

-
Позиционный регулятор.
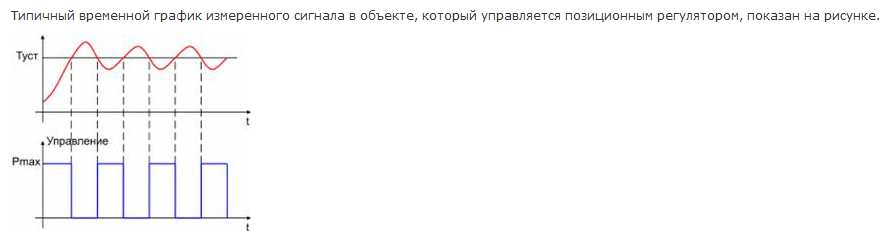
Это самый широко распространенный тип регулятора. Причина популярности в его простоте при удовлетворительном качестве регулирования. Этот регулятор описывается зависимостью выходного сигнала управления от входного сигнала, представленной на диаграмме.
Регулятор типа 1 применяется для управления объектами с исполнительным устройством типа «нагреватель»: наличие сигнала управления приводит к увеличению измеренного сигнала, регулятор типа 2 - для управления объектами с исполнительным устройством типа «холодильник»: наличие сигнала управления приводит к уменьшению измеренного сигнала. Принцип действия регулятора типа 1 (типа 2 аналогично) заключается в том, что он полностью включает управляющее воздействие, если измеренный сигнал меньше заданного (уставки), и полностью выключает, если сигнал больше уставки.

Принципиально важны два обстоятельства. Во-первых, при управлении объектом с помощью позиционного регулятора всегда присутствуют колебания измеренного сигнала по причине инерционности отдельных элементов, входящих в контур управления. Во-вторых, величина этих колебаний и период не зависят от регулятора, а полностью определяются конструкцией и параметрами объекта управления, измерительного датчика и исполнительного устройства.
Применение позиционного регулятора дает хорошие результаты, если:
- инерционность датчика и исполнительного устройства значительно меньше инерционности объекта правления;
- транспортное запаздывание отсутствует;
- мощность управляющего воздействия соответствует объекту управления.
-
Пропорциональный (п) регулятор.
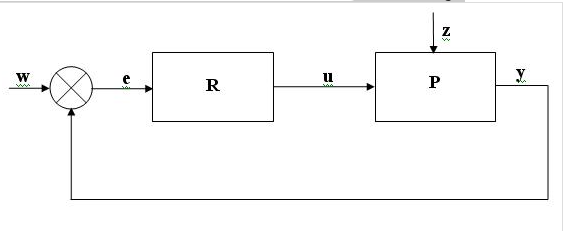
П-регулятор – это устройство в обратной связи, которое формирует управляющий сигнал. П-регулятор выдает выходной сигнал, пропорциональный входному, с коэффициентом пропорциональности К.
Выходной сигнал, вырабатываемый пропорциональной частью П-регулятора , противодействует отклонению регулируемой величины от данного значения, которое наблюдается в данный момент. Выход П-регулятор выдаст тем больше, чем больше отклонение.
Если П-регулятор имеет входной сигнал, который равняется заданному значению, то выходной равен 0.
П-регулятор имеет существенный недостаток в том, что при его использовании значение регулируемой величины никогда не стабилизируется на заданном значении. Все из-за так называемой статической ошибки. Она равна отклонению регулируемой величины, которая дает такой выходной сигнал, который стабилизирует выходную величину именно на данном значении. Это важно учитывать при выборе закона регулирования.
-
Интегральный (и) регулятор.
В интегральном регуляторе изменение входного сигнала Dj вызывает пропорциональное изменение скорости выходного сигнала (а не его величины, как в пропорциональном регуляторе).
Математически закон регулирования записывается:
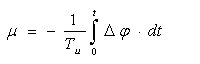
Tи - постоянная времени интегрирования, является параметром настройки интегрального регулятора.
В интегральном регуляторе скорость изменения выходного сигнала тем больше, чем больше величина входного сигнала. Численное значение параметра равно времени, в течение которого исполнительный механизм переместится из одного крайнего положения в другое при максимальном значении Dj. Интегральный регулятор поддерживает установившееся значение регулируемой величины вне зависимости от нагрузки регулируемого объекта, т.е. в системе отсутствует остаточное отклонение. По этой причине такие регуляторы называют астатическими. Недостаток - малое быстродействие.