

lk
.pdf4 |
VE D |
; |
5 4 , так как звенья 4 и 5 соединяются |
||
4 |
|||||
|
|
|
|||
|
|
lED |
|
|
|
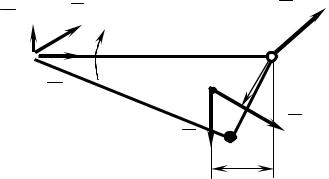
поступательной парой. Направления угловых скоростей звеньев показаны на рисунке 29,b.
3.6.2 Построение плана ускорений
aB 12lAB , так как 1 const , |
a |
a |
B |
|
м/с 2 |
|
||||||||||||||||||||||
|
|
|
. |
|||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
мм |
|
||
|
|
|
|
C |
|
B |
|
|
CBn |
|
|
|
CBt , |
|
|
|
|
|
|
|||||||||
a |
a |
a |
a |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BC |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
IIBC |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aCCr |
|
|
|
|
|
|
|
|
|||||
aC aC0 aCCc 0 |
|
0 , |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IIx -x |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где |
an |
|
2l |
BC |
– направлено параллельно ВС от точки С к точке |
||||||||||||
|
|
CB |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
В на |
плане |
механизма, a |
|
– |
перпендикулярно |
ВС, a |
Cо |
0, |
|||||||||
|
|
|
|
|
|
|
|
CB |
|
|
|
|
|
|
|
||
aс |
2 V |
|
0 |
, так как = 0, ar |
– направлено параллельно |
||||||||||||
CCo |
|
|
|
3 CCo |
|
|
|
3 |
|
CCo |
|
|
|
|
|
|
|
х-х. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Из |
|
точки |
b |
|
на плане |
ускорений |
проводится |
вектор |
bc', |
||||||||
изображающий в соответствующем масштабе aCBn , из конца
которого проводится прямая, перпендикулярная ВС, а из полюса – прямая, параллельная х-х. На пересечении этих прямых находится точка с. Тогда определятся векторы c'с и c , которые изображают в принятом масштабе ускорения aCB и aCCor , соответственно
(рисунок 30,b).
aCB c'c a , aC aCCor c a .
Ускорение точки D – по теореме подобия
BCBD bdbc , откуда bd bc BCBD , мм.
На отрезке bc плана ускорений находится точка d. Из полюса до точки d проводится вектор d , который изображает в принятом масштабе ускорение точки D ( аD d а ).
51

a) |
|
|
|
|
|
|
|
f |
В |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
1 |
|
|
D ε2 |
|
K |
|
|
e' |
1 |
|
|
|
|
,a,c0 |
|
||
|
|
|
|
|
|
|||
|
|
4 |
3 |
|
|
s4 |
||
|
|
|
|
|
|
|
||
А |
|
|
x |
|
|
x |
|
|
|
|
|
S4 |
С |
|
|
e" |
|
|
Е |
|
|
|
|
|
|
|
ε4 |
5 |
|
|
|
|
|
|
|
|
с) |
|
VE4E |
|
|
|
||
|
|
|
|
|
|
|
||
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
s2 |
|
|
|
aE4E |
|
|
|
с' |
b |
|
|
|
|
|
|
|
|
Рисунок 30 – Кулисный механизм: а – план механизма;
b – план ускорений; с – определение направления ускорения aEс 4 Е
Ускорение точки Е звена 4 определяется относительно точки D того же звена и точки Е звена 5, аЕ5 аЕ0 аЕ 0
|
|
|
E |
|
D |
|
nE D |
|
tE D , |
|
|
|
|||||||||
|
a |
a |
a |
a |
|
|
|
||||||||||||||
|
|
|
|
4 |
|
|
|
|
|
|
|
|
4 |
|
4 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ED |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
IIED |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a E acE4 E |
arE4 E , |
|
|
|
||||||||||||
|
a E4 |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IIED |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
ED |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где |
an |
|
D |
2l |
DE |
– вектор нормального ускорения направлен на |
|||||||||||||||
|
|
E |
|
|
4 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
плане механизма от точки E к точке D, |
|
|
|||||||||||||||||||
|
aE |
D – |
|
|
|
вектор |
тангенциального ускорения |
направлен |
|||||||||||||
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
перпендикулярно DE. |
|
|
|
|
|
|
|
||||||||||||||
|
Определяется |
|
ускорение |
Кориолиса |
по |
величине |
|||||||||||||||
aс |
|
2 V |
E4 Е |
и по направлению, для чего вектор относительной |
|||||||||||||||||
E4 Е |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|||||
скорости поступательного движения V E4 Е поворачивается на 90 в сторону угловой скорости звена 4 – 4 , в данном случае по ходу часовой стрелки (рисунок 30,с). Релятивное ускорение направлено вдоль звена 4, т.е. параллельно ЕD.
Строится план ускорений, находится точка е4 и определяются ускорения
52

a |
е'e |
4 |
|
a |
, |
ar |
е"e |
4 |
|
a |
, |
a |
E4 |
e |
a |
. |
E4 D |
|
|
|
E4 E |
|
|
|
|
4 |
|
По свойству подобия определяются ускорения центров тяжести звеньев (те же формулы, что и для скоростей).
Определяются угловые ускорения звеньев по величине и направлению (рисунок 30,а)
|
|
|
a |
|
|
|
|
|
aE |
D |
|
|
|
|
|
|
|
|
CB |
, |
|
0, |
|
4 |
|
, |
|
|
|
|
. |
||||
2 |
|
3 |
4 |
|
|
5 |
4 |
||||||||||
|
|
lBC |
|
|
|
lED |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Глава 4. СИЛОВОЙ АНАЛИЗ МЕХАНИЗМОВ
4.1Силы, действующие на звенья механизма
1.Движущие силы, Fд (моменты движущих сил, Мд) – силы,
стремящиеся ускорить движение ведущего звена. Элементарная работа, совершаемая движущей силой, на элементарном
перемещении всегда положительна |
|
|
|
|
|
|
|
Fд |
|||||
dA F dS cos(F V ) 0. |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
д |
|
д |
|
|
|
|
|
|
|
|
|
||
Направление |
скорости |
движения |
и |
силы, |
|
|
|
||||||
|
|
|
|
|
|||||||||
вызывающей это движение, совпадают или |
|
|
|
|
V |
||||||||
|
|
|
|
||||||||||
|
|
|
|
|
|||||||||
образуют острый угол. |
|
|
|
|
|
|
|
|
|
|
|||
|
|
При вращательном движении звена момент |
|||||||||||
Мд |
|
движущей силы (Мд) направлен в сторону угловой |
|||||||||||
|
скорости звена – . |
|
|
|
|
|
|
|
|
||||
2. Силы сопротивления, Fс (моменты сил сопротивления, Мс) – |
|||||||||||||
силы, стремящиеся замедлить движение |
|
|
|
|
|
||||||||
ведущего |
звена. |
Элементарная |
работа, |
Fс |
|
||||||||
совершаемая |
|
силой |
сопротивления |
на |
|
|
|||||||
|
|
|
|
|
|
||||||||
элементарном |
перемещении, |
всегда |
|
|
|
V |
|||||||
отрицательна |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
dA F dS cos(F , V ) 0 . |
|
|
|
|
|
|
|
|
|||||
c |
|
c |
|
|
|
|
|
|
|
|
|
|
|
Направление скорости движения и силы сопротивления |
|||||||||||||
|
противоположны или образуют тупой угол. |
|
|
|
|||||||||
Мс |
|
При вращательном движении звена момент силы |
|||||||||||
|
сопротивления |
(Мс) |
направлен |
|
в |
сторону, |
|||||||
противоположную угловой скорости звена – . |
|||||||||||||
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
53 |
|||

Силы сопротивления делятся на силы полезных сопротивлений и силы вредных сопротивлений.
Силы полезных сопротивлений Fпс – силы, приложенные к выходным звеньям механизма и совершающие работу, необходимую для выполнения требуемого технологического процесса.
Силы вредных сопротивлений Fвс – силы, на преодоление которых затрачивается дополнительная работа, сверх той, которая необходима для преодоления сил полезных сопротивлений. Это силы трения и силы сопротивления среды.
Силы трения, Ff (моменты сил трения, Мf) возникают в кинематических парах (поступательных – силы и вращательных – моменты) при относительном движении соприкасающихся поверхностей.
3. Силы тяжести звеньев, G – силы, работа которых на некотором, отсчитываемом по вертикали отрезке h (рисунок 31), будет определяться по формуле AG G h
V
G
h
V
G
h
Рисунок 31 – Работа силы тяжести
и является положительной, когда центр тяжести звена опускается (сила тяжести является движущей – угол между направлениями силы и скорости острый); отрицательной, когда центр тяжести поднимается (сила тяжести оказывается силой сопротивления – угол между направления силы и перемещения тупой); равна нулю, если центр тяжести звена остается на одном и том же
горизонтальном уровне. |
|
|
|
|
ε |
|
|
С |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
4. Силы инерции Fи и моменты сил инерции |
|
|
|
|
|
|
|
||||||
Ми звеньев возникают при движении звеньев с |
|
|
|
S |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
aS |
Fи |
||||||
ускорением F и m a S , |
Ми J S , |
||||||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Ми |
54 |
|||
|
|
|
|
|
|
В |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||

где J S – момент инерции звена, относительно оси, проходящей
через центр его тяжести.
5. Реакции связей F24 – это силы, приложенные к геометрическим элементам звеньев, и представляющие давление звеньев друг на друга. Реакции связей являются внутренними силами для всего механизма и внешними для каждого звена в отдельности. F24 – это сила, действующая со стороны звена 2 на звено 4. По третьему закону Ньютона
F 24 F 42 .
4.2 Условие статической определимости кинематической цепи
|
|
|
|
Вращательная кинематическая пара V |
||
|
F21 |
|
||||
|
|
|
|
|
1 |
класса. |
|
|
|
|
|
F12 – сила, действующая со стороны |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
звена 2 на звено 1. |
|
|
|
|
|
|
|
F21 – сила, действующая со стороны |
|
|
F12 |
|
звена 1 на звено 2. |
||
F 21 F 12 .
Модуль неизвестен, направление неизвестно, известна только точка приложения реакции.
Поступательная кинематическая пара V класса.
|
|
|
|
|
В поступательной кинематической паре V |
|||
|
F12 |
|
||||||
|
|
класса неизвестны величина |
и точка |
|||||
|
|
|
|
|
||||
1 |
|
|
|
2 |
приложения |
реакции, |
зато |
известно |
|
|
|
|
направление – перпендикулярно направляю- |
||||
|
|
|
|
|
||||
|
|
|
|
|
щей (по нормали к поверхности). |
|
||
Кинематическая пара IV класса.
В двухподвижной кинематической паре неизвестна величина
|
|
|
|
|
|
|
|
реакции, известны направление (по нормали |
n F12 |
F21 n |
к соприкасающимся поверхностям) и точка |
||||||
|
1 |
|
|
|
|
приложения (точка касания). |
||
2 |
|
|
Число уравнений статики, которое |
|||||
можно составить для плоского механизма –
55

3n (n – число подвижных звеньев);
2р5 – число неизвестных параметров у пар V класса; р4 – число неизвестных параметров у пар IV класса.
Для |
того, чтобы задача была решена, |
необходимо, чтобы |
||||
3n 2 p5 |
p4 . Если пар |
четвертого |
класса |
нет, то 3n 2 p5 0 , |
||
откуда |
p |
3 |
n , т.е. |
статически |
определимыми являются |
|
|
||||||
|
5 |
2 |
|
|
|
|
|
|
|
|
|
|
|
структурные группы Ассура.
Силовой анализ проводится в порядке, обратном образованию механизма.
Чтобы для механизма можно было применить уравнения статики, следует воспользоваться принципом D’Alembert: если ко всем силам, приложенным к звену или нескольким звеньям, добавить силы инерции, развиваемые этими звеньями, то данная система будет находиться в равновесии.
4.3 Кинетостатика четырехшарнирного механизма
При определении реакций в кинематических парах проводят силовой расчет механизма. Если при расчете не учитываются силы инерции звеньев, расчет называется статическим. Если силы инерции учитываются при расчете механизма, то такой расчет называется кинетостатическим. Рассмотрим пример кинетостатического расчета четырехшарнирного механизма.
Задано: G1, G2, G3, M3, JS1, JS2, JS3 (рисунок 32). По плану ускорений определяются ускорения центров тяжести звеньев и
угловые ускорения звеньев.
a) |
|
D |
|
b) |
c |
c” |
|
|
Mи3 |
|
|
s |
|
|
|
|
|
|
||
|
|
S3 |
|
Fи3 |
|
|
|
|
G3 |
M3 |
|
|
|
В |
Mи2 |
|
|
,a,d |
||
|
|
|
||||
|
|
|
|
|
||
Fи1 |
S2 |
Fи2 |
|
|
s1 |
|
S1 |
|
|
|
|
||
1 |
|
|
|
|
|
|
А G1 |
G2 |
F |
|
|
|
b |
|
|
|
|
|
|
|
Рисунок 32 – Кинетостатика шарнирного четырехзвенника: а – план механизма; b – план ускорений
56

Ускорения центров тяжести определяются по теореме подобия. Определяются силы инерции и моменты сил инерции.
Fи1 m1aS1 |
, Mи1 J S1 1 |
0 , так как |
ε1 = 0, ( 1 = |
сonst). |
Fи2 m2aS2 , |
Mи2 J S2 2 , |
Fи3 m3aS3 , |
Mи3 J S3 3 . |
Силы |
инерции направлены противоположно направлениям ускорений центров тяжести звеньев, а моменты сил инерции – противоположно угловым ускорениям звеньев.
М3 – момент сил полезных сопротивлений, приложен к третьему звену – коромыслу, противоположно направлению угловой скорости звена.
4.3.1 Кинетостатика структурной группы
Выделяют структурную группу (звенья 2 и 3) заменяя связи их реакциями (рисунок 33).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
03n |
|
|
|
|
|
|
|
|
|
|
|
F03 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
03 |
|
|
|
|
D |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S3 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fи3 |
|||||
|
|
|
|
|
|
|
|
|
|
G3 |
|
|
|
|
|
|
|||||
|
|
|
F12 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
F 12 |
|
|
|
|
|
|
|
|
|
|
Mи3 |
||||||||||
|
|
|
|
Mи2 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
M3 |
|
|
|
|
|
|||||||
В |
|
|
|
|
|
|
|
|
|
С |
|
|
|
||||||||
|
|
n |
S2 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
F 12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Fи2 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
G2
Рисунок 33 – Структурная группа (звенья 2, 3)
Необходимо определить величину и направление реакций, F03 (внешние реакции для группы) и F23 (внутренняя реакция).
Условие равновесия для структурной группы
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F 0 , |
F 12 G2 F |
и2 G3 F |
и3 F 03 0 . |
(36) |
|||||||||||
|
|||||||||||||||
В этом уравнении четыре неизвестных – величины и направления реакций F12 и F03.
Раскладывают внешние реакции на составляющие
F 12 F 12n F 12 и F 03 F 03n F 03 ,
57
причем нормальные составляющие направляют вдоль соответствующих звеньев таким образом, чтобы линии их действия проходили через точку С, а тангенциальные – перпендикулярно звеньям.
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
(37) |
|
|
G2 |
F и2 |
G3 F |
|
|
0. |
|||||||||||||||
F 12 |
F 12 |
и3 F 03 |
F 03 |
|
||||||||||||||||||
В уравнении (37) также 4 неизвестных, решить его невозможно. Рассматривают равновесие одного из звеньев, например, звена
2 (рисунок 34).
F 12 F12
В
Mи2
n |
S2 |
F 12 |
|
G2
F32
hи2
Fи2
h2
Рисунок 34 – Равновесие звена 2
М |
С |
|
0 |
, F |
l |
BC |
M |
и2 |
G h |
l |
F h |
|
l |
0 , |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
2 2 |
|
|
и2 и2 |
|
|
|
|
|
||||||||||||||||||||
откуда |
F |
G2h2 l |
|
Fи2hи2 l |
Mи2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
lBC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Затем рассматривают равновесие звена 3 (рисунок 35) и |
||||||||||||||||||||||||||||||||||||||||||
определяют тангенциальную составляющую реакции |
|
03 . |
|
|||||||||||||||||||||||||||||||||||||||
F |
|
|||||||||||||||||||||||||||||||||||||||||
М |
С |
|
0 |
, F l |
CD |
M |
3 |
M |
и3 |
F h |
|
l |
0, |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
03 |
|
|
|
|
|
|
|
|
и3 и3 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
F |
|
М3 Fи3hи3 l Mи3 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
03 |
|
|
|
|
|
|
|
lBC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Так как определились тангенциальные составляющие реакций, |
||||||||||||||||||||||||||||||||||||||||||
то можно решить уравнение (37) графически. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
(38) |
|
|
|
|
|
G2 F и2 G3 F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
F 12 |
F 12 |
и3 F 03 |
F 03 0. |
|
||||||||||||||||||||||||||||||||||||||
Для этого на направлении нормальной составляющей реакции F12 берут произвольную точку и от нее в выбранном масштабе сил откладывают известную касательную составляющую, затем, согласно уравнению (38) все известные силы последовательно
складывают. Из конца вектора |
|
03 |
проводят направление |
F |
|||
нормальной составляющей (рисунок |
36) до пересечения с |
||
|
|
|
58 |

направлением нормальной составляющей реакции F12. Так как сумма сил равна нулю, то силовой многоугольник должен быть замкнутым.
|
|
|
|
|
|
|
|
|
|
03n |
||
|
F03 |
|
|
|||||||||
|
|
F |
||||||||||
|
|
|
D |
|||||||||
|
||||||||||||
F 03 |
|
|
M3 |
|||||||||
|
|
Mи3 |
|
|
||||||||
|
|
S3 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Fи3 |
||||
|
|
|
|
|
G3 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
hи3 |
||
|
|
|
|
|
|
|
|
С |
||||
|
|
F23 |
||||||||||
Рисунок 35 – Равновесие звена 3
F12 |
Fи2 |
F 12 |
|
F23 = |
F32 |
F 03n |
|
F03 |
|
|
G3 |
Рисунок 36 – Графическое решение уравнения (38)
Так графически определяются направления и величины неизвестных реакций. На этом же силовом многоугольнике можно найти и внутреннюю реакцию, например, для звена 2 из условия равновесия
F 0, F 12 G2 F и2 F 32 0 определяется F 32 . Можно было рассмотреть условие равновесия звена 3
F 0 , G3 F и3 F 03 F 23 0 .
4.3.2 Кинетостатика ведущего звена (определение уравновешивающей силы, уравновешивающего момента)
59

Необходимо определить реакцию в кинематической паре А ( F01 ) – величину и направление (рисунок 37), а также величину и направление уравновешивающего момента – Му.
|
|
|
|
|
|
|
|
|
|
b) |
|||||||||
а) |
|
|
|
|
F21 |
|
|
||||||||||||
|
|
|
В |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F21 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
|
|
Fи1 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
F01 |
|||||||||
Му |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
G1 |
|
|
|
|
|
|
|
|
|
|||||||
А |
G1 |
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fи1 |
|||||||
F01 |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рисунок 37 – Кинетостатика ведущего звена
Так как степень подвижности ведущего звена (механизма I класса) не равна нулю (W ≠ 0), то ведущее звено после приложения к нему сил инерции не будет находиться в равновесии. Для равновесия необходимо приложить к нему уравновешивающую силу либо уравновешивающий момент. В этом примере к звену АВ прикладывается уравновешивающий момент.
Если рассматриваемая кинематическая цепь является двигателем, то уравновешивающий момент – это момент, приложенный со стороны рабочей машины к ведомому валу двигателя (рисунок 38,а).
Если рассматриваемая кинематическая цепь является рабочей машиной, то уравновешивающий момент – это момент, приложенный со стороны двигателя к ведущему валу рабочей машины (рисунок 38,b).
а) |
|
b) |
|
|
|
|
|
М (М ) |
Fд |
Му (Мд) |
Fс |
у с |
|
|
Рисунок 38 – Уравновешивающий момент: а – двигатель; b – рабочая машина (насос)
Под действием всех сил и уравновешивающего момента ведущее звено находится теперь в равновесии и для него можно применять условия статики
60