

1. Алгоритм управления и функциональная схема системы автоматического пуска электропоезда.
Алгоритм управления электропоездом представлен в таблице 1, а электрические схемы силовых цепей и цепей управления моторного вагона на рисунках 1 и 2 сответственно.
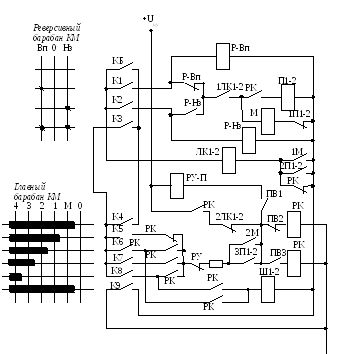
Рис 2. Упрощенная принципиальная схема цепей управления.
2. Статические характеристики тягового двигателя и сопротивление пускового реостата.
2.1. Расчет номинального тока двигателя.
Номинальный ток рассчитываем по следующей формуле:
![]() (1)
(1)
Здесь
![]() = 1500 В – номинальное напряжение двигателя
= 1500 В – номинальное напряжение двигателя
![]() = 0,9 – КПД двигателя
= 0,9 – КПД двигателя
2.2. Расчетная таблица и график скоростных характеристик двигателя.
Таблица рассчитывается с использованием следующих формул.
![]() (2)
(2)
![]() (3)
(3)
Здесь
![]() – относительное значение тока
– относительное значение тока
![]() – относительное значение скорости
движения, которые приведены в таблице
2. Результаты расчета тока двигателя к
скорости движения в абсолютных единицах
приведены в таблице 3. По данным таблицы
на миллиметровой бумаге построим
характеристикиV(I)
для всех позиций регулирования в масштабе
для токаm1=1,0
А/мм; для скоростиmv=0,10
км/ч/мм., рис. 3.
– относительное значение скорости
движения, которые приведены в таблице
2. Результаты расчета тока двигателя к
скорости движения в абсолютных единицах
приведены в таблице 3. По данным таблицы
на миллиметровой бумаге построим
характеристикиV(I)
для всех позиций регулирования в масштабе
для токаm1=1,0
А/мм; для скоростиmv=0,10
км/ч/мм., рис. 3.
2.3. Расчет сопротивления обмоток двигателя.
|
|
2.4. Расчет сопротивления пускового реостата.
Сопротивление пускового реостата рассчитывается при условии трогания вагона на первой позиции реостатного контроллера:
|
|
Здесь I1= – ток трогания на первой позиции, берется из графика рис. 3.
Uc= – напряжение сети
m=4 – количество последовательно включенных двигателей
2.5. Расчет секций пускового реостата определяется по формуле:
![]() ,
(6)
,
(6)
где Rc– сопротивление секций, заданное в процентах от полного сопротивления реостатаR1. Секция а – 21,9%, секция б – 10,4%, секция в – 9,4%, секция г – 8,3%.
![]() =
=
![]() =
=
![]() =
=
![]() =
=
Для исключения ошибок в расчетах выполняем проверку:
![]() =
=
Сопротивление секций реостата Таблица4
|
Секции |
а |
б |
в |
г |
|
|
|
|
|
|
На основе полученных данных заполняем колонку параметра Rв таблице 1, а значения сопротивлений секций представляем на схеме, рис. 1.
3. Исходная пусковая диаграмма и последовательность работы системы управления электропоездом.
3.1. Исходная пусковая диаграмма
Исходную пусковую диаграмму построим исходя из условия перехода на последующую, очередную скоростную характеристику при значении тока двигателя, равном току уставки реле ускорения, величина которого принимается:
![]() =
(7)
=
(7)
Исходная пусковая диаграмма показана на рисунке 3 тонкими линиями.
Характеристики тягового двигателя в относительных единицах Таблица 2
|
Ток двигателя I/Iн, |
0,8 |
1,0 |
1,3 |
1,6 |
2,0 |
2,2 | ||||||
|
Скорость движения V/Vн, по позициям |
|
|
|
|
|
| ||||||
|
1 |
0,21 |
0,08 |
-0,05 |
- |
- |
- | ||||||
|
2 |
0,28 |
0,16 |
0,05 |
-0,05 |
- |
- | ||||||
|
3 |
0,35 |
0,25 |
0,15 |
0,07 |
-0,03 |
- | ||||||
|
4 |
0,39 |
0,29 |
0,20 |
0,13 |
0,05 |
- | ||||||
|
5 |
0,42 |
0,33 |
0,24 |
0,18 |
0,11 |
- | ||||||
|
6 |
0,45 |
0,37 |
0,29 |
0,24 |
0,18 |
- | ||||||
|
7 |
0,48 |
0,41 |
0,34 |
0,29 |
0,24 |
- | ||||||
|
8 |
0,51 |
0,44 |
0,38 |
0,34 |
0,29 |
- | ||||||
|
9 |
0,54 |
0,48 |
0,42 |
0,38 |
0,34 |
- | ||||||
|
10 |
0,66 |
0,57 |
0,50 |
0,45 |
0,40 |
- | ||||||
|
11 |
0,81 |
0,66 |
0,57 |
0,51 |
0,45 |
- | ||||||
|
12 |
1,03 |
0,80 |
0,57 |
0,39 |
0,17 |
- | ||||||
|
13 |
0,93 |
0,77 |
0,64 |
0,53 |
0,40 |
- | ||||||
|
14 |
1,0 |
0,85 |
0,74 |
0,64 |
0,54 |
- | ||||||
|
15 |
1,06 |
0,93 |
0,82 |
0,74 |
0,65 |
- | ||||||
|
16 |
1,12 |
1,00 |
0,91 |
0,84 |
0,77 |
- | ||||||
|
17 |
- |
1,18 |
1,05 |
0,96 |
0,89 |
- | ||||||
|
18 |
- |
- |
1,19 |
1,09 |
0,99 |
0,95 | ||||||
Характеристики тягового двигателя Таблица 3
|
Ток двигателя I, А |
|
|
|
|
|
|
|
Скорость движения V, км/ч по позициям |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
13 |
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
16 |
|
|
|
|
|
|
|
17 |
|
|
|
|
|
|
|
18 |
|
|
|
|
|
|
Построенная пусковая диаграмма была бы справедлива, если бы аппараты выполняли свои функции без затрат времени и длительность переходных процессов равнялась бы нулю.