

-
Электромагнитный стабилизатор напряжения. Конструкция и принцип работы.
Электромагнитный стабилизатор предназначен для предварительной стабилизации напряжения сети переменного тока.
Электромагнитный стабилизатор представляет собой трансформатор с магнитным шунтом между первичной и вторичной обмотками, работающий в режиме электромагнитного насыщения. Вторичная обмотка имеет емкостную нагрузку.
Электромагнитный стабилизатор состоит из трех основных частей. Главную часть стабилизатора составляет магнитный усилитель дроссельного типа; остальные две части представляют измерительную систему и вспомогательный нерегулируемый селеновый выпрямитель.
Электромагнитные стабилизаторы напряжения работают за счет регулировки магнитных потоков в сердечнике трехфазного трансформатора. Регулировка выполняется через изменение магнитной проницаемости зазора сердечника, что меняет общую магнитную проницаемость контура и коэффициент трансформации напряжения. В качестве коммутационных элементов переключающих обмотки положительной и отрицательной полуволн используют тиристоры или симисторы. Скорость регулировки определяется постоянной времени трансформатора, быстродействием системы подмагничивания, быстродействием системы измерения. Остальные важнейшие характеристики - сердечником.
Достоинства:
Широкий температурный диапазон
Отсутствие механических деталей (отсутствие механического износа)
Относительно высокое быстродействие
Относительно высокая точность стабилизации
Недостатки:
Узкий диапазон входного напряжения
Низкая перегрузочная способность
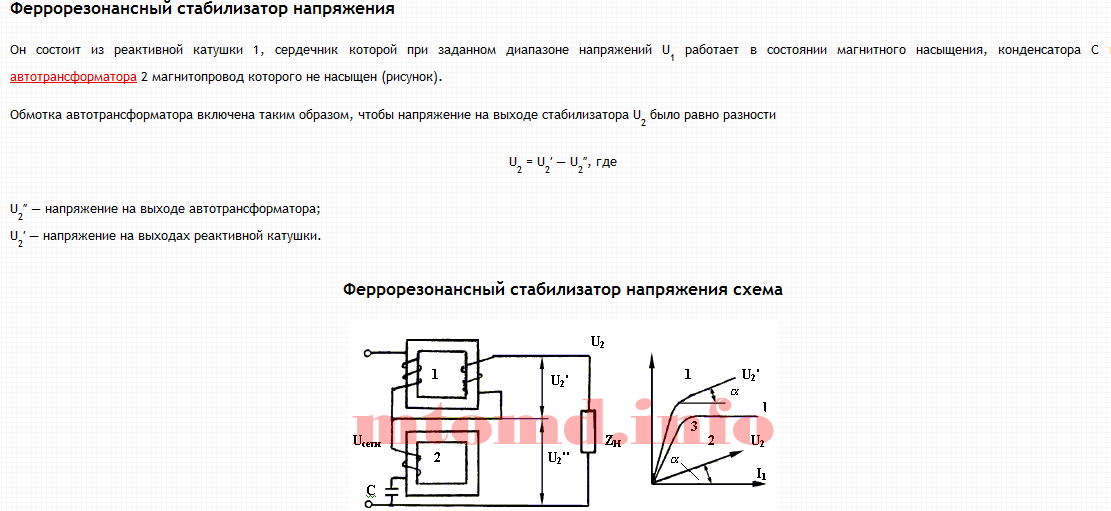
Электромагнитный стабилизатор напряжения
Электромагнитные стабилизаторы напряжения делятся на два типа:
ферромагнитные насыщенного типа (без емкости), в которых используются явления, основанные на насыщении ферромагнитного сердечника;
феррорезонансные стабилизаторы напряжения (с емкостью), работа которых основана на резонансе токов и напряжений.
Рассмотрим работу феррорезонансного стабилизатора напряжения.
-
Конструкция, принцип работы и характеристики синхронного шагового двигателя. Классификация.
Ша́говый электродви́гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Конструкция.
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого (ферромагнитного) материала или из магнито-твёрдого (магнитного) материала. Шаговые двигатели с магнитным ротором позволяют получать бо́льший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.

Принцип работы.
Шаговый двигатель в движении показывает последовательность цифровых переключений. Магнитное поле, вращаясь, обеспечивает на обмотках соответствующие переключения напряжения. Потом за этим полем начнет вращение ротор, который соединен с выходным валом двигателя посредством редуктора.
Характеристики.

Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Предельная механическая характеристика- это зависимость максимального синхронизирующего момента от частоты управляющих импульсов
Приемистость- это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления (рис. 3.25, где по оси абсцисс откладывается момент сопротивления типа трения).
Классификация.
Различают следующие типы шаговых двигателей:
-
Реактивные шаговые двигатели (Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.)
-
Индукторные (гибридные) шаговые двигатели.( По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики.)
-
Линейные шаговые синхронные двигатели (Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов)