

курсач ЭП
.pdf
|
|
X |
|
|
|
|
|
||
|
|
2 |
|
|
|
|
i1 Х |
i1 |
|
|
|
|
I1 |
|
|
|
|
Y |
|
' |
' |
|
i1 у |
|
i2 |
i2 y |
i1 |
||
|
||||
|
|
|
||
|
|
|
|
Рис. 5.1. Неподвижная α–β и вращающаяся система координат х–у при ориентации вектора потокосцепления ротора по оси х
При изменении одной из составляющих вектора тока i1 происходит из-
менение другой составляющей. Поэтому для реализации возможности неза-
висимого регулирования потокосцепления ротора 2 и электромагнитного момента, необходимо исключить взаимную зависимость составляющих i1 x и
i1 y вектора тока статора i1 , вводя компенсирующие сигналы. Компенсирую-
щие сигналы определим на основании анализа математической модели экви-
валентного двухфазного АД в осях х–у при ориентации 2 по оси х:
U |
|
i |
|
R |
d 1x |
|
|
|
|
; |
||||||||||
|
|
|
|
|||||||||||||||||
|
1x |
|
|
1x |
|
1 |
|
|
|
|
dt |
|
|
|
|
0эл |
1у |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 1y |
|
|
|
|
|
|
|
||||
|
|
|
i1y R1 |
|
|
0эл 1x ; |
||||||||||||||
U1y |
|
|
|
|
|
|||||||||||||||
|
|
dt |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2 x |
|
|
|
|
|
|
|
|
|||||
0 i' |
R' |
|
; |
|
|
|
|
|
|
(5.1) |
||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
2 y |
|
2 |
|
|
|
dt |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 i' |
R' |
|
|
0ЭЛ |
|
ЭЛ |
2 x |
; |
||||||||||||
|
|
|
2 y |
|
2 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
L12 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
M |
p |
|
|
|
i . |
|
|
|
|
|
|||||||||
|
|
|
' |
|
|
|
|
|
|
|||||||||||
|
|
|
|
П |
|
|
|
|
|
2 x 1y |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
L2 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
71

Проекции векторов потокосцеплений статора и ротора на оси х–у:
|
1х |
L i |
L i' |
; |
|
|
1 y |
L i |
L i' |
; |
|
||
|
|
1 1x |
12 2 x |
|
|
|
1 1 y |
|
12 2 y |
|
|
||
|
|
|
L' i' |
L i |
|
|
|
0 L' |
i' |
L i |
(5.2) |
||
2 х |
; |
2 y |
. |
||||||||||
|
2 2 x |
12 1x |
|
|
|
2 2 y |
12 1 y |
|
|||||
Для определения зависимостей между переменными 2 и i1 исключим из
уравнений (5.1) переменные |
1x |
, |
1 y |
, |
i' |
, i' |
. Выразив из (5.2) токи i' |
и i' |
|||||||
|
|
|
|
|
|
|
2 x |
2 y |
|
|
|
2 x |
2 y |
||
i2' x |
1 |
2 |
L12i1x ; |
|
|
|
|
|
i2' y |
|
L12 |
i1 y , |
(5.3) |
||
|
|
|
|
|
|
|
|||||||||
|
L2 |
|
|
|
|
|
|
|
|
|
|
L2 |
|
||
получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1x |
L1i1x |
k2 2 ; |
|
|
|
(5.4) |
|||||
|
|
|
|
|
1 y |
L1i1 y , |
|
|
|
|
(5.5) |
||||
где 1 L212 |
L L |
|
коэффициент рассеяния магнитного поля АД; |
|
|||||||||||
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
k2 L12 L2 коэффициент электромагнитной связи ротора.
При подстановке (5.4, 5.5) в уравнения электрического равновесия цепи статора они примут вид:
U |
i R L |
di1x |
|
k |
|
|
d 2 x |
|
|
L i |
; |
|
|
|||||||||
|
2 |
|
|
|
|
|
|
|||||||||||||||
1x |
|
1x 1 |
1 |
dt |
|
|
dt |
|
|
|
0эл |
1 1y |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.6) |
|||||
|
|
|
|
|
di1y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
U |
i R L |
|
|
L i |
|
|
|
k |
|
. |
|
|||||||||||
|
|
|
0эл |
|
|
|||||||||||||||||
1y |
|
1y 1 |
1 |
dt |
|
|
|
0эл |
|
1 1x |
|
|
2 2 x |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Связь частоты роторной ЭДС с током i1 y |
|
и 2 |
получим из уравнения элек- |
|||||||||||||||||||
трического равновесия цепи ротора по оси у (5.1) при подстановке i2' |
y из (5.3): |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
k |
|
R' i |
|
|
|
|
|
(5.7) |
||||||
|
р |
0 эл |
эл |
|
2 |
|
2 |
1 y |
2 . |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
72
При записи уравнений (5.6) в операторной форме они имеют вид: |
||||||||||||||||||||||||||
U1x p i1x p R1 T1 p 1 k2 p 2 x p 0эл L1i1y p ; |
|
|
|
|||||||||||||||||||||||
U |
1y |
p i |
p R |
T p 1 |
L i |
p |
0эл |
k |
p ; |
|
|
|
||||||||||||||
|
|
|
|
1y |
|
|
1 |
|
1 |
|
|
|
0эл |
|
1 1x |
|
|
|
2 2 x |
|
|
|
|
|||
|
|
|
|
|
|
p L |
i |
p ; |
|
p |
k R' i |
p |
|
|
; |
|
|
(5.8) |
||||||||
T p 1 |
|
|
2 |
2 1y |
|
|
|
2 x p |
|
|
||||||||||||||||
|
|
1 |
|
|
2 x |
|
|
|
12 1x |
|
P |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
3 p |
|
|
|
p ; M p |
M |
|
p J |
|
p p . |
|
|
|
|
|||||||||
M p |
П |
k |
2 x |
C |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
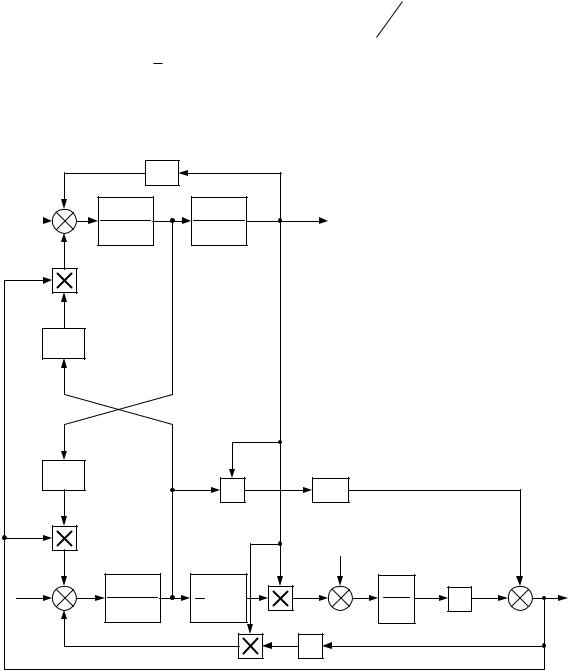
Структурная схема АД, соответствующая уравнениям (5.8) приведена |
||||||||||||||||||||||||||
на рис. 5.2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
U1 x |
1 / R1 |
|
i1 х |
|
L12 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
T1 р 1 |
|
|
|
T2 р 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оэл |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T1R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T1R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 R2' |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
оэл |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
М с |
|
|
|
|
|
|
р |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
i1 у 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
U1 у |
|
1 / R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
эл |
|
оэл |
||||
|
|
|
1 |
|
|
|
|
|
pП К2 |
|
|
|
|
|
|
|
|
|
|
|
pП |
|
||||
|
T1 р |
1 |
|
|
|
2 |
|
|
М |
|
|
|
J |
|
р |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К2 |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.2. Структурная схема АД при ориентировании вектора |
|
|
||||||||||||||||||||||||
|
|
|
|
потокосцепления ротора по оси х |
|
|
|
|
||||||||||||||||||
В структурной схеме рис. 5.2 в качестве управляющих воздействий применяются составляющие напряжений U1x и U1 y , а частота 0 эл не рас-
73

сматривается как управляющее воздействие и определяется через скорость двигателя и частоту роторной ЭДС р .
Из структурной схемы видно, что имеют место перекрестные связи по проекциям векторов токов статора i1 x , i1 y . Если тем или иным способом све-
сти к минимуму влияние этих перекрестных связей, то, задавая значения U1x ,
можно независимо регулировать потокосцепление ротора 2 . При данном 2
сигнал задания U1 y будет определять значение электромагнитного момента и скорости двигателя. Таким образом, задачи управления потокосцеплением ро-
тора и электромагнитным моментом будут разделены, подобно тому, как это имеет место в двигателях постоянного тока с независимым возбуждением.
Устранение влияния перекрестных связей достигается в системах ЧТУ при непосредственном управлении током статора. Из структурной схемы,
при питании двигателя от источника тока, приведенной на рис. 5.3 видно, что потокосцепление ротора однозначно определяется составляющей тока стато-
ра по оси i1 x . |
|
|
|
|
|
i |
|
|
2 |
|
1x |
|
L12 |
|
|
|
|
T2 р 1 |
|
|
|
|
|
|
i1 у |
3 |
pП |
К2 |
M |
|
2 |
|
||
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
C |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
р |
|
||
|
|
|
|
|
|
ЭЛ |
|
0ЭЛ |
||
|
|
|
|
|
|
|||||
|
1 |
|
||||||||
|
|
pП |
||||||||
|
J р |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
Рис. 5.3. Структурная схема АД при управлении током статора при ориентации вектора потокосцепления ротора по оси х
В переходном режиме изменение потокосцепления 2 характеризуется постоянной времени ротора Т 2 . Электромагнитный момент при постоянстве
2 определяется только значением составляющей тока i1 y и без замедления
74

следует за ее изменениями. То есть момент изменяется так быстро, как быст-
ро изменяется составляющая тока i1 y , что способствует обеспечению высо-
кого быстродействия электропривода с АД.
Таким образом, структурная схема АД при векторном управлении, как видно из рис. 5.4, оказывается практически такой же, как структурная схема двигателя постоянного тока независимого возбуждения (ДПТНВ).
|
|
i1x |
|
L12 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
T2 р 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
i1 у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
3 |
pП |
К2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J р |
|
|
|
||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MC
а)
iв |
|
|
1 |
ф |
КФ |
|
|
||
|
TВ |
р 1 |
|
|
|
|
|
iЯ |
К |
M |
|
Д |
MС
1
J р
б)
Рис. 5.4. Сравнительные структурные схемы АД п ри векторном управлении (а) и ДПТНВ (б)
На рис. 5.4 показаны части структурных схем АД при векторном управлении
(рис. 5.4 а) и ДПТНВ (рис. 5.4 б). Здесь kф коэффициент связи потока воз-
буждения Ф с током возбуждения iв . Составляющая тока i1 x в АД с вектор-
ным управлением играет ту же роль, что и ток возбуждения в ДПТНВ, Т 2 эк-
вивалентна постоянной времени цепи возбуждения Т в , а коэффициент
75

32 рП k2 соответствует конструктивному коэффициенту двигателя постоянно-
го тока kд = kФ.
5.1. Система полярного частотно-токового управления при под-
держании потокосцепления ротора
Выражения, определяющие количественные соотношения, обеспечи-
вающие поддержание 2 const, при ЧТУ, получим из уравнений роторной цепи короткозамкнутого АД в осях х, у k 0 эл .
Поставив цель поддержания 2 , совместим его с осью х, при этом
2 x |
2 max , 2 y |
0 , с учетом |
d |
2 x |
dt |
|
d 2 y |
dt |
0 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
0 i' |
R' |
|
|
d 2 x |
|
|
|
|
|
|
|
|
|
; |
|
|
|||||||||
|
|
|
|
|
|
0эл |
эл |
2 у |
|
|
|||||||||||||||||
|
|
|
|
|
2 x |
2 |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
' |
|
' |
|
|
|
2 y |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
0 i |
2 y |
R |
|
|
|
|
|
|
0эл |
|
эл |
2 x |
; |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
(5.9) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
pП |
L |
|
|
|
2 xi1y 2 yi1x ; |
|
|
|
|
|
|
|||||||||||||
|
|
M |
12 |
|
|
|
|
|
|
||||||||||||||||||
|
|
L' |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L i |
|
|
L i |
|
|
; |
|
|
L i |
L i |
|
. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
' |
|
|
|
|
|
|
|
|
|
|
' |
' |
|
|
|
2 x |
|
|
12 1x |
|
|
2 2 x |
|
2 y |
12 1y |
|
|
2 2 y |
|
||||||||||||
|
Получим из (5.9) соотношения для определения составляющих токов |
||||||||||||||||||||||||||
i1 x , i1 y , тока 1 max |
и угла нагрузки 1 |
вектора тока i1 [3,7]. |
|||||||||||||||||||||||||
76

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ Uс , fс |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оэл |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
i1х |
|
2 max |
|
|
|
|
2 max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UУТ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
L12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПЧ |
|
|
|
U |
УФТ |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(ИТ) |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
i1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UУЧ |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1max KУТUУТ |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 KУФUУФТ |
|||
|
|
|
|
i1 у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f1 KУЧ UУЧ |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
АД |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
const (а) и схема АД с ЧТУ |
|||||||||||||||||||||||||||||||
|
|
Рис. 5.5. Векторная диаграмма при 2 |
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
i |
2 max ; i |
|
|
T2 |
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0эл |
эл |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1x |
|
L12 |
|
|
1y |
|
|
|
L12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i12x i12y |
|
|
|
|
|
1 T22 02ЭЛ Н Sa2 ; |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
I1max |
|
|
|
|
2 max |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.10) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
arctg |
1y |
arctg T |
|
|
|
|
S |
|
arctg |
Р X 2 |
; |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0ЭЛ Н |
а |
' |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
i1x |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
M p |
П |
k |
|
|
|
i |
; M |
|
0 |
, |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 max 1y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где |
Sa |
|
|
; |
p2 2 |
|
|
|
– абсолютное скольжение и жесткость механиче- |
||||||||||||||||||||||||||||||||||||||
|
|
0 |
|
|
|
' |
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
П 2 max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
0н |
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2 |
|
const. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
ской характеристики при |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
Векторная диаграмма, соответствующая полученным соотношениям, |
||||||||||||||||||||||||||||||||||||||||||||
приведена на рис. 5.5 а. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
Она показывает, что составляющая тока i1 x |
|
является намагничиваю- |
||||||||||||||||||||||||||||||||||||||||||
|
|
2 const, |
|
i1x |
const . Составляющая тока i1 y представ- |
||||||||||||||||||||||||||||||||||||||||||
щим током и при |
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
77 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||

ляет собой активный ток, которому при 2 const пропорционален момент двигателя. Следовательно, при ЧТУ система управления преобразователем должна обеспечивать возможность формирования амплитуды тока статора1 max и его аргумента 1 (5.10).
Поэтому преобразователь частоты ПЧ (ИТ) (рис. 5.5 б) снабжается кроме входов управления амплитудой UУТ и частотой тока UУЧ также входом управления фазой тока UУФТ.
Из выражения угла нагрузки 1 (5.10) видно, что сдвиг вектора i1 от-
носительно 2 однозначно определяется значением частоты роторной ЭДС,
т.е. значением момента нагрузки на валу двигателя. Поэтому согласно рис. 5.5 а, угол поворота вектора тока статора относительно неподвижной системы координат определяется как сумма углов
t |
|
0 1 0элtdt , |
(5.11) |
0 |
|
где 0 текущее значение угла поворота пространственного вектора 2 от-
носительно неподвижной системы координат .
Поэтому, согласно (5.10) выражение, связывающее модули тока стато-
ра и потокосцепления ротора |
|
|
|
|
|
|
|
|
|
|
ψ2max |
|
|
|
|
|
|
|
Ι |
1 ω T |
2 . |
(5.12) |
||||
|
1max |
|
L12 |
|
p 2 |
|
|
|
|
|
|
|
|
|
|
||
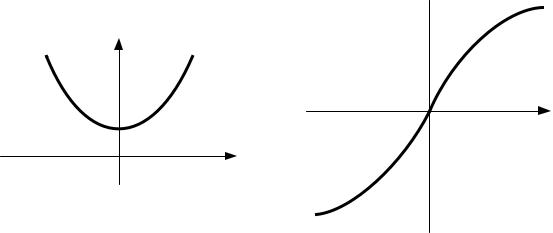
Характер зависимостей I1max = f( Р) = f(Sa) – функциональный преобра- |
||||||||
зователь ФП1 и 1 |
= f( Р) = f(Sa) – функциональный преобразователь ФП2 |
|||||||
показан на рис. 5.6. |
|
|
|
|
|
|
|
|
78
 1
1
I1max
p ( Sa )
p ( Sa )
а) б)
Рис. 5.6. Характеристики функциональных преобразователей ФП1 (а) ФП2 (б)
Функциональная схема системы полярного частотно-токового управ-
ления приведена на рис. 5.7. Здесь на входах релейных регуляторов тока РТА, РТВ, РТС формируются сдвинутые на 120 эл. градусов синусоидальные сигналы задания токов статора i3 A ,i3 B , i3C , подаваемые с генератора синусои-
дальных колебаний (ГСК).
В блоке выделения ЭДС статора (БВЭ) по значениям напряжения
U A ,U B ,UC и токов iA ,iB ,iC рассчитывается противо – ЭДС статора. Компен-
сирующие сигналы пропорциональные ЭДС статора с блока БВЭ суммиру-
ются с выходными сигналами регуляторов тока, устраняя влияние противо– ЭДС на точность поддержания тока.
Система замкнута по скорости через регулятор скорости РС. На входе РС сравниваются между собой сигнал задания скорости U ЗС и сигнал обрат-
ной связи по скорости UОС kOC . Сигнал задания частоты формируется следующим образом: сигнал датчика скорости (ДС) умноженный на число пар полюсов АД ( kOC pП ), и подается со знаком «плюс» на сумматор на выходе РС.
79

80
ФП1
Sa |
ФП 2 |
РС 1 / ОЭП .Н
|
UУЧ |
ЭП |
ОЭП |
U ос |
ЭП |
И |
0 |
KОС |
|
pП |
UУ .Т ( I1MAX |
) |
|
|
|
|
|
|
|
~ |
|
|
ГСК |
|
|
i3 А |
|
РТА |
|
U А |
|
|
sin( 0 1 ) |
|
|
|
|
||||||
|
|
|
|
i |
|
РТВ |
eА |
|
A |
|
|
|
|
|
|
А |
|
|
Ш |
|
|
|
1 |
|
2 |
i3 В |
|
|
|
U В И В ПЧ |
||
sin 0 |
|
|
|
|
|
|
|
(ИН) |
||
|
|
|
3 |
iВ |
|
eВ |
|
М С |
||
UУ .ФТ |
|
|
|
РТС |
|
|
||||
|
|
|
i3С |
|
|
U |
|
|
||
|
|
|
2 |
|
|
|
С |
|
||
sin 0 1 |
3 |
iС |
|
|
|
|
|
|||
|
|
|
|
|
e |
|
|
|
||
|
|
|
|
|
|
|
С |
|
|
|
U А
БВЭ U В UС
|
iА |
|
iВ |
|
iС |
ДТА |
|
|
|
|
|||||
|
|
|
|
|
|
ДТВ |
|
|
|
|
|
|
|
|
|
ДТС
ДС |
М |
Рис. 5.7. Функциональная схема системы полярного частотно-токового управления с поддержанием потокосцепления ротора в установившемся режиме