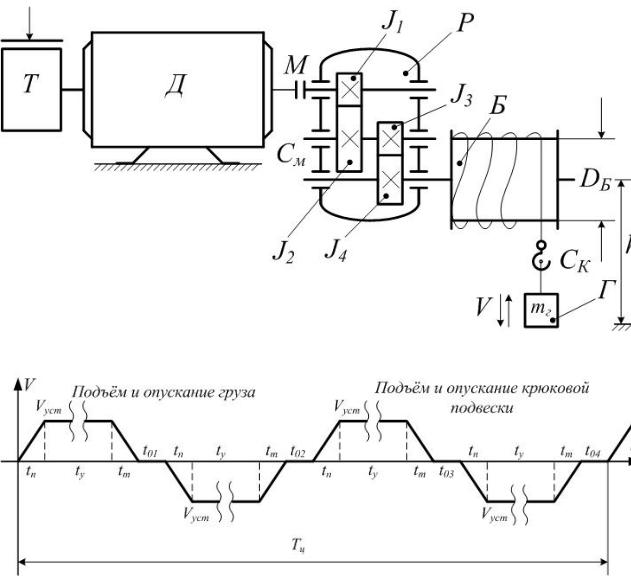
Механизм подъемной лебедки
а)
б)
Рис. П1.1. Кинетическая схема (а)
и тахограмма работы механизма подъемной лебедки (б)
133
Таблица П1.1
Исходные технические данные механизма подъемной лебедки
Параметр |
Един. |
|
|
|
|
Варианты задания |
|
|
|
||||
измер. |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||
|
|
|
|||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
Т |
кг м2 |
0,002 |
0,004 |
0,005 |
0,026 |
0,07 |
0,06 |
0,1 |
0,2 |
0,14 |
0,18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
M |
кг м2 |
0,004 |
0,006 |
0,008 |
0,052 |
0,12 |
0,01 |
0,18 |
0,3 |
0,2 |
0,22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
1 |
кг м2 |
0,001 |
0,002 |
0,004 |
0,01 |
0,06 |
0,07 |
0,08 |
0,09 |
0,06 |
0,08 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
2 |
кг м2 |
0,002 |
0,004 |
0,01 |
0,024 |
0,08 |
0,08 |
0,1 |
0,1 |
0,08 |
0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J 3 |
кг м2 |
0,0015 |
0,0025 |
0,006 |
0,015 |
0,07 |
0,09 |
0,09 |
0,1 |
0,07 |
0,09 |
||
J |
4 |
кг м2 |
0,003 |
0,006 |
0,013 |
0,03 |
0,15 |
0,12 |
0,12 |
0,12 |
0,1 |
0,13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Jб |
кг м2 |
2,2 |
2,8 |
3,0 |
3,5 |
3,8 |
4,0 |
4,5 |
4,8 |
4,5 |
4,6 |
||
Д б |
м |
0,5 |
0,5 |
0,6 |
0,6 |
0,8 |
0,8 |
0,7 |
0,7 |
0,5 |
0,5 |
||
Z1 |
– |
15 |
15 |
20 |
20 |
10 |
10 |
15 |
15 |
20 |
20 |
||
Z2 |
– |
84 |
84 |
120 |
120 |
64 |
64 |
90 |
90 |
100 |
100 |
||
Z3 |
– |
10 |
10 |
18 |
18 |
10 |
10 |
12 |
12 |
12 |
12 |
||
Z4 |
– |
56 |
56 |
108 |
108 |
64 |
64 |
72 |
72 |
60 |
60 |
||
CM |
Н м 10 |
4 |
|
5 |
7 |
4 |
4 |
6 |
10 |
10 |
2 |
15 |
|
|
4 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
CK |
Н / м 108 |
4 |
5 |
3 |
2 |
4 |
6 |
6 |
1 |
1,2 |
|||
|
3 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
mГ |
кг 103 |
0,15 |
0,3 |
0,5 |
1,0 |
1,5 |
1,75 |
2,0 |
2,5 |
2,75 |
3,0 |
||
тПК К тГ |
– |
0,2 |
0,2 |
0,3 |
0,3 |
0,35 |
0,35 |
0,2 |
0,2 |
0,3 |
0,3 |
||
|
– |
0,85 |
0,87 |
0,85 |
0,8 |
0,85 |
0,86 |
0,85 |
0,86 |
0,87 |
0,88 |
||
Vуст |
м/с |
0,8 |
1,2 |
1,25 |
2,5 |
0,75 |
1,25 |
1,0 |
2,8 |
1,4 |
1,0 |
||
h |
м |
8 |
10 |
15 |
15 |
10 |
15 |
15 |
20 |
15 |
10 |
||
tП=tТ |
с |
0,1 |
0,1 |
0,15 |
0,15 |
0,2 |
0,2 |
0,2 |
0,2 |
0,15 |
0,15 |
||
t01=t02=t03=t04 |
с |
2 |
2 |
3 |
3 |
2 |
3 |
3 |
4 |
3 |
2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
рад |
|
|
|
Зазор, приведенный к валу двигателя |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
n |
об/мин |
966 |
1449 |
1433 |
2866 |
734 |
1224 |
982 |
2751 |
1337 |
955 |
||
P |
кВт |
1,4 |
4,13 |
7,35 |
31,25 |
13,2 |
25,4 |
23 |
81,4 |
44,2 |
34 |
||
3 – задается преподавателем.
134
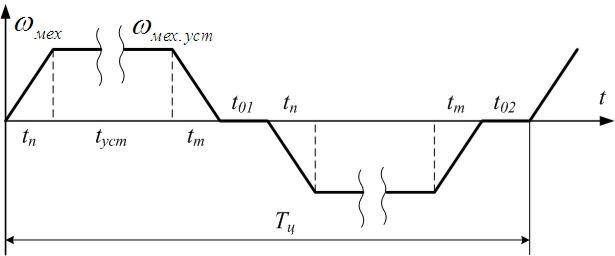
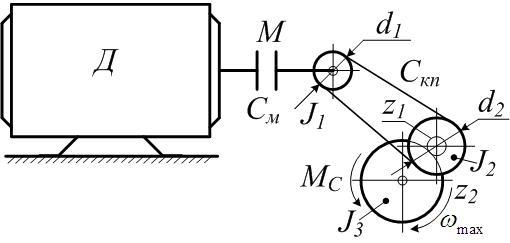
Механизм поворотного круга
 а)
а)
б)
Рис. П1.2. Кинематическая схема (а)
и тахограмма работы механизма поворотного круга (б)
135
Таблица П1.2
Исходные технические данные механизма поворотного круга
Параметр |
Един. |
|
|
|
Варианты задания |
|
|
|
||||
измер. |
|
|
|
|
|
|
|
|
|
|
||
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
JM JТ |
кг м2 |
0,003 |
0,004 |
0,003 |
0,004 |
0,06 |
0,008 |
0,01 |
0,012 |
0,01 |
0,1 |
|
J1 |
кг м2 |
0,002 |
0,003 |
0,0015 |
0,002 |
0,02 |
0,004 |
0,05 |
0,006 |
0,005 |
0,05 |
|
J 2 |
кг м2 |
0,01 |
0,02 |
0,015 |
0,01 |
0,1 |
0,02 |
0,12 |
0,15 |
0,14 |
0,5 |
|
J 3 |
кг м2 |
10 |
15 |
12 |
13 |
20 |
15 |
25 |
26 |
25 |
30 |
|
Cм |
Н м 104 |
5 |
6 |
4 |
3 |
6 |
8 |
10 |
7 |
6 |
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cкп |
Н м 106 |
4 |
5 |
6 |
7 |
9 |
8 |
7 |
6 |
5 |
4 |
|
d1 |
м |
0,1 |
0,1 |
0,15 |
0,15 |
0,2 |
0,2 |
0,25 |
0,25 |
0,3 |
0,3 |
|
d2 |
м |
0,5 |
0,5 |
0,75 |
0,75 |
1,0 |
1,0 |
1,25 |
1,25 |
1,5 |
1,5 |
|
Z1 |
– |
21 |
21 |
25 |
25 |
24 |
24 |
20 |
20 |
25 |
25 |
|
Z2 |
– |
210 |
210 |
250 |
250 |
192 |
192 |
160 |
160 |
250 |
250 |
|
|
– |
0,8 |
0,8 |
0,85 |
0,85 |
0,87 |
0,87 |
0,88 |
0,88 |
0,9 |
0,9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мех |
с-1 |
1,5 |
2,0 |
3,0 |
6,0 |
1,85 |
2,5 |
2,5 |
3,75 |
3,0 |
6,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мс |
Н м |
400 |
500 |
550 |
600 |
1000 |
1000 |
1500 |
1500 |
1500 |
2000 |
|
|
гр |
360 |
720 |
800 |
1080 |
400 |
720 |
720 |
1080 |
1000 |
2100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tП=tТ |
с |
0,2 |
0,2 |
0,25 |
0,2 |
0,25 |
0,2 |
0,25 |
0,15 |
0,15 |
0,2 |
|
t01=t02 |
с |
1,5 |
2,0 |
2,5 |
3 |
1,5 |
2,0 |
2,0 |
2,5 |
2,5 |
4 |
|
М с.о К М с |
Н м |
0,7 |
0,7 |
0,8 |
0,8 |
0,75 |
0,6 |
0,65 |
0,7 |
0,7 |
0,75 |
|
3 |
рад |
|
|
Зазор, приведенный к валу двигателя |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 – задается преподавателем.
136
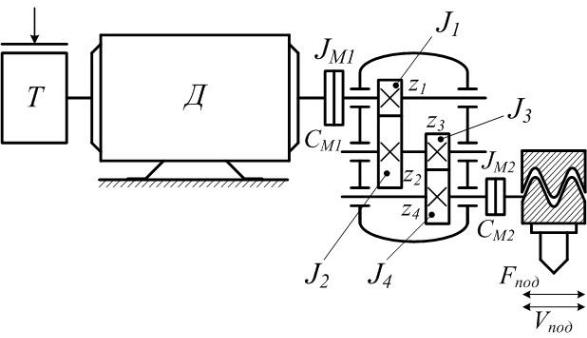
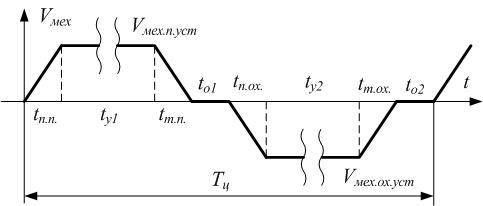
Механизм подачи
 а)
а)
 б)
б)
Рис. П1.3. Кинематическая схема (а) и тахограмма работы механизма подачи (б)
137

Таблица П1.3
Исходные технические данные механизма подачи станка
Параметр |
|
Един. |
|
|
|
Варианты задания |
|
|
|
|||
|
измер. |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
||||||||||
1 |
|
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
JМ 1 JТ |
|
кг м2 |
0,002 |
0,004 |
0,006 |
0,002 |
0,003 |
0,006 |
0,002 |
0,004 |
0,005 |
0,006 |
J1 |
|
кг м2 |
0,001 |
0,002 |
0,002 |
0,001 |
0,0015 |
0,0025 |
0,001 |
0,002 |
0,0025 |
0,003 |
J 2 |
|
кг м2 |
0,003 |
0,0025 |
0,005 |
0,002 |
0,003 |
0,0045 |
0,0025 |
0,008 |
0,007 |
0,009 |
J 3 |
|
кг м2 |
0,002 |
0,002 |
0,003 |
0,0015 |
0,002 |
0,003 |
0,002 |
0,006 |
0,005 |
0,007 |
J 4 |
|
кг м2 |
0,008 |
0,01 |
0,001 |
0,005 |
0,008 |
0,01 |
0,009 |
0,02 |
0,015 |
0,03 |
J М 2 |
|
кг м2 |
0,02 |
0,025 |
|
0,015 |
0,02 |
0,03 |
0,025 |
0,05 |
0,045 |
0,06 |
m |
|
кг |
350 |
350 |
400 |
150 |
80 |
250 |
300 |
50 |
250 |
300 |
CM1 |
|
Н м 104 |
5 |
6 |
4 |
10 |
8 |
6 |
7 |
5 |
4 |
6 |
CM2 |
|
Н м 105 |
15 |
12 |
13 |
18 |
16 |
15 |
16 |
11 |
10 |
13 |
Z1 |
|
– |
11 |
13 |
15 |
17 |
15 |
21 |
19 |
17 |
15 |
21 |
Z2 |
|
– |
44 |
39 |
55 |
59 |
53 |
83 |
65 |
51 |
53 |
63 |
Z3 |
|
– |
19 |
21 |
21 |
23 |
25 |
21 |
23 |
21 |
19 |
23 |
Z4 |
|
– |
39 |
43 |
47 |
69 |
59 |
53 |
69 |
58 |
53 |
71 |
t |
|
м |
0,01 |
0,015 |
0,02 |
0,02 |
0,02 |
0,02 |
0,025 |
0,03 |
0,03 |
0,03 |
пер |
|
– |
0,85 |
0,85 |
0,87 |
0,9 |
0,91 |
0,9 |
0,85 |
0,92 |
0,83 |
0,84 |
V |
|
м/с |
0,01 |
0,01 |
0,01 |
0,015 |
0,02 |
0,025 |
0,03 |
0,03 |
0,025 |
0,04 |
FП |
|
Н 103 |
22 |
22,5 |
30 |
17 |
10 |
35 |
32,5 |
7,5 |
18 |
22,5 |
К Vох /VП |
|
– |
2,5 |
2,5 |
3 |
3 |
3,5 |
3,5 |
3 |
3 |
2,5 |
2,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
tп.п = tт.п |
|
с |
0,2 |
0,2 |
0,25 |
0,25 |
0,2 |
0,2 |
0,4 |
0,4 |
0,2 |
0,2 |
tп.ох = tт.ох |
|
с |
0,5 |
0,5 |
0,75 |
0,75 |
0,7 |
0,7 |
1,2 |
1,2 |
0,5 |
0,5 |
l |
|
м |
0,2 |
0,2 |
0,25 |
0,25 |
0,3 |
0,3 |
0,35 |
0,35 |
0,4 |
0,4 |
3 |
|
рад |
|
|
Зазор, приведенный к валу двигателя |
|
|
|||||
3 |
– задается преподавателем. |
|
|
|
|
|
|
|||||
138
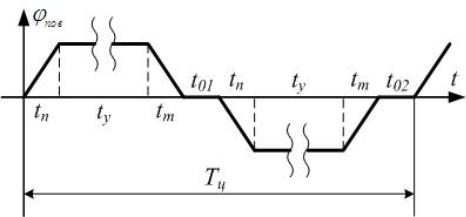
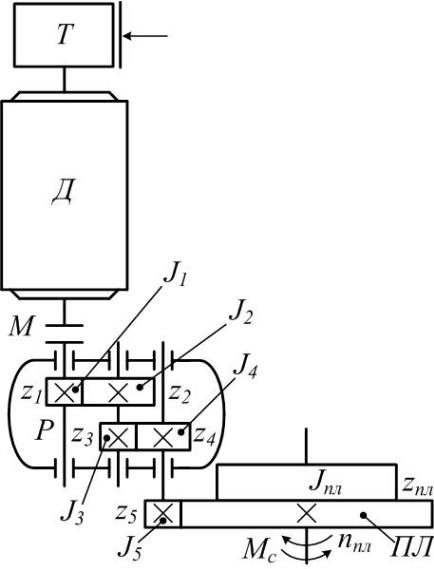 а)
а)
б)
Рис. П1.4. Кинематическая схема (а)
и тахограмма работы (б) механизма поворота
139
Таблица П1.4
Исходные технические данные механизма поворота
Параметр |
Един. |
|
|
|
Варианты задания |
|
|
|
|||
измер. |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
|
|
|
|
|
|
|
|
|
|
JM JТ |
кг м2 |
0,002 |
0,004 |
0,006 |
0,008 |
0,016 |
0,022 |
0,03 |
0,002 |
0,004 |
0,006 |
J1 |
кг м2 |
0,001 |
0,002 |
0,003 |
0,004 |
0,007 |
0,01 |
0,012 |
0,001 |
0,002 |
0,0025 |
J 2 |
кг м2 |
0,004 |
0,007 |
0,01 |
0,015 |
0,03 |
0,04 |
0,06 |
0,006 |
0,007 |
0,01 |
J 3 |
кг м2 |
0,006 |
0,015 |
0,02 |
0,03 |
0,01 |
0,016 |
0,02 |
0,025 |
0,01 |
0,012 |
J 4 |
кг м2 |
0,01 |
0,02 |
0,06 |
0,09 |
0,03 |
0,033 |
0,042 |
0,05 |
0,03 |
0,04 |
J 5 |
кг м2 |
0,015 |
0,04 |
0,1 |
0,12 |
0,15 |
0,17 |
0,18 |
0,2 |
0,1 |
0,12 |
J ПЛ |
кг м2 |
360 |
200 |
400 |
600 |
500 |
450 |
800 |
300 |
400 |
450 |
CM |
Н м 104 |
4 |
5 |
6 |
6 |
10 |
10 |
0 |
5 |
6 |
7 |
CЗШ |
Н м 105 |
10 |
10 |
12 |
15 |
20 |
30 |
40 |
10 |
12 |
15 |
Z1 |
– |
13 |
15 |
12 |
19 |
21 |
17 |
15 |
13 |
11 |
9 |
Z2 |
– |
44 |
41 |
35 |
59 |
63 |
41 |
50 |
37 |
30 |
19 |
Z3 |
– |
11 |
9 |
13 |
13 |
15 |
17 |
15 |
11 |
13 |
17 |
Z4 |
– |
29 |
23 |
37 |
39 |
72 |
47 |
53 |
56 |
45 |
62 |
Z5 |
– |
11 |
9 |
9 |
8 |
19 |
13 |
19 |
21 |
15 |
17 |
ZПЛ |
– |
75 |
55 |
65 |
63 |
81 |
79 |
101 |
113 |
99 |
111 |
nПЛ |
об/мин |
40 |
30 |
16 |
10 |
40 |
30 |
15 |
9 |
12 |
28 |
Мс |
Н м |
300 |
400 |
750 |
1100 |
1400 |
1300 |
2800 |
250 |
600 |
650 |
пер |
– |
0,85 |
0,85 |
0,84 |
0,83 |
0,82 |
0,8 |
0,82 |
0,85 |
0,84 |
0,85 |
tП=tТ |
с |
0,2 |
0,2 |
0,2 |
0,25 |
0,4 |
0,3 |
0,4 |
0,2 |
0,2 |
0,25 |
t01’=t02 |
с |
2 |
2 |
2,5 |
2,5 |
3,0 |
3,0 |
3,0 |
2 |
2 |
2 |
пов |
гр |
360 |
360 |
360 |
360 |
360 |
360 |
360 |
360 |
360 |
360 |
М с.о К М с |
Н м |
0,55 |
0,6 |
0,6 |
0,65 |
0,65 |
0,7 |
0,7 |
0,65 |
0,65 |
0,6 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
рад |
|
|
Зазор, приведенный к валу двигателя |
|
|
|||||
3 – задается преподавателем.
140