

lk
.pdfМ А 0 , М у G1h1 l F21h21 l 0,
откуда находят уравновешивающий момент
Му F21h21 l G1h1 l .
F 0 , G1 F и3 F 21 F 01 0,
откуда находят реакцию в паре А (рисунок 37,b).
4.4 Кинетостатика кулисного механизма
Определяются силы инерции и моменты сил инерции, развиваемые звеньями кулисного механизма (рисунок 39).
a) |
f |
ВFи2
|
|
S2 |
|
ε2 |
|
|
|
|
|
|
|
D |
Ми2 |
K F3 |
|
|
|
|
|
|
|
|
|
|||
1 |
|
G2 |
|
|
,a,c0 |
|
||
|
|
|
|
С,S3 |
s4 |
|||
А |
|
Fи4 |
|
|
|
|
|
|
|
Ми4 |
|
Fи3 |
|
|
|
||
|
|
S4 |
|
|
|
|
||
|
|
|
|
|
|
|
||
ε4 |
Е |
G4 |
|
|
|
G3 |
|
d |
|
|
|
|
|
||||
|
|
|
|
|
|
|
F
s2
 b
b
Рисунок 39 – Определение сил инерции и моментов сил инерции кулисного механизма: а – план механизма; b – план ускорений
|
Fи1 m1aS1 |
0, так как |
m1 0 , |
Ми1 |
1J S1 |
0 , |
так |
как |
|
1 0; |
|
|
|
|
|
|
|
|
|
|
Fи2 m2aS2 , |
Ми2 2J S2 ; |
|
|
|
|
|
||
|
Fи3 m3aS3 , |
Ми3 3J S3 |
0, так как 3 |
0; |
|
|
|
||
|
Fи4 m4aS4 , |
Ми4 4J S4 ; |
|
|
|
|
|
||
|
Fи5 m5aS5 |
0, так как |
m5 0 , |
Ми5 |
5 J S5 |
0 , |
так |
как |
|
J S |
0. |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
Сила полезного сопротивления F3 направлена в сторону, противоположную скорости точки К.
61

4.4.1 Кинетостатика структурной группы
Выделяется последняя присоединенная группа Ассура (рисунок 40, звенья 4, 5), заменяются связи их реакциями, про которых известно лишь то, что они проходят F24 – через точку D, a F05 – через точку Е. В уравнении
F 0, F 24 G 4 F и4 F 05
четыре неизвестных, решить его структурная группа Асура второго применить следующий прием.
0 |
(39) |
графически невозможно. Это класса. Для ее решения можно
F24
h4 D
Fи4  hи4
hи4  S4
S4
Е G4
G4
F Ми4 F05
Рисунок 40 – Кинетостатика группы (звенья 4, 5)
Рассматривается равновесие звена 5 (кулисного камня), на который действуют две реакции F05 и F45 (рисунок 41), про которые известно, что F05 проходит через центр шарнира, а F45 направлена перпендикулярно DE.
F
05
Рисунок 41 – Равновесие звена 5
Так как под действием этих сил звено 5 находится в
равновесии, то для него можно использовать уравнения |
|
||
М Е 0, тогда |
F45h45 0 . Так как |
F45 0 , то |
h45 0. |
Следовательно, сила |
F45 проходит через точку Е и остается |
||
перпендикулярной DE. Из другого условия равновесия |
|
||
|
|
|
62 |
F 0, F 45 F 05 0 получается, что F 45 F 05 , т.е. что
реакция F05 перпендикулярна звену DE (неверные силы перечеркнуты). Зная точку приложения и направление реакции можно определить ее по величине, взяв для структурной группы
М D 0, F05l DE G4 h4 l Gи 4 hи4 l Ми4 0 ,
|
F05 |
G4 h4 l Gи |
4 hи4 l М и4 |
0 |
||||||||
откуда |
|
|
|
|
|
|
|
|
. |
|
|
|
|
l DE |
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
Теперь в уравнении |
|
F 24 G 4 F и4 F 05 0 всего два |
||||||||||
неизвестных и оно решается графически (рисунок 42).
Fи4
F05
G4
F24
Рисунок 42 – Решение уравнения 39
Выделяется следующая структурная группа (звенья 2, 3), заменяются связи их реакциями (рисунок 43).
|
|
|
|
12n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Fи2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
F |
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
h42 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
||||
F12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
F12 |
G2 |
|
|
|
|
|
|
|
F3 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
F42 Ми2 |
|
|
|
|
F03 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С,S3 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hи2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
G3 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
h2 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 43 – Кинетостатика группы (звенья 2, 3)
Требуется определить реакции F12, F03 и F23 по величине и направлению. По условию равновесия
F 0, F 12 G 2 F и2 F 42 F и3 G 3 F 3 F 03 0
определить F12 и F23 не удается, хотя всего три неизвестных. Это группа Ассура второго класса, для нее приходится раскладывать F12 на нормальную и тангенциальную составляющие
63

|
12n |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
F |
G |
2 |
F |
и2 |
F |
42 |
F |
и3 |
G |
3 |
F |
3 |
F 03 0, (40) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
но и в этом уравнении три неизвестных. Поэтому рассматривается равновесие звена 2, для которого
МС 0 ,
F l |
ВС |
G h |
l |
F |
h |
|
|
l |
F |
|
h |
l |
М |
и2 |
0, откуда |
|||||||||||||||||||||||||
12 |
|
|
2 2 |
|
|
|
и 2 |
и2 |
|
|
|
4 |
2 42 |
|
|
|
|
|
|
|
||||||||||||||||||||
F G2h2 l Fи2hи2 l F42h42 l |
Mи2 . |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lBC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Теперь в уравнении (40) два неизвестных и оно решается |
||||||||||||||||||||||||||||||||||||||||
графически |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
12n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
F |
F |
|
G |
2 |
F |
и2 |
F |
42 |
F |
и3 |
|
G |
3 |
F |
3 |
F 03 0 . |
|||||||||||||||||||||||
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Рассмотрев условия равновесия звена 3
F 0, F 23 F и3 G 3 F 3 F 03 0
находят реакцию F23 (рисунок 44) по величине и направлению
МС 0 , F3 h3 F03h03 0
|
|
|
|
|
|
||||
|
|
|
F23 |
|
|
||||
F03 |
|
|
|
|
G2 |
||||
|
|
|
|
||||||
|
|
|
|
|
F |
||||
Fи2
G3
|
|
|
|
|
|
|
|
|
Fи3 |
||
F3 |
|||||
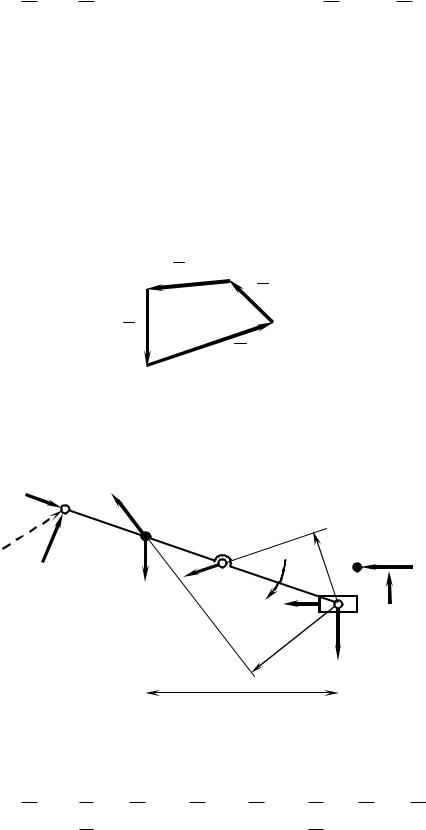
Рисунок 44 – Силовой многоугольник для структурной группы и точку приложения реакции F03 (рисунок 45).
64

F23
С,S3
Fи3
G3
F3
h3
h03

 F03
F03
|
|
|
|
Рисунок 45 – Равновесие звена 3 |
|
|
|
|
h |
|
F3 h3 |
, |
знак “минус” показывает, что |
реакция F |
|
||
|
03 |
|||||||
03 |
|
F03 |
|
|
|
|
||
|
|
|
|
|
|
|
||
приложена не справа, а слева от точки С. |
|
|
|
|
||||
|
|
4.4.2 Кинетостатика ведущего звена |
|
|
|
|||
Для ведущего звена АВ определяется реакция F01, а также (в |
||||||||
этом |
примере) |
уравновешивающая |
сила |
Fу, |
которая |
|||
прикладывается к ведущему звену в точке В перпендикулярно звену (рисунок 46).
а) |
|
|
|
а) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Fу |
|
|
|
|||
|
|
|
F21 |
||||||
F21 |
|||||||||
|
|
|
|||||||
|
|
1 |
|
|
|
h21 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
Fу |
|||
А |
F01 |
||||||
|
|
|
|||||
|
|
|
|
|
|
||
F01
Рисунок 46 – Кинетостатика ведущего звена: а – ведущее звено; b – план сил
Из условий равновесия определяется сначала Fу,
М |
|
0 , |
F |
h |
|
F |
|
АВ 0, откуда F |
|
|
F21h21 |
, |
|||||||
А |
|
y |
y |
|
|||||||||||||||
|
|
21 |
21 |
|
|
|
|
|
|
|
|
|
|
АВ |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а затем F01: F 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
F |
21 |
F |
21 |
F 01 0. |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4.5 Приведенные силы и моменты сил
65

При исследовании механизма удобно все силы и моменты сил, приложенные к звеньям механизма, заменять одной приведенной силой (Fпр) или моментом сил (Мпр). Обычно за звено приведения принимается ведущее звено рабочей машины (механизма) или ведомое (выходное) звено двигателя.
Приведенной называется сила, мгновенная мощность которой должна быть равна сумме мгновенных мощностей, развиваемых приложенными силами и моментами в данном положении механизма
P FnpV1 |
или P Mnp 1 , |
|
|
|||||||||||||||
P Pi |
(FiVi cos i Mi i ), откуда |
|||||||||||||||||
F |
|
(F |
|
Vi |
cos |
|
M |
|
i |
) |
или |
|||||||
|
|
|
|
i |
i |
V |
||||||||||||
np |
|
i V |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|||
M |
|
(F |
Vi |
|
cos |
|
M |
|
i |
) . |
||||||||
np |
|
|
i |
i |
|
|||||||||||||
|
|
|
i |
1 |
|
|
|
|
|
|
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
V1 |
|
|
Fnp |
|
|
|
|
|
|
1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mnp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
A 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рисунок 47 – Приведенные силы и моменты сил
Приведенным называется момент, мгновенная мощность которого должна быть равна сумме мгновенных мощностей, развиваемых приложенными силами и моментами в данном положении механизма.
4.6 Рычаг Н.Е. Жуковского
Согласно принципу возможных перемещений (если на какуюлибо механическую систему действуют внешние силы, то, прибавляя к данным силам силы инерции и давая возможные для данного ее положения перемещения, получаем ряд элементарных
работ, сумма которых должна равняться нулю) |
|
Fi Si cos i 0, |
(41) |
где Fi – приложенные силы, |
|
|
66 |

Si – возможные перемещения точек, в которых приложены силы
– угол между направлением приложенной силы и возможного перемещения.
Так как рассматриваемая цепь является механизмом, а связи считаем независимыми от времени (нет износа, ржавчины), то действительные перемещения будут в числе возможных
Fi dSi cos i 0 ,
где dSi – действительные перемещения
Fi dSdti cos i 0 или
FiVi cos i 0 – мощность, развиваемая всеми силами.
Пусть на звено ВС действует сила Fi, приложенная в точке D. Известна скорость точки В и направление скорости точки С. Построим план скоростей для звена и найдем скорость точки D (рисунок 48,b). Вектор скорости точки D переносим на план звена (рисунок 48,а) и найдем угол между скоростью этой точки и силой
Fi.
a) |
VC С |
b) |
|
c) |
|
c |
|
|
|
|
|
|
|
F |
|
c |
p |
|
|
|
|
|
F |
|
|
||
|
|
|
|
|
||
i |
D |
|
|
|
|
|
VD |
|
|
d |
|
i |
|
В |
|
|
|
|
hi |
|
|
|
b |
|
|
||
|
VB |
|
b |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Рисунок 48 – Рычаг Жуковского:
а – план звена; b – план скоростей; с – повернутый план скоростей
Поворачиваем план скоростей на 90 в любую сторону (в примере – по ходу часовой стрелки), на него переносим силу Fi, не изменяя ее по направлению. На линию действия силы Fi из полюса опускаем перпендикуляр.
Определяем мощность, развиваемую силой Fi
Pi FiVD cos i . |
(42) |
|
67 |

На повернутом плане скоростей найдем угол i. Это угол между линией pd и перпендикуляром к силе – hi (стороны, образующие угол, взаимно перпендикулярны: pd VD, a hi Fi). Определим cos i и подставим в формулу (42)
Pi Fi pd V pdhi , откуда Pi Fi hi V .
Для всех сил, действующих на звенья механизмаFi hi V 0 , но так как V 0, то Fi hi 0.
Правило. Все внешние силы, включая силы инерции, переносят на, повернутый на 90о, план скоростей в соответствующие точки, не изменяя ни их величины, ни направления. Повернутый план скоростей считают жестким рычагом, который под действием внешних сил может вращаться вокруг полюса плана сил р как вокруг неподвижной опоры.
Рассмотрим, как определяются моменты сил на рычаге Жуковского. Пусть на звено ВС действует момент инерции сил – Ми (рисунок 49). Заменим его парой сил, приложенных в точках В и С, перпендикулярно звену.
|
|
F |
F |
|
М и |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
и1 |
и2 |
|
l BC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
a) |
|
С |
|
|
|
|
b) |
c |
|
|
|
|
c) |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
и1 |
p |
Fи2 |
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
и1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ж |
|
hи1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ми |
|||
|
|
|
|
|
|
|
|
|
Fи2 |
|
|
p |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Fи2 |
В |
|
|
|
|
|
|
|
b |
hи2 |
|
|
|
c |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
и1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рисунок 49 – Моменты сил на рычаге Жуковского:
а– звено; b – сходственность отрезков ВС и bc;
с– несходственность отрезков ВС и bc
68

Переносим силы на повернутый по ходу часовой стрелки план скоростей в соответствующие точки и определяем момент сил инерции на рычаге Жуковского
Миж Fи1hи1 Fи2 hи2 .
Так как V C V B V CB и VCB ВС, то, повернув отрезок bc на 900, получим bc ВС, следовательно hи1 hи2 bc . Тогда
М ж F h |
F h |
M |
|
bc |
, Н∙мм. |
|
|
|
|||||
и |
и1 и1 |
и2 и2 |
|
и l BC |
||
При повороте плана скоростей против хода часовой стрелки |
||||||
(рисунок 49,с) момент инерции на рычаге Жуковского изменяет направление и тогда, в общем виде
М ж |
M |
|
bc |
. |
|
|
|||
и |
|
и |
||
|
|
|
lBC |
|
Правило: При переносе на рычаг Жуковского момент своего |
||||
направления не изменяет, если отрезки на плане механизма и на повернутом плане скоростей сходственно расположены.
4.7 Определение приведенных и уравновешивающих сил методом Жуковского
Рассмотрим определение уравновешивающей силы методом Жуковского на примере кулисного механизма (параграф 2.5). Вычерчиваем план механизма с нанесенными на него силами и моментами сил инерции, а также план скоростей этого механизма (рисунок 50).
a) |
|
|
|
b) |
|
В |
|
Fи2 |
|
f |
|
|
|
|
|
|
|
|
|
S2 |
|
e4 |
|
|
|
|
D |
b |
|
|
|
|
Ми2 K F3 |
||
1 |
|
G2 |
|
|
|
|
|
s4 |
s2 |
||
|
|
|
|
||
А |
|
Fи4 |
|
С,S3 |
|
|
Ми4 |
Fи3 |
|
||
|
|
|
|
||
|
|
|
S4 |
|
|
|
Е |
|
G4 |
G3 |
|
|
|
|
|
||
|
|
|
|
c |
|
F |
|
|
|
P,a,c0,e0 |
|
|
|
|
|
|
Рисунок 50 – Определение уравновешивающей силы:
69

а – план механизма; b – план скоростей
Поворачиваем план скоростей на 90 и переносим на него в соответствующие точки все силы, включая силы инерции (рисунок
51).
Рассматриваем повернутый план скоростей как жесткий рычаг, который под действием приложенных к нему сил и моментов может вращаться вокруг полюса как вокруг неподвижной опоры. Чтобы он не вращался (находился в равновесии), приложим к нему в точке b уравновешивающую силу (перпендикулярно pb, т.е. звену
АВ), которую и определяем из условия
М р 0.
Fy pb Mиж2 Fи2hи2 G2h2 (Fи3 F3 ) pc Fи4hи4 G2h2 Mиж4 0,
откуда
F |
|
F h |
G h (F |
и3 |
F ) pc F h |
_ G h M ж |
M ж |
||||
y |
|
и2 и2 |
2 2 |
3 |
и4 и4 |
2 2 |
и4 |
и2 . |
|||
|
|
|
|
|
|
pb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F np F y .
Приведенная сила равна по величине уравновешивающей, приложена в той же точке и противоположно направлена.
70