

Теория механизмов и машин. Мет. указ. к РГР
.pdfФедеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Филиал в г.Сызрани
А.П. Осипов
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Методические указания к расчетно-графической работе
САМАРА, 2006
ББК 34.41 УДК 621.01
Теория механизмов и машин. Мет. указ. к РГР/А.П. Осипов ; Самар. гос. техн. ун-т, филиал в г.Сызрани. Самара, 2006.
Рассмотрены необходимые теоретические положения, а также приведены примеры выполнения отдельных вопросов РГР.
Предназначено для студентов механических специальностей, выполняющих РГР по теории механизмов и машин.
Ил. 8. Табл. 8 Библиогр.: 3 назв.
Рецензенты: канд. техн. наук. Б.М. Маврин, канд. техн. наук В.Я. Судаков,
Печатается по решению редакционно-издательского совета Самарского государственного технического университета
2
Расчетно-графическая работа по теории механизмов и машин является первой общеинженерной работой для студента-механика. При работе над РГР закрепляются знания по курсу, развиваются умения применять общие методы проектирования и исследования схем механизмов для решения конкретных задач, приобретаются навыки работы с литературой.
Работа содержит решение задач проектирования, структурного и кинематического анализа плоских рычажных механизмов. Используется графический метод решения. В работе имеется также задачи повышенной сложности (для самостоятельного и обязательного решения), которые состоят в использовании аналитического метода решения. Значительная часть работы выполняется с помощью ЭВМ, поскольку владение компьютерными методами является неотъемлемой составляющей подготовки современного инженерамеханика.
Задание на РГР содержит схему расположения неподвижных опор и направляющих, варианты структурных групп второго класса и последовательность их присоединения. Варианты заданий повышенной сложности включают расчет механизмов с большим количеством звеньев, со структурными группами класса выше 3-го, аналитический кинематический расчет, моделирование работы механизма в современных математических и графических пакетах.
Последовательность работы над РГР, рекомендуемая в данной работе, отражает опыт работы кафедры «Техническая механика» Сызранского филиала Самарского государственного технического университета.
3
СОДЕРЖАНИЕ РАСЧЕТНО-ГРАФИЧЕСКОЙ РАБОТЫ
1.Синтез схемы исполнительного механизма.
2.Структурный анализ исполнительного механизма.
3.Расчет кинематических характеристик исполнительного механизма.
3.1.Построение плана положений механизма (8-10 положений механизма).
3.2.Построение планов аналогов скоростей для всех положений механизма. Определение крайних положения механизма.
3.3.Вычерчивание механизма в крайних положениях и определение углов поворота начального звена, соответствующих прямому и обратному ходу выходного звена. Построение планов аналогов скоростей для этих положений.
3.4.Построение графика перемещения точки выходного звена. 3.5.Построение графика аналога скорости точки выходного звена по пла-
нам аналогов скоростей и результатам дифференцирования графика перемещений.
3.6.Составление таблиц аналогов скоростей точек (включая центры тяжести звеньев) и угловых скоростей звеньев механизма.
1. Синтез схемы исполнительного механизма
Для построения кинематической схемы необходимо по Приложению 1 определить положение точек A, D и F, в которых будут расположены неподвижные стойки или направляющие.
В точке А к стойке присоединяется начальное звено АВ. Соединение является вращательной кинематической парой. Длину начального звена рекомендуется назначать в пределах 100 – 150 мм. Направление вращения начального звена выбирается произвольно.
По Приложению 2 выбираются две структурные группы, которые будут образовывать механизм. Первая структурная группа присоединяется к начальному звену в точке В. Далее в точке 4 к первой структурной группе присоединяется вторая структурная группа.
Критическим процессом на данном этапе является выбор размеров звеньев, которые имеют постоянную длину. Здесь необходимо учитывать следующее:
1.Длина звена, которое является направляющей, выбирается по крайнему положению ползуна так, чтобы в любом положении ползун был на направляющей. И наоборот, если звено движется внутри ползуна, необходимо, чтобы звено не «выскакивало» из ползуна.
2.В структурной группе 1 модификации (группа BCD на этой странице) сумма длин звеньев BC и CD должна быть больше расстояния BD.
4
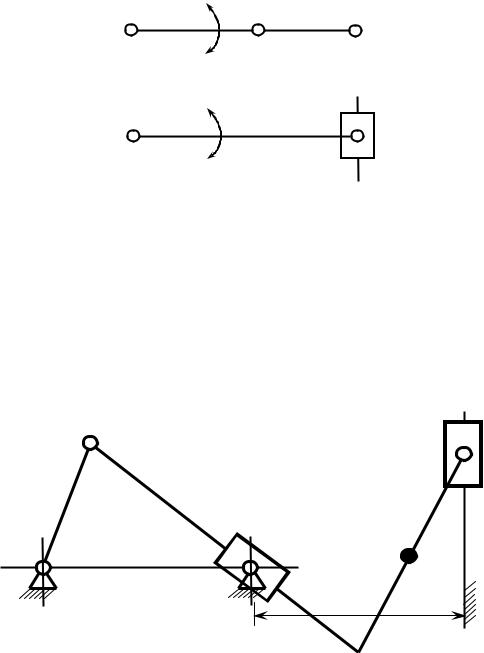
3.В структурной группе 2 модификации (ВВП или ПВВ), как группа BC на этой странице, длина звена BC должна быть больше расстояния от точки B до направляющей (или угол наклона звена к направляющей должен быть постоянно острый или тупой).
4.Подбор длин звеньев необходимо осуществлять так, чтобы ни в одном из положений механизма не наблюдалось разрыва кинематической цепи или перемещения ползуна через какую-либо кинематическую пару.
5.Необходимо также следить, чтобы звенья в каждой структурной группе не попадали в положение неустойчивого равновесия, из которого движения последнего звена возможно в двух направлениях.
B C D
B |
C |
|
Ориентиром для выбора длин звеньев является расстояние между неподвижными точками. Например, для механизма, изображенного на рис. 1, длина звена BE очевидно должна быть больше длины звена AD, а длина звена EF – больше h, чтобы избежать положения неустойчивого равновесия.
Положение точки 4 выбирается произвольно, соразмерно длине звеньев. Необходимо следить, чтобы точка 4 при своем движении не проходила внутрь ползуна.
Пример синтеза схемы механизма для структурных групп X и V приведен на рис.1.
B |
F |
|
A |
D |
4 |
|
|
h
 Е
Е
Рис.1. Синтез кинематической схемы механизма
5

2. Структурный анализ исполнительного механизма.
Рекомендуется следующий порядок анализа:
1)вычертить схему механизма (без масштаба). Обозначить все звенья и кинематические пары: входное звено - цифрой 1, стойку – 0, кинематические пары – заглавной буквой латинского алфавита;
2)установить класс и порядок (семейство) механизма.
3) вычислить подвижность механизма. Выделить начальное звено, связав с ним обобщенную координату. Обозначить на схеме звенья с местной подвижностью (если есть);
4) начертить структурную схему механизма.
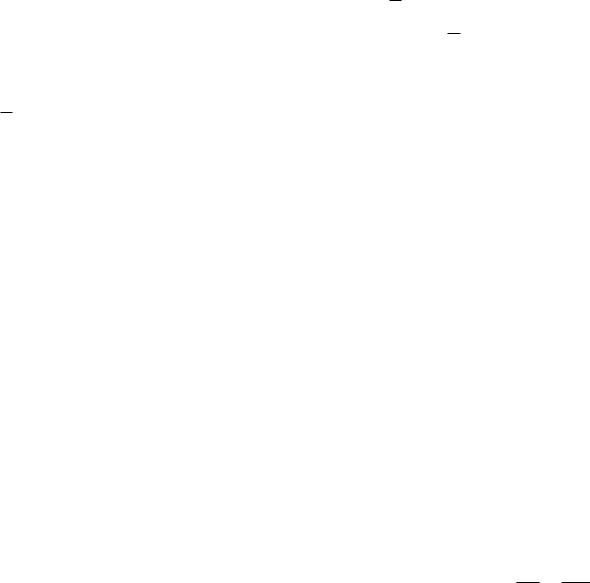
ПРИМЕР 1. Пример кинематической схемы механизма, полностью приготовленной к исследованию, приведен на рис. 2.
Данный плоский рычажный механизм относится к 3 семейству, следовательно, степень подвижности будем определять по формуле Чебышева. Ко-
1 |
B |
2 |
5 |
|
F,G |
||
|
|
||
|
|
|
|
|
|
|
3 |
1 |
|
|
|
A |
1 |
C,D |
H |
|
|
|
0 |
0 |
|
|
|
|
0 |
|
|
|
4 |
|
|
Е |
|
|
|
|
|
|
|
Рис. 2. Кинематическая схема механизма |
|
|
личество подвижных звеньев n = 5. Количество кинематических пар p5 = 7
(A-G), p4 = 0. Степень подвижности
w 3 n 2 p5 p4 3 5 2 7 0 1,
Следовательно, в данном механизме будет лишь один начальный механизм. В качестве начального мы выбрали звено 1. За обобщенную координату удобно выбрать угол поворота начального звена 1. Звеньев с местной подвижностью (которые можно удалить без нарушения правильного функционирования механизма) нет. При синтезе механизма использовались структурные группы только второго класса, следовательно, класс механизма
– второй. При вычерчивании структурной схемы механизма необходимо учесть, что звенья 1, 3 и 5 образуют кинематическую пару со стойкой, и все
6

звенья последовательно образуют кинематические пары друг с другом. Таким образом, структурной схемой для данного механизма будет следующая
(рис. 3).
|
|
|
2 |
|
|
|
4 |
|
|
|
|
1 |
|
|
3 |
|
|
5 |
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3. Структурная схема механизма
3. Расчет кинематических характеристик исполнительного механиз-
ма
3.1. Планы положений механизма строятся способом засечек. Количество положений – 8-12 (через 45-30 ). Направление вращения входного (начального) звена назначается по усмотрению студента. Прежде чем приступить к вычерчиванию положений на листе, рекомендуется построить несколько положений для тренировки без учета размеров.
В начале построения рекомендуется нанести неподвижные точки и направляющие. Затем вычерчиваются траектории движения точек, для которых они могут быть построены: прямые – для поступательного движения, окружности или дуги окружностей - для вращательного движения вокруг неподвижной точки (точка принадлежит кривошипу или кулисе). Механизм вычерчивается от начального звена к выходному звену. Рекомендуется строить сразу все положения каждой кинематической пары, нумеровать их, и только после этого переходить к следующей кинематической паре.
Все положения нумеруются в направлении вращения начального звена. За нулевое положение принимается крайнее правое положение этого звена на горизонтальной оси.
Вспомогательные построения (засечки, траектории точек и т.д.) на листе сохранить, не вытирать. Номера положений (отмечаются нижним индексом у каждой кинематической пары) проставляются на данном этапе тонким карандашом, поскольку далее эти номера будут изменены.
3.2. Определение аналогов скоростей
В заданиях на РГР использованы механизмы только со структурными группами второго класса (двухзвенные, с вращательными и поступательными кинематическими парами), исключая некоторые задания повышенной сложности.
7

Вкинематическом анализе удобно определять не скорости, а аналоги скоростей, поскольку это позволяет отказаться от привязки к угловой скорости начального звена и определять кинематические характеристики только в зависимости от обобщенной координаты. Последовательность кинематического анализа при этом не изменяется, не изменяются и составленные уравнения. Отличие плана скоростей от плана аналогов скоростей в определении длины первого вектора. На плане аналогов его длина равна длине начального звена в выбранном масштабе.
Вслучае затруднения рекомендуется задаться значением угловой скоро-
сти начального звена 1 = 1 с-1, составить уравнения, построить планы скоростей, а затем из всех вычислений и масштабных коэффициентов убрать
1/с.
Исходя из определения плана скоростей (см. глоссарий), необходимо задаться некоторым множеством точек, для которых и будет построен план аналогов скоростей. Звенья механизма содержат бесконечное множество точек. Какие же точки следует выбирать? Из теоретической механики известно, что для определения скорости любой точки тела необходимо и достаточно знать скорости двух других точек этого тела. То есть необходимое количество точек – это 2n, где n – количество подвижных звеньев. Удобнее в качестве таких точек выбирать точки в местах кинематических пар. Это позволит уменьшить количество составляемых уравнений, так как точки соединения подвижных звеньев со стойкой имеют нулевую скорость (такие точки на плане скоростей размещаются в полюсе), а остальные точки принадлежат обоим соединяемым звеньям. Таким образом, достаточное количество точек не превышает количества кинематических пар за вычетом неподвижных точек.
Учитывая вышесказанное, при кинематическом анализе вектора аналогов скоростей определяются, начиная с точек первого (начального) звена и заканчивая точками последнего (выходного) звена. Можно заметить, что траектории этих точек уже отмечены на плане положений механизма, и определение аналогов скоростей идет в той же последовательности, что и построение кинематической схемы механизма.
Построение планов аналогов скоростей основывается на сложном движении точки. Общее уравнение построений следующее
VН VИ VНИ ,
где VН - скорость «неизвестной» точки (скорость этой точки необходимо определить), VИ - скорость «известной» точки (она уже имеется на плане), VНИ - скорость неизвестной точки относительно известной.
У неизвестной точки направление вектора скорости устанавливается, исходя из траектории ее движения: если точки принадлежат одному звену
8
(«связаны» звеном), вектор относительной скорости перпендикулярен этому звену; если точки принадлежат одной кинематической паре (поступательной), вектор относительной скорости параллелен направляющей. Линия, вдоль которой будет откладываться вектор VН , проводится через полюс.
Линия, вдоль которой будет откладываться вектор VНИ , проводится через
«известную» точку «И». Точка пересечения этих линий и будет искомой точкой «Н». Вектор, соединяющий ее с полюсом, будет искомым вектором VН . Полюс плана аналогов скоростей обозначается pV , а вектора анало-
гов скоростей – строчными латинскими буквами.
Необходимо сказать, что такое упрощение построений допустимо только для механизмов со степенью подвижности w = 1. Общий метод построения плана скоростей (но не плана аналогов скоростей) описан в Приложении 3.
ПРИМЕР 2. При построении схемы, показанной на рис. 2, сначала были определены положения точек A,D и направляющей F. Точки A и D попадут в полюс, как неподвижные, через полюс пройдет и прямая, параллельная направляющей F, поскольку она определяет направление абсолютного движения ползуна. Затем была вычерчена траектория движения точки B – окружность. Учитывая, что звено AB является начальным, вектор (аналога) скорости этой точки откладывается из полюса. Далее определялось положение звена BE, что невозможно сделать, не соединив точку B с точкой D, так как в ползуне точка D2, принадлежащая шатуну BE, совершает прямолинейное движение. Вывод – необходимо составить уравнение для определения (аналога) скорости точки D2. В полюсе, таким образом, окажутся точки D3 и D0 – ползун и стойка неподвижны. Если для одного звена известны (аналоги) скорости двух точек, для всех остальных точек их (аналоги) скорости определяются методом подобия. То есть на продолжении линии bd на плане
(аналогов) скоростей будет располагаться точка e, так что bdbe BDBE . После
определения положения точки E, методом засечек определяется положение точки F. Вывод – необходимо составить уравнение для определения (аналога) скорости точки F.
В расчетно-пояснительной записке подробно описывается (со всеми расчетами) построение плана аналогов скоростей для одного положения механизма. По остальным положениям приводятся только результаты в таблице 2. Необходимо отметить, что на плане (аналогов) скоростей номер положения указывается только в индексе у точки полюса (например, для 5 положения - pV 5 ), или в случае, если в одной точке совпадают проекции точек с
разными движениями (как в примере d0 d3 d2 ).
9
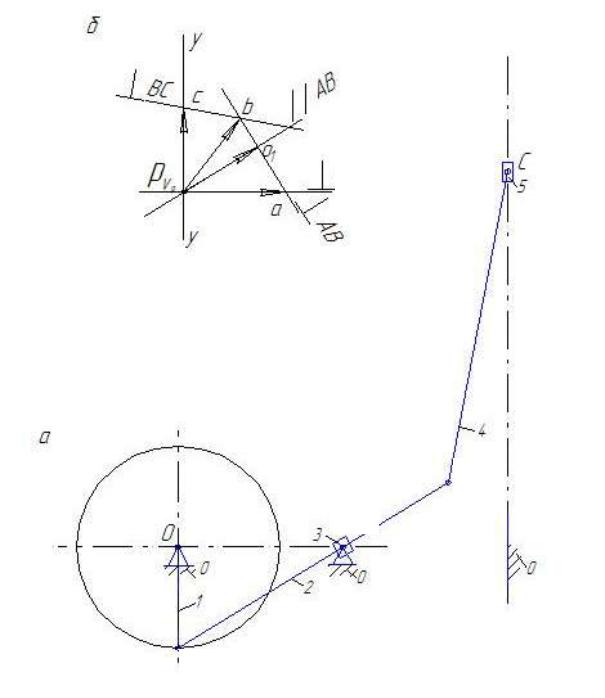
ПРИМЕР 3. На рис.4,а показано 9-е положение механизма (из 10-ти для схемы на рис.2), а на рис.4,б - план аналогов скоростей основных точек механизма.
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
//BE |
|
|
|
|
|||
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
d2 |
|
|
|
AB |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
BE |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E
|
D |
|
А |
||
|
||
|
|
B
Рис. 4. Построение плана аналогов скоростей а) положение механизма; б) план аналогов скоростей.
Последовательность определения аналогов скоростей
10