

lk
.pdfr f 2 r2 h f 2 m( z22 ha* c* x2 ) .
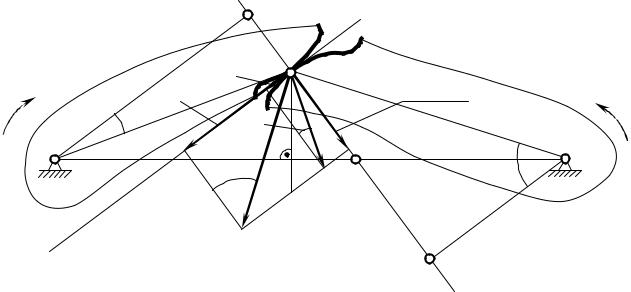
6.9 Дуга зацепления. Коэффициент перекрытия
N-N – линия зацепления, АВ – теоретический участок, аb – активный участок линии зацепления (рисунок 80).
Путь, пройденный точкой за время зацепления, измеренный по дуге начальной окружности, называется дугой зацепления
а1b1 a2b2 .
Так как центральные углы, стягивающие дуги mn и a1b1, равны (угловой шаг одинаков), то отношение дуг равно отношению их радиусов
а1b1 |
rW 1 |
|
rb1 |
|
|
|
1 |
, откуда |
|
||||
mn |
|
r |
|
|
r |
cos |
W |
|
cos |
W |
|
||
|
|
|
b1 |
|
|
b1 |
|
|
|
|
|
||
a b mn . |
|
|
|
|
|
|
|
||||||
1 |
1 |
|
cos W |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
По третьему свойству эвольвенты тп ab, откуда |
|
||||||||||||
a1b1 |
|
аb |
|
. |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
cos |
W |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
rb1 |
|
А |
|
а1 |
|
|
|
||
|
|
|
|
|
m |
|
|
b1 |
|
|
|||
|
|
|
|
|
|
|
a |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
р |
2 |
О2 |
О1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
rW1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а2 b2 |
b |
|
||
|
|
|
|
|
|
|
|
|
В |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
Рисунок 80 – Дуга зацепления |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
111 |

Отношение дуги зацепления к шагу по начальной окружности, называется коэффициентом перекрытия – ε.
|
a1b1 |
|
|
|
ab cos w |
|
ab |
, |
|||
|
|
|
|
|
|
||||||
pw |
cos w m cos |
m cos |
|||||||||
|
|
|
|
||||||||
|
ab |
|
|
|
. |
|
|
(53) |
|||
|
|
|
|
|
|
||||||
m cos |
|
|
|||||||||
|
|
|
|||||||||
При графическом определении коэффициент перекрытия должен быть больше или равен 1,1.
6.9.1 Аналитическое определение коэффициента перекрытия
Рабочий участок линии зацепления (рисунок 80). ab ap pb (aB pB) ( Ab Ap) ,
аВ (О |
a)2 |
(О |
В)2 |
r 2 |
r 2 |
, |
|||
2 |
|
2 |
|
|
a2 |
b2 |
|
||
pB pO2 sin W rW 2 sin W , |
|
|
|
||||||
|
|
|
|
|
|
|
|
||
Ab (О b)2 |
(О A)2 |
r 2 |
r 2 |
, |
|||||
1 |
|
1 |
|
|
a1 |
b1 |
|
||
Ap pO1 sin W rW 1 sin W .
Подставив значения отрезков в формулу коэффициента перекрытия получается, что
|
r 2 |
r 2 |
|
r 2 |
r 2 |
(r |
r |
)sin |
W |
|
|
|
a2 |
b2 |
|
a1 |
b1 |
W 2 |
W 1 |
|
. |
(54) |
|
|
|
|
m cos |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
6.10 Подрезание зубьев эвольвентного профиля
Для увеличения коэффициента перекрытия ε необходимо увеличить активный участок линии зацепления ab, который определяется пересечением линии зацепления NN окружностями выступов колес. Если увеличить диаметр da1 до тех пор, пока точка b не выйдет за пределы теоретического участка, за точку В (рисунок 81), то произойдет следующее:
1.Если колесо z1 является долбяком, а колесо z1 – нарезаемым,
иокружность головок зубьев пересекает линию зацепления за пределами теоретического участка АВ, например, в точке B’, то в
112

этом случае эвольвенты зубьев не касаются, а пересекаются. Нормаль к эвольвенте не проходит через полюс зацепления р, т.е. нарушается основной закон зацепления и зубчатое колесо окажется подрезанным.
2. Если звено z1 является обычным колесом, то произойдет заклинивание передачи вследствие того, что нормаль N’-N’ не проходит через полюс зацепления, т.е. нарушается основной закон зацепления.
N
N’ |
|
|
B1 |
В |
|
|
|
|
|
b |
|
|
p |
О1 |
|
|
|
О2 |
|
|
a
 А N’
А N’
N
Рисунок 81 – Подрезание зубьев
6.11 Определение минимального числа зубьев
а) При нарезании долбяком
Рассматриваются стандартные прямозубые колеса. Пусть z1 z2 , z1 – долбяк. Предельное положение колес при отсутствии подрезания будет тогда, когда точка b не выходит за пределы точки В, т.е. активный участок линии зацепления находится в пределах теоретического. Максимальный радиус окружности выступов долбяка по теореме косинусов
O1 B2 O1O22 O2 B2 2O1O2 O2 B cos .
Определяются отрезки
O1 B ra1 r1 ha m z21 m ha* m2 (z1 2ha* ),
113

О О |
|
а r |
r |
|
m |
(z |
|
z |
|
) , |
O |
B r |
r |
cos |
m |
z |
|
cos , |
|
|
|
|
|
|
|||||||||||||
1 |
2 |
1 |
2 |
2 |
|
1 |
|
2 |
|
2 |
b2 |
2 |
2 |
|
2 |
|
||
тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
m |
2 |
|
|
|||||||||||||
|
|
|
|
|
|
(z |
1 |
|
2h* )2 |
|
|
|
|
|
(z |
1 |
z |
2 |
)2 |
|
|
|
|
z 2 cos2 |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
m |
2 |
|
|
|
|
|
|
|
|
|
|
cos2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
2 |
|
|
|
|
|
|
|
(z |
1 |
z |
2 |
|
)z |
2 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
z 2 |
|
4z |
|
h* |
(h* )2 |
z 2 |
|
2z |
1 |
z |
2 |
z 2 |
|
z 2 cos2 |
|
|||||||||||||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
1 |
|
a |
|
|
|
a |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|||||||||
2z |
1 |
z |
2 |
cos |
2 2z |
2 cos2 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
группируются |
2z |
1 |
z |
2 |
(1 cos |
2 ) 2z |
1 |
z |
2 |
sin2 |
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
и z 2 z 2 cos2 2z |
2 cos2 z |
2 sin2 , откуда получается |
||||||||||||||||||||||||||||||||||||||||||||||
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
4z h* |
4(h* )2 |
|
z |
2 sin2 |
2z |
1 |
z |
2 |
sin2 |
и определяется число |
||||||||||||||||||||||||||||||||||||||
|
|
1 a |
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
зубьев долбяка |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
z |
2 sin2 4(h* )2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
z1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(55) |
|||||||||
|
4(h* ) 2z |
2 |
|
sin2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При = 200, h* |
|
1,0 z |
|
|
|
|
z 2 |
34 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
. |
|
|
|
|
(56) |
||||||||||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
34 2z2 |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Чтобы нарезать колеса с числом зубьев z2, необходимо иметь |
||||||||||||||||||||||||||||||||||||||||||||||||
долбяк с числом зубьев z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
z2 |
|
|
|
|
|
|
|
|
|
13 |
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
16 |
|
|
17 |
||||||||||
z1 |
|
|
|
|
|
|
< 17 |
|
|
|
|
|
|
|
< 27 |
|
|
|
|
|
|
< 48 |
|
|
|
|
|
< 112 |
|
любое |
||||||||||||||||||
b) При нарезании инструментальной рейкой
Число зубьев инструментальной рейки z1 = , чтобы это выполнить, нужно, чтобы в формуле
|
|
z 2 sin2 |
4(h* )2 |
|
||||
z1 |
|
2 |
|
|
a |
|
знаменатель дроби был равен нулю: |
|
4(h* ) 2z |
2 |
sin2 |
|
|||||
|
|
|
||||||
|
|
a |
|
|
|
|
||
4(h* ) 2z |
|
sin2 |
|
|
|
|
2h* |
h* 1,0 |
|
|
0, откуда |
z |
|
|
a |
, а при = 200 и |
|||
2 |
2 |
|
|||||||
a |
|
|
|
|
|
|
a |
||
sin2
получается, что z2 zmin 17 .
114

6.12 Определение минимального коэффициента смещения |
|||||||
Пусть требуется с помощью инструментальной рейки |
|||||||
изготовить колесо с числом зубьев меньше 17, при этом без |
|||||||
подрезания ножек зубьев. |
|
|
|
|
|
||
Известно, что эвольвентная часть профиля зуба нарезается |
|||||||
частью прямой зуба рейки между граничными прямыми (рисунок |
|||||||
82). |
|
|
|
|
|
|
|
Следовательно, при нарезании колеса с минимальным числом |
|||||||
зубьев |
без |
подрезания |
( z2 zmin 17 ) |
основная |
окружность |
||
нарезаемого колеса будет пересекать граничную прямую в точке |
|||||||
В2. В точке В1 будет касание основной окружности нарезаемого |
|||||||
колеса с числом зубьев больше 17. Так как число зубьев меньше |
|||||||
z z2min , то и радиус основной окружности меньше, поэтому она |
|||||||
коснется линии зацепления в какой-то точке В3. Следовательно, |
|||||||
смещение рейки должно быть положительным и равным х∙т. |
|||||||
|
|
|
|
|
N |
|
|
|
|
|
|
P |
|
|
|
|
|
|
m |
|
|
|
* m |
|
|
В3 |
|
|
|
a |
|
|
|
x |
C3 |
|
|
h |
|
|
|
В2 |
|
Граничная прямая |
|
||
|
|
|
|
|
|||
|
N |
В1 |
|
C2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О3 |
|
|
|
|
|
|
|
О2 |
|
|
|
|
|
|
|
О1 |
|
|
|
|
Рисунок 82 – Определение коэффициента смещения |
||||||
Из подобия треугольников РВ2С2, РВ3С3, О2В2С2 и О3В3С3 составляется соотношение
115
РС2 |
|
В2 |
О2 |
|
|
* |
|
|
|
* |
|
|
|
, РС |
2 |
h |
m , |
РС |
3 |
h m х т , |
|
|
|
|
||||||||
РС3 |
|
В3О3 |
|
a |
|
|
a |
|||
|
|
|
|
|
|
|
|
|||
В |
О |
|
|
r |
|
|
|
|
m z2min |
cos , |
В |
|
О |
|
|
r |
|
m z |
cos , |
||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
3 |
3 |
|
|
|||||||||||||||||||
2 |
|
|
|
|
|
b(min) |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
b |
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
h*m |
|
|
|
|
|
m z |
2min |
cos |
2 |
|
m z |
2min |
|
|
|
|
|
|
|
|
|
||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
m(ha* x) |
|
|
|
2m z cos |
|
|
|
|
m |
z |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
h* z z |
2min |
(h* x) , |
z |
2min |
x h* z |
2min |
h* z . |
|
|
|
|
|
|||||||||||||||||||||
a |
|
|
|
a |
|
|
|
|
|
|
|
|
a |
|
|
|
|
a |
|
|
|
|
|
|
|||||||||
Отсюда определяется коэффициент смещения х |
|||||||||||||||||||||||||||||||||
x x |
|
|
|
|
h* |
z2min z |
, при h* 1, |
x |
|
|
|
17 z |
. |
||||||||||||||||||||
min |
|
|
|
|
|
|
|
min |
|
||||||||||||||||||||||||
|
|
|
|
|
a |
z2min |
|
|
|
|
|
a |
|
|
|
|
|
|
|
17 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
6.13 Скорость скольжения
В параграфе 6.2.1. (Основной закон зацепления) определена скорость скольжения
Vск VK 2 VK 1 .
Определяются тангенциальные составляющие (рисунок 82)
V |
V |
|
|
sin |
|
|
|
|
|
O K |
AK |
|
|
|
AK , |
||||
K 1 |
1 |
1 |
|
|
1 |
||||||||||||||
K 1 |
|
|
|
1 |
|
O1 K |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
V |
V |
|
sin |
|
|
|
O |
K |
BK |
|
|
|
BK . |
||||||
K 2 |
2 |
2 |
|
|
2 |
||||||||||||||
K 2 |
|
|
|
|
|
|
2 |
|
|
O2 K |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
VCK BK 2 AK 1 (Bp pK ) 2 ( Ap pK ) 1
Bp 2 pK 2 Ap 1 pK 1 .
Из определения основного закона зацепления
u 1 |
|
O2 p |
|
Bp |
, откуда Ap |
|
Bp |
, тогда |
|
|
|
|
1 |
||||||
2 |
|
O1 p |
Ap |
2 |
|
||||
|
|
|
|
||||||
VCK pK( 1 2 ) |
. |
|
|
(57) |
|||||
Скорость скольжения равна произведению суммы угловых скоростей на расстояние от полюса зацепления до точки касания профилей зубьев, и чем дальше от полюса точка касания, тем больше скорость скольжения.
116
|
N |
A |
|
|
|
|
|
|
|
|
|
||
1 |
VK |
1 |
K |
n |
n |
2 |
|
|
|
VK 1 VK 2 |
|||
|
|
|
||||
|
VK 2 |
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
О1 |
|
|
|
p |
|
О2 |
|
2 |
VK1 |
|
2 |
||
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
VK2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
N |
|
|
|
|
|
|
|
|
|
Рисунок 83 – Скорость скольжения |
|
||||
6.14 Удельное скольжение
В процессе эксплуатации зубчатых колес зубья испытывают деформацию, связанную с трением. Это трение качения и трение скольжения. Трение качения мало и им пренебрегают. Трение же качения велико и, кроме того, что на его преодоление расходуется дополнительная энергия, оно вызывает износ зубьев. Коэффициент, являющийся параметром трения скольжения, называется удельным скольжением , это отношение скорости скольжения к тангенциальной составляющей скорости.
|
|
|
V |
V |
|
|
V |
V |
|
||||||
|
|
|
|
K 2 |
|
K 1 |
, |
|
|
|
K 2 |
|
K 1 |
. |
(58) |
1 |
|
VK |
|
2 |
|
VK |
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1 |
|
|
|
|
2 |
|
|
||||
После некоторых преобразований выводится, что
|
|
1 |
z1 |
|
AB |
|
z1 |
, |
|
|
1 |
z2 |
|
AB |
|
z2 |
, |
1 |
|
|
|
2 |
|
|
|
||||||||||
|
|
z2 |
|
x z2 |
|
|
z1 |
|
AB x z1 |
||||||||
|
|
|
|
|
|
|
|
||||||||||
(59)
здесь z1 и z2 – числа зубьев шестерни и колеса;
АВ – длина (в мм) теоретического участка линии зацепления; х – расстояние (в мм), измеренное от точки А линии
зацепления, в направлении к точке В.
117
Теоретический участок линии зацепления разбивается на несколько частей, высчитываются значения удельного скольжения для каждой части и составляется таблица. Ниже приводится таблица известных значений для любых пар зубьев.
Таблица значений удельных скольжений
х |
0 |
… |
Ар |
… |
АВ |
1 |
- |
|
0 |
|
1 |
2 |
1 |
|
0 |
|
- |
Строится диаграмма удельного скольжения (рисунок 84).
6.15 Блокирующий контур
Смещение исходного производящего реечного контура производится в следующих случаях:
118

A
B
1
 О2
О2
Рисунок 84 – Диаграмма удельного скольжения
1. Для увеличения контактной прочности зубьев. При расчете зубчатого зацепления на контактную прочность используют формулу Герца
|
|
0,418 |
|
Fn Enp |
|
, |
|
H |
b np |
||||||
|
|
|
|
|
|||
|
|
|
|
|
|
где Fn – сила полного нормального давления; Епр – приведенный модуль упругости Юнга;
Епр 2Е1 Е2
Е1 Е2
b – длина зуба или ширина колеса;
119

пр – приведенный радиус кривизны колес
пр 11 22 .
Для увеличения прочности зубьев (уменьшения поверхностного напряжения сжатия) невозможно уменьшить ни силу нормального давления, ни приведенный модуль упругости, ни увеличить длину зуба. Можно увеличить приведенный радиус кривизны, т.е. использовать наиболее удаленные участки эвольвенты – вводить положительное смещение.
2. Для увеличения прочности зубьев на изгиб. При расчете зубчатого зацепления на изгиб используют формулу
F |
Fn |
|
, |
b m |
|
||
|
y |
||
где у – коэффициент формы зуба, который зависит от кривизны профиля.
Чтобы уменьшить напряжения изгиба, необходимо вводить положительное смещение инструментальной рейки.
3.Для устранения подрезания ножек зубьев требуется также вводить положительное смещение инструмента.
4.Для устранения заострения вершин зубьев нужно вводить отрицательное смещение инструментальной рейки.
5.Для предотвращения интерференции зубьев необходимо также вводить отрицательное смещение.
6.Для увеличения коэффициента перекрытия применяется положительное смещение.
7.Для уменьшения удельного скольжения производится положительное смещение для одного колеса и отрицательное – для другого.
8.Для вписывания передачи в заданное межосевое расстояние может производиться как положительное, так и отрицательное смещение инструмента.
При проектировании зубчатых передач в связи с соблюдением всех перечисленных требований и многих других, конструктор может придти к противоречивым выводам. Нет какой-либо универсальной системы выбора коэффициентов смещения инструментальной рейки при нарезании колес, которые были бы
пригодны для всех случаев практики. Поэтому выбор
120