


4.Механіка твердого тіла
4.1.Основні поняття
Найпростішими видами механічного руху твердого тіла
є поступальні й обертальні рухи.
Поступальний рух тіла може бути охарактеризований
рухом однієї будь-якої його точки, наприклад центра мас. При обертальному русі твердого тіла його точки опису-
ють кола, розташовані в паралельних площинах. Центри всіх кіл містяться на одній прямій, перпендикулярній до площин кіл і названій віссю обертання. Вісь обертання в даній системі відліку може бути або рухомою, або нерухомою.
Кутова швидкість (ω) — векторна величина, яка харак-
теризує швидкість обертання тіла: |
|
|
|||
|
∆ϕ |
|
|
dϕ |
|
ω= lim |
|
= |
|
|
. |
∆t |
|
dt |
|||
∆t→0 |
|
|
|
||
Кутова швидкість — відношення кута повороту радіуса
обертання до часу, за який поворот відбувся:
ω= ϕt .
Вектор кутової швидкості ω напрямлений уздовж осі обертання за правилом правого гвинта, тобто так само, як і вектор dϕ (рис. 75).
d
O R |
|
|
v |
Рис. 75 |
|
100
4. Механіка твердого тіла
Кутова швидкість рівномірного обертального руху (T —
період обертання, n — частота обертання):
ω= 2Tπ =2πn .
Одиниця кутової швидкості — радіан за секунду (рад/с). Радіан за секунду дорівнює кутовій швидкості рівномірно обертового тіла, всі точки якого за 1 с повертаються від-
носно осі на кут 1 рад.
Кутове прискорення (ε) визначається відношенням зміни кутової швидкості обертання до проміжку часу обер-
тання:
ε = ∆∆ωt .
При обертанні тіла навколо нерухомої осі вектор кутового прискорення напрямлений уздовж осі обертання в бік вектора елементарного приросту кутової швидкості.
При прискореному русі вектор ε співнапрямлений із вектором ω, при уповільненому — протилежний йому
(рис. 76, а, б).
а |
б |
Рис. 76
4.2. Умови і види рівноваги твердого тіла
Загальна умова рівноваги тіла: для того щоб тіло перебувало в рівновазі, необхідно, щоб дорівнювали нулю
101
Механіка
геометричнасума прикладених до нього сил і алгебраїчна сума моментів сил відносно можливої осі обертання:
F1 + F2 + …+ Fn = 0,
M1 + M2 + …+ Mn = 0.
Виконання цих умов не заважає, проте, тілу виконувати рівномірний прямолінійний поступальний рух або обертання з постійним періодом обертання.
Види рівноваги:
—стійка,
—нестійка,
—байдужа.
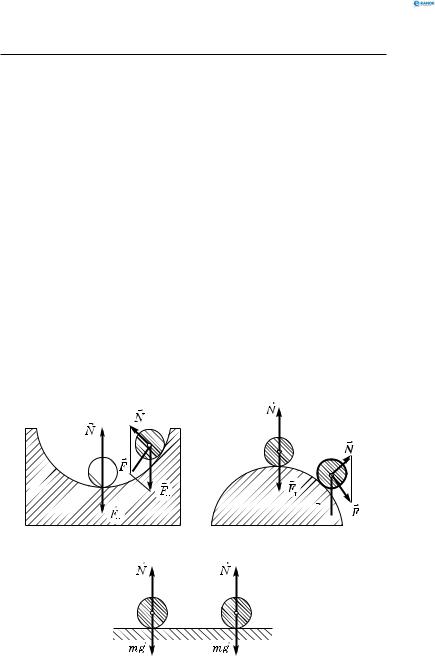
Рівновага тіла стійка, якщо при малому відхиленні від положення рівноваги рівнодійна сил, прикладених до тіла,
повертає його до положення рівноваги (рис. 77, а). Рівновага тіла нестійка, якщо при малому відхиленні ті-
ла від положення рівноваги рівнодійна сил, прикладених до
тіла, віддаляє його від цього положення (рис. 77, б).
Рівновага називається байдужою, якщо ті ло , виведене з певного стану рівноваги, залишається в рівновазі в новому положенні (рис. 77, в).
 ð
ð

 ð
ð
а |
б |
в |
Рис. 77 |
102
4. Механіка твердого тіла
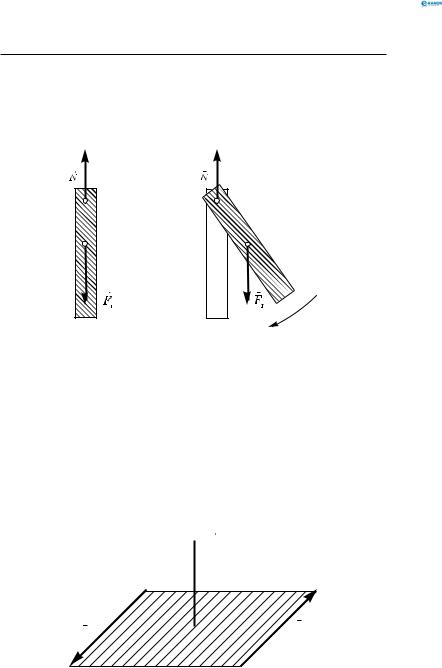
Рівновага тіла, яке має вісь обертання, стійка за умови, що його центр тяжіння розташований нижче від осі обертання. Для максимально стійкої рівноваги центр тяжіння має перебувати в найбільш низькому із можливих для нього положень (рис. 78).
Рис. 78
Пара сил — дві паралельні сили, однакові за модулем, але напрямлені в протилежні боки.
Пара сил не має рівнодійної і тому зумовлює тільки обертання тіла відносно центра маси. Пара сил характе-
ризується її вектором моменту (M), що чисельно дорівнює площі паралелограма, побудованого на цих силах. Вектор моменту можна переміщувати в будь-якому паралельному йому напрямку (рис. 79).
 M
M
F  F
F
Рис. 79
103