

Термех / Динамика_точки
.pdfСила трения равна F = fN, нормальная реакция N = mg cosα , тогда
F = fmg cosα .
Дифференциальное уравнение после сокращения на m принимает вид
|
|
|
|
d 2 x |
= g sinα − fg cosα . |
|
|
|
|
dt 2 |
|
|
d 2 x |
|
dVx |
|
|
Заменим |
на |
, получим |
|||
|
dt 2 |
|
dt |
|
|
dVdtx = g sinα − fg cosα .
Разделим переменные, умножив обе части уравнения на dt:
dVx = (g sinα − fg cosα)dt
Проинтегрировав, найдем
Vx = g (sinα − f cosα) t +С1 .
Подставив в это уравнение начальные значения t = 0, Vx =V0, получим
С1= V0.
Следовательно,
Vx = g(sinα − f cosα) t +V0 .
Заменим Vx = dxdt , получим
dxdt = g (sin α − f cosα) t +V0 .
Для разделения переменных умножим обе части этого уравнения на dt:
dx = g(sinα − f cosα) tdt +V0dt .
После интегрирования
x = g(sin α − f cosα) |
t 2 |
+V0t +C2 . |
|
2 |
|||
|
|
Подставив в это уравнение значения t = 0, x0 = 0, найдем С2= 0. Окончательно,
x = g(sin α − f cosα) |
t 2 |
+V0t . |
|
2 |
|||
|
|
11

Движение под действием силы, зависящей от времени.
Пусть на материальную точку действует сила F = F (t) , параллельная начальной скорости точки V0 . Движение точки будет прямолинейным.
Дифференциальное уравнение движения груза имеет вид
|
|
|
|
|
d 2 x |
|||
|
|
|
|
m |
|
|
= Fx (t) |
|
|
|
|
|
dt |
2 |
|||
|
|
|
|
|
|
|
||
|
Решение этого уравнения выполним в два этапа. Сначала сделаем за- |
|||||||
мену |
d 2 x |
= |
dVx |
и получим дифференциальное уравнение первого порядка, в |
||||
dt 2 |
dt |
|||||||
|
|
|
|
|
|
|||
котором неизвестной функцией будет проекция скорости Vx на ось х:
m dVdtx = Fx (t).
Умножив обе части уравнения на dt, разделим переменные:
mdVx = Fx (t) dt.
После интегрирования получим
|
m ∫ |
|
|
|
||
Vx = |
1 |
|
Fx (t)dt +C1 . |
|||
|
||||||
На втором этапе заменим Vx |
= |
dx |
и снова получим дифференциальное |
|||
dt |
||||||
|
|
|
|
|
||
уравнение первого порядка теперь уже относительно координаты х.
dxdt = m1 Ф +С1 ,
где Ф = ∫Fx (t)dt1 .
Снова разделим переменные:
dx = ( m1 Ф +C1 )dt ,
Проинтегрируем обе части этого уравнения и получим зависимость координаты х от времени
x = m1 ∫Фdt +C1t +C2 .
12
Для определения постоянных С1 и С2 подставим в уравнения для х и Vx начальные условия движения точки.
Движение под действием силы тяжести и силы сопротивления
Сила сопротивления пропорциональна скорости.
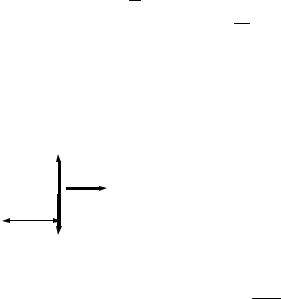
O
R z
М
mg
z
Рис.5
Заменим
Пусть точка из состояния покоя движется вертикально вниз под действием силы тяжести mg (рис. 1.5) и силы сопротив-
ления R = −kV .
За начало оси z, направленной вертикально вниз, выберем
начальное положение точки, тогда при t = 0, z0 = 0, |
z |
0 = 0 . |
|
& |
|
Составим дифференциальное уравнение движения точки
md 22z = mg − kVz . dt
d 2 z |
|
dV |
|
|
= |
z |
, сократим на m и, обозначив k/m = n, получим |
dt 2 |
dt |
||
dVdtz = g −nVz .
Для того, чтобы разделить переменные в этом уравнении, умножим обе части уравнения на dt и разделим на множитель ( g −kVz ), после чего получим
|
|
|
|
dVz |
|
|
= dt . |
|
|
|
|||
|
|
|
g −nVz |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
∫ |
|
dVz |
|
|
= |
∫ |
dt +С1 . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
gn −Vz |
|
|
|
|
||||||
После интегрирования − |
1 |
ln(g −nVz ) = t +C1 . |
|
|
|
||||||||
|
|
|
|
||||||||||
|
|
|
|
|
n |
|
|
|
|
1 ln g . |
|||
Подставим начальные условия:t = 0, Vz = 0, получим, |
С1 |
= − |
|||||||||||
|
|
1 ln(g −nVz ) = t − |
1 ln g . |
|
|
n |
|||||||
Тогда |
− |
|
|
|
|||||||||
|
|
n |
|
|
|
|
|
|
k |
|
|
|
|
Преобразуем полученное уравнение:
13

(ln(g −nV |
z |
) −ln g = −nt , |
ln |
g − nVz |
= −nt , |
откуда |
g −nVz |
=e−nt . |
|
g |
|||||||||
g |
|||||||||
|
|
|
|
|
|
Следовательно, скорость точки
Vz = gn (1−e−nt ) .
Как следует из полученной формулы, скорость падения убывает и при
t→ ∞ принимает максимальное значение Vz = g/n =mg/k . |
|
dz |
|
|
Для того, чтобы найти уравнение движения точки, заменим |
Vz = |
, |
||
dt |
||||
|
|
|
получим дифференциальное уравнение первого порядка относительно переменной координаты z:
dzdt = gn (1−e−nt ) .
Для разделения переменных умножим обе части этого уравнения на dt, получим
|
dz = |
g |
(1 −e−nt )dt , |
||||||
|
n |
||||||||
|
|
|
|
g |
|
|
|||
|
∫dz = ∫ |
(1−e−nt )dt +C2 . |
|||||||
|
n |
||||||||
Откуда |
z = |
g |
(t + |
e−nt |
) +C2 . |
||||
n |
|
n |
|||||||
|
|
|
|
|
|
|
|||
Подставим начальные значения t=0, z = 0 и определим C2= − ng2 . Окончательно уравнение движения материальной точки принимает вид
z = gn (t + n1 (e−kt / m −1)) .
Сила сопротивления пропорциональна квадрату скорости
Материальная точка под действием силы тяжести падает вниз. На нее
действуют (рис. 1.5) силы: mg и R = −kVV , где k – постоянный коэффициент. Пусть в начальный момент скорость точки V0 = 0, ось z направим вертикально вниз, начало отсчета выберем в начальном положении точки, z0 = 0. Найдем скорость точки.
Дифференциальное уравнение движения точки в проекции на ось z
14
|
|
|
|
|
|
|
m |
d 2 z |
|
= mg −k Vz2 . |
|||
|
|
|
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|
dt |
|
|
||
|
d 2 z |
|
dV |
|
|
|
|
|
dVz |
2 |
|||
Так как |
|
|
= |
|
z |
, то |
m |
|
|
|
|
= mg −k Vz . |
|
|
|
|
|
dt |
|
||||||||
dt |
2 |
|
|
|
|||||||||
|
|
dt |
|
|
|
|
|
||||||
Сократим уравнение на m и преобразуем левую его часть, умножив и разделив ее на dz:
|
dVz dz |
|
Vz dVz |
, заменим |
|
|
|
|
dz |
, |
получим |
Vz dVz |
|
|
k |
2 |
, |
|||||||
|
|
|
|
= |
|
|
Vz |
= |
|
|
|
|
= g − |
|
Vz |
|||||||||
|
dt dz |
|
dz |
dt |
|
dz |
m |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Разделим переменные, умножив обе части этого уравнения |
на dz и |
|||||||||||||||||||||||
разделив их на ( g −nVz2 ), |
обозначим |
n = |
|
k |
|
: |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
Vz dVz |
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
= dz . |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
g −nVz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Интегрируем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
V dV |
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||
∫ |
z z |
= ∫ |
dz +C1 ; − |
|
ln(g |
−nVz |
) = z +C1 . |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
g −n Vz2 |
n |
|
|
|
|
|
||||||||||||||||||
Подставим в это уравнение начальные значения z = 0, Vz = 0, получим
C1 = −1n ln g .
Тогда |
1 |
ln |
g |
= z , откуда |
V |
z |
= |
g |
(1 −e−nz ). |
|
g −nVz2 |
n |
|||||||
|
n |
|
|
|
|
||||
Полученное уравнение определяет проекцию скорости материальной
точки в зависимости от ее положения. С возрастанием z величина е−nt убывает, стремясь к нулю при z → ∞. Отсюда следует, что скорость падения с возрастанием z возрастает, стремясь к постоянной величине. Эта величина
называется предельной скоростью падения Vпр = |
g |
= |
mg . |
|
n |
|
k |
Движение под действием силы, зависящей от положения точки.
Пусть на материальную точку М, находящуюся на горизонтальной плоскости (рис.6), действует сила P , пропорциональная расстоянию от не-
15
подвижного центра О, коэффициент пропорциональности зависит от массы точки, поэтому силу P можно представить векторной формулой:
|
|
|
|
|
|
|
|
|
|
= k 2m OM |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|||
|
Проекция этой силы на ось х равна Рx= k2m x. |
на расстоянии а от на- |
|||||||||||||||
|
|
В начальный момент точка находилась в покое |
|||||||||||||||
чала отсчета, т.е. при t=0, x0=a, Vx = 0. |
|
|
|
||||||||||||||
|
|
N |
|
|
|
На |
точку, |
кроме |
силы отталкивания, |
||||||||
|
|
|
|
|
действуют |
сила |
тяжести mg и нормальная |
||||||||||
O |
|
|
|
|
М Р |
x |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
реакция |
|
|
, |
проекции которых на ось х равны |
|||
|
|
x |
|
|
|
|
N |
||||||||||
|
|
|
|
|
нулю. |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
mg |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Составим дифференциальное уравнение: |
||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
Рис.6 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
md 22x = k 2mx . dt
Сократим на m: |
&& |
−k |
2 |
x =0 |
x |
|
Полученное уравнение является однородным линейным уравнением второго порядка с постоянными коэффициентами. Составим соответствующее характеристическое уравнение:
r 2 −k 2 = 0 .
Откуда r1,2 = ±k .
Учитывая, что корни характеристического уравнения являются действительными, решение дифференциального уравнения запишется в виде
x = C ekt +C |
e−kt |
. |
(а) |
|
1 |
2 |
|
||
Для определения постоянных интегрирования С1 и С2 нужно иметь два уравнения. Дифференцируя по времени выражение (а), получим:
|
|
& |
|
|
|
|
kt |
−C2 ke |
−kt |
. |
|
|
|
|
|
|
|
(б) |
||
|
|
x = C1ke |
|
|
|
t= 0, |
x0=a, x0 = 0 |
|||||||||||||
Подставим в (а) и (б) начальные условия |
и получим |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
a =C1 +C2 , |
|
0 =C1 - C2. |
|
|
|
|
|
|
|
|||||||
Откуда С1 = С2 = |
|
a |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
После подстановки С1 и С2 |
в уравнения (а) и (б) |
получим уравнение |
||||||||||||||||||
движения материальной точки |
и зависимость скорости точки от времени: |
|||||||||||||||||||
x = |
a |
(e |
kt |
+e |
−kt |
) , |
|
|
& |
= |
ak |
(e |
kt |
−e |
−kt |
) . |
|
|||
2 |
|
|
|
|
|
|
Vx = x |
2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
16

Учет силы трения.
Решим предыдущую задачу, учитывая силу трения F= - f N, где f коэффициент трения, N - нормальная реакция.
Дифференциальное уравнение движения точки в этом случае имеет вид
|
|
|
|
&& |
= mk |
2 |
x − fN . |
|
|
|
|
|
|
|
|
|
|
|
|
mx |
|
|
|
|
|
|
|
|
|
||
|
N |
М |
|
|
Нормальная реакция N = f mq (рис.7), тогда |
||||||||||
|
F |
Р |
x |
|
|
|
mx = mk |
2 |
x − fmg . |
|
|||||
O |
|
|
|
|
|
|
|
&& |
|
|
|
|
|
|
|
x |
|
|
|
После сокращения на m получим |
|
||||||||||
|
mg |
|
|
|
|||||||||||
|
|
|
|
|
|
&&+ |
k |
2 |
x |
= |
fq . |
(а) |
|||
|
|
|
|
|
|
|
x |
|
|
|
|||||
|
Рис.7 |
|
|
|
Общее решение этого неоднородного линей- |
||||||||||
|
|
|
|
ного дифференциального уравнения равно сумме |
|||||||||||
&& |
+ k |
2 |
x = 0 и |
общего решения х1 соответствующего однородного уравнения x |
|
частного решения х2 уравнения (а), т.е. x = x1 + x2 .
x1 =C1ekt +C2e−kt .
Частное решение х2 ищем в форме правой части уравнения (а), т.е. в виде постоянного: x2 = A , тогда &x&2 = 0 . Подставим х2 в уравнения (а), получим
0 + k 2 A = fg |
, тогда |
A = |
fg |
|
k 2 |
||||
|
|
|
|
|
|
|
|
x |
= C ekt +C |
e−kt + |
fg |
|
|
|
|
|
(б) |
|||||||||||
Окончательно |
k 2 . |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||
Для определения постоянных С1 и С2 |
находим |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
& |
|
|
|
kt |
−C2 ke |
−kt |
. |
|
|
|
|
|
|
|
(в) |
||||||
|
|
|
|
|
x = C1ke |
|
|
|
|
|
|
x0 = a, x0 = 0 , |
||||||||||||||
Подставив в (б) и (в) начальные условия t =0, |
получим |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
a = C1 +C2 |
+ |
fg |
, 0 = C1k −C2 k . |
|
|
|
||||||||||||||
|
|
|
|
|
2 |
|
|
|
||||||||||||||||||
|
|
|
|
1 |
|
|
fg |
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
Откуда C1 = C2 = |
(a − |
) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
k 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Внесем значения С1 |
|
и С2 в уравнения (б) и (в) и |
получим уравнение |
|||||||||||||||||||||||
движения точки и проекцию ее скорости на ось х |
в зависимости от времени |
|||||||||||||||||||||||||
x = |
1 |
(a − |
|
fg |
)(ekt |
+e−kt ) + |
|
fg |
|
, |
|
|
Vx = x& = |
k |
(a − |
fg |
)(ekt |
−e−kt ). |
||||||||
|
|
2 |
2 |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|||||||||||||||||||
2 |
|
k |
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
2 |
|
k |
|
||||
17
Криволинейное движение материальной точки
Пусть равнодействующая всех приложенных к материальной точке сил и начальная скорость точки лежат в одной плоскости.
Выберем эту плоскость за плоскость движения с системой координат
F |
= 0 |
, z |
= |
& |
= |
0. |
Переменными координатами являют- |
|||
Оху, тогда ∑ kz |
|
|
|
0, z0 |
|
|||||
ся х и у. В начальный момент при |
t =0, x = x0, y = y0 , x = x0 , |
y = y0 . |
||||||||
|
|
|
|
|
|
|
|
|
& & |
& & |
Движение точки в этом случае определяется двумя дифференциальными |
||||||||||
уравнениями: |
|
|
|
|
|
|
|
|
|
|
|
m |
d 2 |
x |
|
= ∑F , |
|
|
|
||
|
dt |
2 |
|
|
|
|||||
|
|
|
|
|
kx |
|
|
(9) |
||
|
|
|
d 2 |
y |
= ∑F . |
|
|
|||
|
m |
|
|
|
||||||
|
dt |
2 |
|
|
|
|||||
|
|
|
|
|
ky |
|
|
|
||
Проинтегрировав эти уравнения, находят координаты х и у движущейся точки, как функции времени, т.е. определяют уравнения движения. Полученные решения содержат четыре постоянных интегрирования С1, С2, С3 и С4, значения которых определяются начальными условиями. Окончательно, решение дифференциальных уравнений представляют собой уравнения дви-
жения точки x = x(t), |
y = y(t). |
Уравнения движения |
позволяют определить все кинематические харак- |
теристики движения точки: траекторию, скорость, полное, касательное, нормальное ускорения и радиус кривизны траектории.
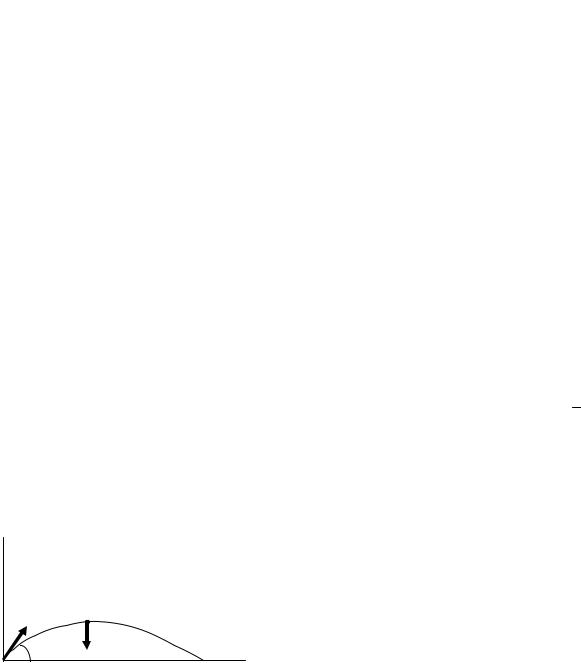
Движение точки, брошенной под углом к горизонту.
Пусть материальная точка массой m получила начальную скорость V0 , направленную под углом α к горизонтальной плоскости, при этом сопротив-
ление воздуха во внимание не принимаем. |
|
|
|
|
|
||||||
|
Поместим начало координат О |
в начальном положении точки, ось Оу |
|||||||||
направим вертикально, ось |
Ох расположим горизонтально в плоскости, |
||||||||||
у |
|
|
|
проходящей через ось Оу и начальную |
|||||||
|
|
|
|
|
|
|
|
||||
|
|
|
скорость V0 (рис.8). |
|
|
||||||
|
|
|
|
На материальную точку М действу- |
|||||||
|
V0 |
М |
|
ет сила тяжести mg . |
|
|
|||||
|
|
Дифференциальные |
|
уравнения |
|||||||
|
mg |
|
|
||||||||
О |
α |
х |
движения точки имеют вид: |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
d 2 x |
= 0, m |
d 2 y |
= −mg . |
|
|
|
Рис.8 |
|
|
|
dt |
2 |
dt 2 |
|||
|
|
|
|
|
|
|
|
||||
18
Сделаем замену: |
|
|
|
d 2 x |
= |
dV |
d 2 y |
= |
dVy |
. |
|||
|
|
|
|
|
|
x |
, |
|
|
||||
|
|
|
dt 2 |
|
dt |
dt 2 |
dt |
||||||
После сокращения на m, получим |
|
|
|
|
|||||||||
|
dV |
x |
= 0, |
dVy |
|
= −g. |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
dt |
|
dt |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Умножая обе части этих уравнений на dt и интегрируя, находим |
|||||||||||||
Vx = C1, |
Vy= - gt+C2. |
|
|
|
|
|
|
(а) |
|||||
Эти уравнения справедливы при любом значении t.
При t = 0, xo = 0, Vx = Vo cos α, Vy =Vosin α.
Следовательно, С1= Vo cos α, С2= Vo cos α.
Подставим эти значения в (а), и заменяя Vx = dxdt , Vy = dydt получим
dx |
=V0 cosα, |
dy |
=V0 sinα − gt. . |
(б) |
|
dt |
dt |
||||
|
|
|
Полученные уравнения определяют проекции скорости на оси коорди-
нат:
Vx =V0 cosα, |
Vy =V0 sinα − gt. |
Модуль скорости
V = Vx2 +Vy2 = V02 cos2 α +(V0 sinα − gt)2 . |
(в) |
Интегрируя уравнения (б), получим
x = V0 t cosα + C3, y = V0 t sinα – 0,5 gt2 + C4.
Поставим в эти уравнения начальные условия х0 = 0, у0 = 0, найдем, что С1 = С2 = = 0. Тогда окончательно определяем уравнения движения точки
М:
x = V0 t cosα, y = V0 t sinα – 0,5 gt2.
Методами кинематики определим все характеристики этого движения.
19

1. Траектория точки. Исключим из уравнений (б) время t, для этого выразим t из первого уравнения и подставим во второе:
t = |
|
|
x |
, |
у = xtgα − |
|
g |
|
x2 . |
(г) |
|
V |
0 |
cosα |
2V 2 |
cos2 |
α |
||||||
|
|
|
|
|
|||||||
|
|
|
|
|
0 |
|
|
|
|
Уравнение (г) является уравнением параболы.
2.Дальность полета точки. Определим дальность полета точки, положив
вэтом уравнении у = 0.
xtgα − |
|
g |
|
x |
2 |
= 0 |
, отсюда х1 = 0, x2 = |
2V0 2 cos2 α |
tgα . |
|||
|
|
|
|
g |
||||||||
2V 2 |
cos2 |
α |
|
|||||||||
|
|
|
|
|
|
|
|
|
||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Значение х1 дает точку О, |
значение х2 определяет еще одну точку С пересе- |
|||||||||||
чения параболы с осью О х, расстояние ОС = L |
определяет дальность полета |
|||||||||||
точки |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
L = |
V0 |
sin 2α |
. |
|
|
||||
|
|
|
|
|
|
g |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
При заданной начальной скорости максимальная дальность получается, если sin2α =1, т.е. при угле α = 450.
3.Высоту полета определим, подставив в уравнение траектории движе-
ния точки значение |
x = L / 2 = |
V 2 |
sin 2α |
: |
||||
|
O |
|
||||||
|
|
g |
||||||
|
|
|
|
|
|
|
|
|
H |
= |
V 2 |
sin2 α |
|
|
|||
|
O |
|
|
|
|
|
||
|
|
2g |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
4. Время полета. Подставим вместо x значение L дальности полета в уравнение x = V0 t cosα , и найдем время полета
T= 2V0 gsinα .
5.Скорость полета определяется формулой (б). После подстановки в нее время полета, получим, что скорость, в момент приземления по модулю будет равна начальной скорости.
В частности, если α = 450 , VO = 28,3 м/c, то L ≈ 81,6 м; H ≈ 20,4 м; T ≈ 4 c. Траектория движения точки для этого случая построена с помощью программы Microsoft Excel (рис.9).
20