

Министерство образования Российской Федерации. Государственное образовательное учреждение высшего профессионального
образования «САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра «Механика»
С Т А Т И К А
ТЕОРЕТИЧЕСКИЙ МАТЕРИАЛ
Данное пособие входит в серию электронных учебных пособий по теоретической механике, разрабатываемых на кафедре механики СамГТУ.
Зав. кафедрой - д.т.н., проф. Я.М.Клебанов, разработчики - Л.Б.Черняховская, Л.А.Шабанов.
Программа предназначена для самостоятельного изучения студентами раздела «Статика».
Самара – 2006
1.ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ
1.1. Реальные физические тела в результате действия на них других тел меняют свою форму и размеры, т.е. деформируются. Однако, такие деформации, как правило, незначительны и не влияют на движение тела, поэтому в механике ими пренебрегают и считают рассматриваемые тела абсолютно твердыми.
Абсолютно твердым называется такое тело, расстояния между двумя любыми точками которого остаются неизменными независимо от действий на него других тел.
Для краткости термин абсолютно твердое тело заменяется термином «твердое тело» или просто «тело».
1.2. Состояние движения или покоя данного тела зависит от механических взаимодействий с другими телами. Мерой такого взаимодействия является сила.
Силой называется векторная величина, определяющая меру механического взаимодействия двух тел.
Характеристиками действия силы являются: а) численное значение силы или ее модуль; б) направление силы; в) точка ее приложения.
Линией действия силы называется прямая, вдоль которой действует
сила.
в |
в |
|
F |
||
F |
||
А |
А
а
а
Рис.2.
Рис.1
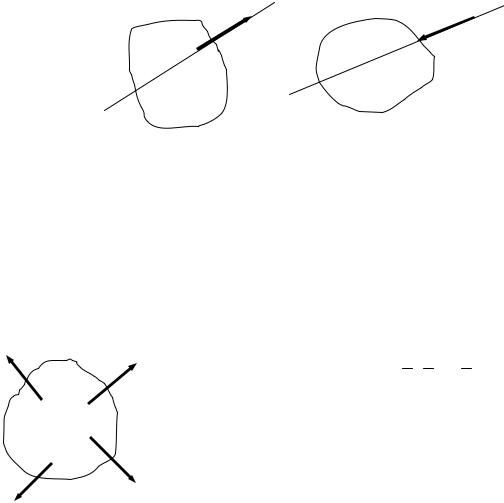
Графически сила изображается направленным отрезком, длина которого в выбранном масштабе выражает модуль, а начало вектора совпадает с точкой приложения силы (рис.1). Иногда точку приложения силы совмещают с концом направленного отрезка – острием стрелки вектора (рис.2). Линия действия силы - прямая ав.
1.3. Системой сил называется совокупность сил, приложенных к одному
F1 |
|
|
твердому телу. |
|||
|
F2 |
Систему сил, приложенных к данному твердому |
||||
|
|
|||||
|
A1 |
A2 |
телу (рис.3 ), обозначают: { |
F1 , |
F2 ,..., |
Fn }. |
|
Наиболее часто встречаются следующие системы |
|||||
|
|
|||||
|
|
A4 |
сил: |
|||
|
|
|
|
|
|
|
|
A3 |
|
F4 |
|||
F3
Рис. 3
а) система сходящихся сил, т.е. сил, линии действия которых пересекаются в одной точке; б) система параллельных сил;
в) плоская система сил, т.е. сил, линии действия которых лежат в одной плоскости.
Эквивалентными называются такие две системы сил, каждую их
которых можно заменить другой, не изменяя состояния покоя или характер |
|||||||||||||||||||||||||
движения тела: |
{ |
|
, |
|
|
Pk }∞ { |
|
|
|
Fn }. |
|||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
P1 |
P2 ,..., |
F1 , |
F2 ,..., |
||||||||||||||||||||||
Равнодействующей называется сила, эквивалентная системе сил: |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ { |
|
|
|
|
Fn }. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
F |
F1 , |
F2 ,..., |
||||||||||||
F2 |
А1 |
|
|
|
|
Уравновешенной или эквивалентной нулю называется |
|||||||||||||||||||
F1 |
|
|
|
|
|||||||||||||||||||||
|
|
система сил, под действием которой тело находится в |
|||||||||||||||||||||||
|
|
покое. { |
|
|
|
|
Fn }∞0. |
||||||||||||||||||
|
А1 |
F1 , |
F2 ,..., |
||||||||||||||||||||||
|
Рис.4. |
|
|
|
Парой сил называется система двух равных по модулю, |
||||||||||||||||||||
параллельных и направленных в противоположные стороны сил (рис.4)
Пару сил обозначают: (F1, F2 ).
1.4. Свободным называется твердое тело, не скрепленное с другими телами, которому можно сообщить из данного положения любое перемещение в пространстве.
Связями называются любые ограничения, препятствующие перемещениям тела в пространстве.
К связям относятся различного вида устройства, закрепляющие тела, и опорные поверхности.
Тело с наложенными на него связями называется несвободным. Реакцией называется сила, с которой связь действует на тело.
Направления реакций определяются свойствами связей. Реакция конкретной связи направлена в сторону, противоположную той, куда эта связь не дает телу перемещаться.
Все |
силы, действующие на несвободное тело, разделяются на две |
категории: |
активные силы и реакции связей. Силы, не зависящие от связей, |
называются активными или заданными. Реакции связей являются пассивными, поскольку они возникают в результате действия на тело активных сил.
1.5. Статика решает две задачи:
1)определяет методы эквивалентных преобразований систем сил;
2)определяет условия равновесия абсолютно твердых тел.
Равновесием в статике называется состояние покоя данного тела или нескольких тел по отношению к инерциальной системе отсчета.
Для инженерных расчетов инерциальной системой может служить система координат, связанная с Землей.
2. МОМЕНТЫ СИЛ И ЗАВИСИМОСТИ МЕЖДУ НИМИ.
Моменты сил являются мерой вращательного действия сил на тело.
2.1. Вектором моментом силы F относительно центра О называется вектор mO(F), приложенный в этом центре, направленный перпендикулярно плоскости, в которой лежат центр и сила, в ту сторону, откуда поворот силы вокруг центра виден против часовой стрелки, и равный по модулю произведению модуля силы на плечо (рис.5.)
Плечом силы относительно центра называется кратчайшее расстояние h между центром O и линией действия силы
F.
MО(F)
О |
|
F |
|
r |
В |
||
h |
|||
|
α |
||
900 |
А |
Рис.5
Следовательно, модуль вектора-момента силы равен |
|
mO ( |
|
) |
|
= |
|
|
|
h . |
||||||
|
F |
|
F |
|||||||||||||
Так как h является высотой треугольника ОАВ, то |
|
|
mO ( |
|
) |
|
|
= 2SOAB , где |
||||||||
|
F |
|
||||||||||||||
|
|
|
|
|
|
|
||||||||||
SОАВ - площадь треугольника ОАВ.
Векторный момент силы относительно центра равен векторному произведению радиуса-вектора, проведенного из центра в точку приложения силы, и вектора силы, так как эти два вектора имеют одинаковые модули и направления.
mO (F ) = r × F .
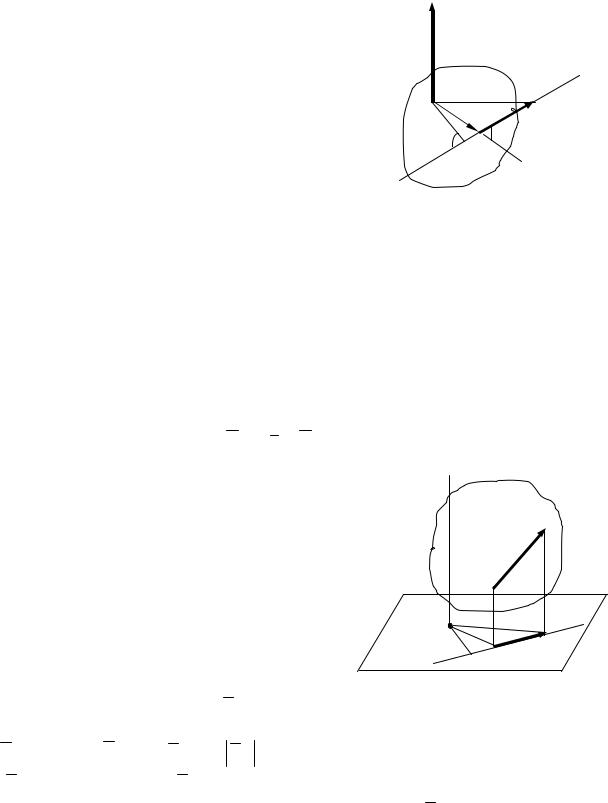
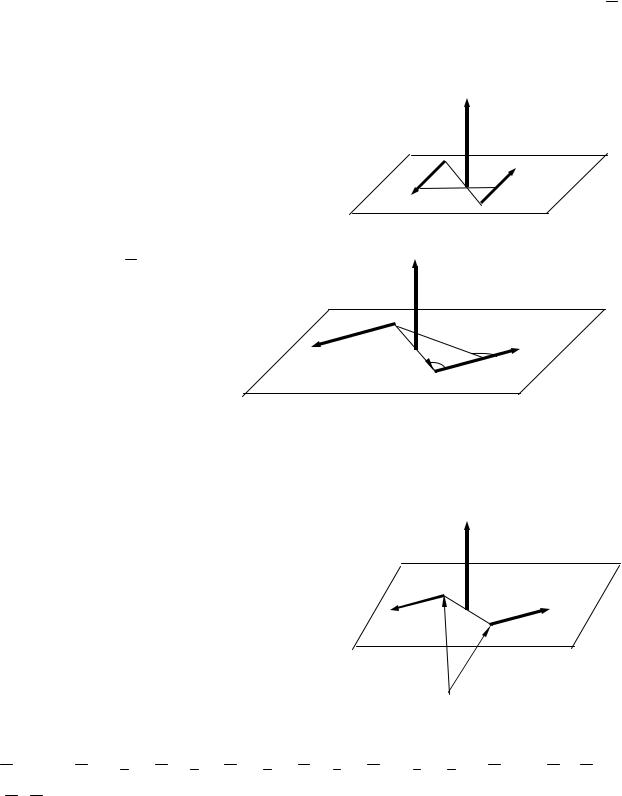
2.2 Моментом силы относительно оси называется момент проекции силы на плоскость, перпендикулярную этой оси, относительно точки пересечения оси с плоскостью (рис.6).
Момент силы относительно оси считается положительным, если проекция силы на плоскость, перпендикулярную оси, стремится повернуть тело вокруг положительного направления оси против часовой стрелки, отрицательным, если – по часовой стрелке. Момент силы F относительно оси z обозначается символом
mz (F ) . mz (F ) = mO (Fxy ) = ± Fxy h ,
z
|
|
В |
|
|
F |
|
А |
|
О |
|
xy |
|
в |
|
h |
а |
|
|
Fxy |
|
Рис.6 |
|
|
где Fxy – проекция силы F на плоскость xy, перпендикулярную оси z. Так как h является высотой треугольника Оав, то mZ (F ) = 2SOab ,
где SOab – площадь треугольника Оав.
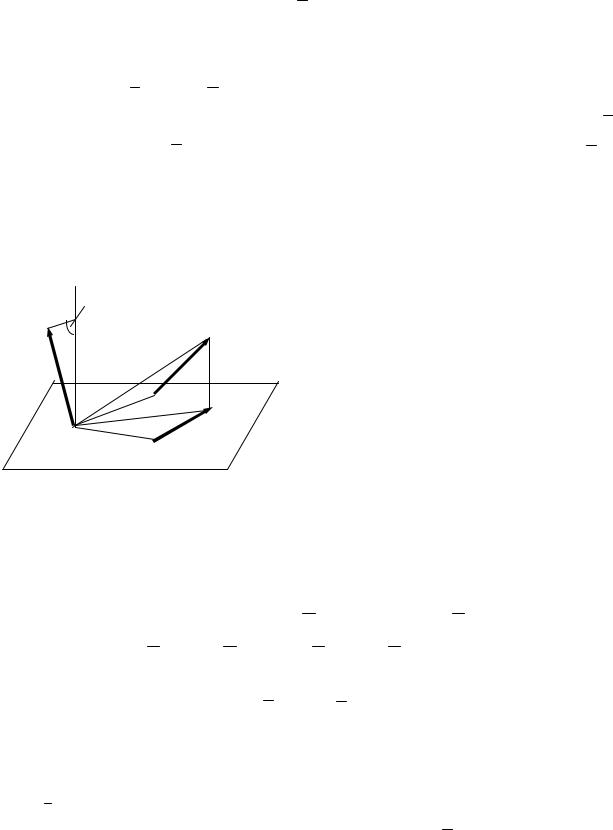
Для определения момента силы F относительно оси z нужно выполнить следующие действия:
1. провести плоскость xy, перпендикулярную оси z и указать точку О пересечения оси z с этой плоскостью;
2. найти проекциюFxy силы F на плоскость xy;
3. из точки О опустить перпендикуляр h на линию действия проекции Fxy и вычислить момент mO (Fху) как произведение модуля проекции силы Fxy на
плечо h с соответствующим знаком.
Момент силы относительно оси равен нулю, если сила параллельна оси или пересекает ось, т.е. в том случае, когда ось и действующая сила лежат в одной плоскости.
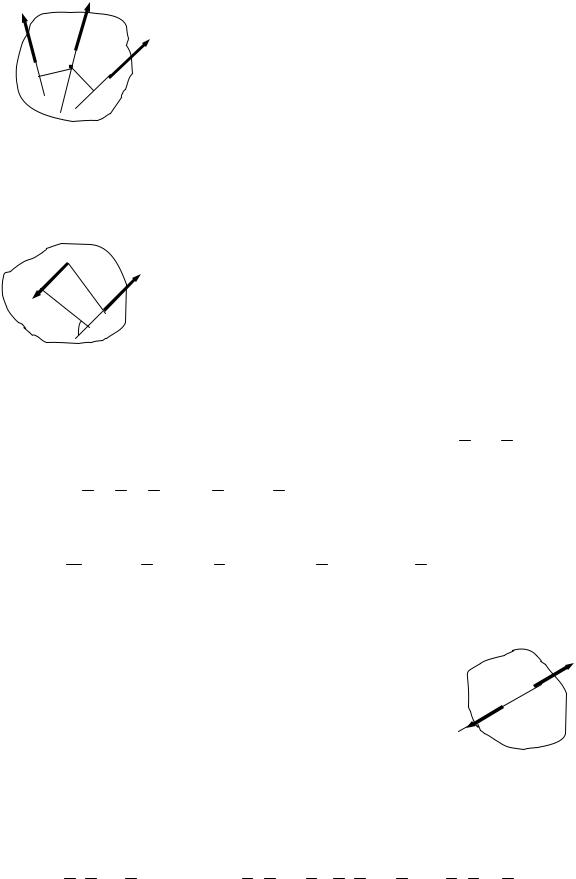
Теорема 1. Проекция векторного момента силы относительно центра на
|
|
|
z |
|
|
|
|
ось, проходящую через этот центр, |
|||||||||||||||||||||||||||
MО(F) |
90 |
|
|
|
|
равна моменту силы относительно |
|||||||||||||||||||||||||||||
0 |
|
|
|
|
|||||||||||||||||||||||||||||||
|
mOz(F) |
|
|
В |
|
этой оси. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Доказательство. |
Проведем |
|
через |
||||||||||||||||||||||
|
|
|
ϕ |
|
|
|
F |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
А |
|
|
точку О ось z и спроецируем на нее |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
вектор mO ( |
|
|
) (рис.7). Эта проекция равна: |
||||||||||||||||||||||||
|
|
|
О |
|
b |
F |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
m ( |
|
|
) = |
|
mO ( |
|
) |
|
cosϕ. |
Модуль |
|
mO ( |
|
) |
|
|||||||||||||
|
|
|
|
|
|
Fxy |
|
F |
|
F |
|
|
F |
|
|||||||||||||||||||||
|
|
|
|
|
|
a |
|
|
|
Oz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
удвоенной площади треугольника |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
равен |
|
|||||||||||||||||||||||||
|
|
|
|
Рис.7 |
|
|
|
|
ОАВ: |
|
|
|
|
|
mO ( |
|
) |
|
= 2 SOAB . |
Значит, |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
F |
|||||||||||||||||||||||||
mOz ( |
|
) = 2SOAB cosϕ. Момент силы |
|
относительно оси z |
mZ ( |
|
) = 2SOab , где |
||||||||||||||||||||||||||||
F |
|||||||||||||||||||||||||||||||||||
|
F |
||||||||||||||||||||||||||||||||||
F |
|||||||||||||||||||||||||||||||||||
треугольник Оав |
|
является |
проекцией треугольника ОАВ на плоскость, |
||||||||||||||||||||||||||||||||
перпендикулярную |
оси z. |
Значит, SOab = SOAB cosϕ , |
так |
как угол |
|
между |
|||||||||||||||||||||||||||||
плоскостями этих треугольников измеряется углом между перпендикулярами к ним, т.е. углом ϕ. Окончательно, mOz (F ) = 2SOab = mZ (F ) .
Аналогично, mOx (F ) = mx (F ) ,
mOy (F ) = mz (F ) .
2.3. Выражение момента силы относительно оси в координатной форме.
Разложим векторный момент mO (F ) силы F относительно центра О по координатным осям x, y, z, связанным с центром О.
mO ( |
|
|
) = mOx ( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
||||
F |
F |
)i |
+mOy (F ) j + mOz (F )k = mx (F )i +my (F ) j +mz (F )k. |
||||||||||||||||||||||||||||||||||||
Разложим также по координатным осям векторное произведение. |
|
||||||||||||||||||||||||||||||||||||||
mO ( |
|
) = |
|
× |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
F |
|
F |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
r |
= ( yFz − zFy )i |
+(zFx − xFz ) j +(xFy − yFx )k . |
( 2) |
||||||||||||||||||||||||||||||||||||
Сравнивая (1) и (2), получаем выражения моментов силы F относительно координатных осей.
mx = yFz − zFy ;
my = zFx − xFZ ;
mz = xFy − yFx ,
где x, y, z - координаты точки приложения силы, а Fx, Fy, Fz - проекции силы F на оси координат.
2.4. |
|
|
|
Векторным моментом пары называется вектор, направленный |
||||||||||||||||||
перпендикулярно |
|
плоскости пары в ту |
|
m( F1,F2) |
||||||||||||||||||
сторону, откуда вращение пары видно |
|
|||||||||||||||||||||
|
|
|
|
|||||||||||||||||||
происходящим против часовой стрелки, и |
|
|
|
|
||||||||||||||||||
равный по модулю произведению модуля |
А h |
|
|
F2 |
||||||||||||||||||
одной из сил пары на ее плечо. |
|
|
|
|||||||||||||||||||
|
Плечом пары называется кратчайшее |
F1 |
В |
|
||||||||||||||||||
расстояние между линиями действия сил |
Рис.8 |
|
|
|
||||||||||||||||||
пары. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Момент пары ( |
|
|
, |
|
F2 ) |
|
|
|
|
|
||||||||||||
F1 |
|
m(F1,F2 |
|
|
|
|||||||||||||||||
обозначается символом m( |
|
, |
|
|
|
) |
|
|
|
|||||||||||||
F1 |
F2 ) |
|
|
|
|
|||||||||||||||||
или |
|
. |
Модуль момента |
|
А |
|
|
|
||||||||||||||
M |
F |
|
|
|
||||||||||||||||||
пары рис.8) равен |
|
|
|
|
|
|
|
h |
90 |
0 |
F |
|||||||||||
|
|
|
|
|
|
|
|
α |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|m(F1 , F2 ) | = |
F1 |
h . |
|
|
|
|||||||||||||||||
|
В |
|
|
|
||||||||||||||||||
Векторный момент пары |
|
|
|
|
||||||||||||||||||
|
Рис. 9 |
|
|
|
||||||||||||||||||
сил |
равен |
|
|
векторному |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||
произведению |
|
|
радиуса- |
|
|
|
|
|
||||||||||||||
вектора, проведенного из точки приложения одной из сил пары в точку приложения второй, и вектора этой силы (рис.9).
m( |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
F2 ) = AB |
× F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Эти векторы равны, так как они имеют |
|
m( |
|
, |
|
|
|
|
|||||||||||||||||
|
F1 |
F2 ) |
|
|
|||||||||||||||||||||
одинаковые модули и направления. |
|
|
|
|
|
|
|
|
|||||||||||||||||
Теорема 2. Сумма |
векторных моментов |
F |
|
|
А |
|
F |
||||||||||||||||||
|
|
|
|
|
В |
||||||||||||||||||||
сил, составляющих пару, относительно |
|
|
rA |
|
|||||||||||||||||||||
любого центра равна векторному моменту |
|
|
|
|
|||||||||||||||||||||
пары (рис.10). |
|
|
|
|
|
|
|
|
|
|
|
|
|
rB |
|
||||||||||
Доказательство. Так как силы |
|
и |
|
|
|
|
|
О |
|
|
|||||||||||||||
F1 |
F2 |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10 |
|
|
||||
составляют пару, то F1 |
= −F2 . |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
Тогда
mO (F1 ) + mO (F2 ) = rA × F1 + rB × F2 = rA × F1 − rB × F2 = (rA − rB ) × F1 == BA × F1 = = m(F1 , F2 ).
2.5.Моменты для плоской системы сил
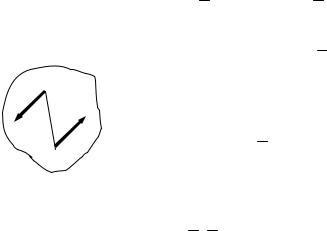
2.5.1.Алгебраическим моментом силы относительно центра называется взятое с соответствующим знаком произведение модуля силы на плечо.
|
|
|
|
|
m0(F) = ± F h. |
|
|
|
F3 |
|
Момент силы имеет знак плюс, если сила |
F2 |
А3 |
|
|
|
стремится повернуть тело вокруг центра О против |
|
|
|
F1 |
часовой стрелки (рис.11). Если линия действия |
|
|
h2 О |
h1 |
|
силы проходит через центр, то ее момент |
|
|
|
|
|||
|
А2 |
|
А1 |
|
относительно этого центра равен нулю. |
|
|
|
|
Рис. 11 |
m0(F1) =F1h1; |
|
m0(F2) = - F2 h2; |
||
|
||
|
m0(F3) = 0. |
2.5.2.Алгебраическим моментом пары называется взятое со знаком
A1 |
плюс или минус произведение модуля одной из сил пары |
||
на плечо |
(рис.12). |
||
|
|||
F1 |
|
F2 |
|
|
m( |
|
|
|
|
|
|
|
|
|
h |
F1 , F2 ) =±F1 h . |
|||||||||||||
|
A2 |
Знак плюс берется в том случае, когда пара стремится |
||||||||||||
|
900 |
|||||||||||||
|
|
повернуть тело против часовой стрелки, и минус, когда – |
||||||||||||
|
Рис.12 |
по часовой. |
||||||||||||
|
|
2.6. Главный вектор и главный момент |
||||||||||||
2.6.1.Главным |
вектором |
|
|
системы сил { |
|
, |
F2 ,..., |
Fn } называется |
||||||
R |
||||||||||||||
|
F1 |
|||||||||||||
геометрическая |
сумма всех сил системы. |
|||||||||||||
R= F1 + F2 +... + Fn = ∑Fk
2.6.2.Главным моментом МО относительно центра О называется
геометрическая сумма моментов всех сил системы относительно этого центра M O = mO (F1 ) +mO (F2 ) +... +mO (Fn ) = ∑mO (Fk ).
3. АКСИОМЫ СТАТИКИ. ЭЛЕМЕНТАРНЫЕ ОПЕРАЦИИ.
Аксиома 1. Для равновесия абсолютно |
F2 |
||||
A1 |
|||||
твердого тела под действием двух приложенных |
A2 |
||||
к нему сил необходимо и достаточно, чтобы |
F2 |
||||
силы были равны по модулю и направлены по |
|
||||
одной прямой в противоположные стороны |
Рис.13 |
||||
(рис.13). |
|
|
|
|
|
F2 = −F1 . |
|||||
Аксиома 2. Действие данной системы сил на абсолютно твердое тела не изменится, если добавить к ней или отнять от нее уравновешенную систему сил.
Если {P1 , P2 ,..., Pk }∞ 0 , то {F1 , F2 ,..., Fn , P1 , P2 ,..., Pk }∞{F1 , F2 ,...Fn }
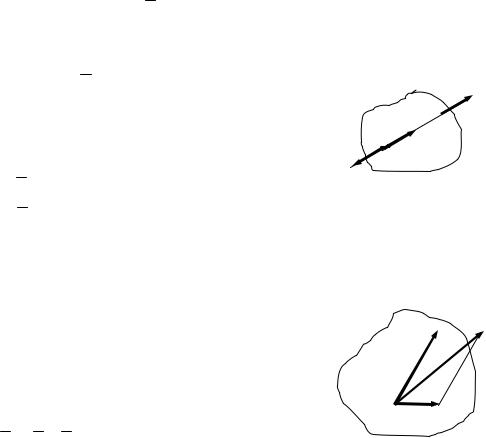
Следствие. Действие силы на абсолютно твердое тело не изменится, если перенести силу вдоль линии действия в любую точку тела (рис.14).
Доказательство. Пусть сила F приложена в точке А. Приложим в точке В, находящейся на линии действия этой силы, две равные по модулю и
противоположные |
|
по направлению |
силы |
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
. По |
|||||||||||||||||||||||||||||||
F1 |
F2 Выберем |
F1 |
= |
F2 |
|
F |
||||||||||||||||||||||||||||||||||||||||||||||
аксиоме 1 система сил { |
|
|
|
, |
F2 } ∞ 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
F |
|||||||||||||||||||||||||||||||||||||
На основании аксиомы 2 имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|||||||
|
F1 ∞{F , F1 , F2 } |
|
|
|
|
|
|
(1) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
|||||||||
Силы F и F2 также удовлетворяют аксиоме 2, |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
следовательно, { |
|
|
, |
F2 }∞ 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.14 |
|
|
|
|
|||||||||||||||||||||||||||||||||
Тогда |
|
{ |
|
|
|
|
|
|
F2 }∞ |
|
|
|
|
|
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
, |
|
|
|
|
, |
F1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
F |
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
Сравнивая (1) и (2), получаем: |
|
∞ |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
F |
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
Аксиома 3. |
|
|
|
|
|
Две силы, приложенные в одной точке, имеют |
||||||||||||||||||||||||||||||||||||||||||||||
равнодействующую, приложенную в той же точке и |
|
|
|
|
F1 |
|
|
|
|
|
F |
|||||||||||||||||||||||||||||||||||||||||
определяемую |
|
|
диагональю |
параллелограмма, |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
построенного на этих силах как на сторонах. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
Вектор |
|
|
|
|
|
, |
равный |
диагонали |
|
параллелограмма, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
построенного на векторах |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
F1 и F2 (рис. 15) называется |
А |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
геометрической суммой этих векторов. |
|
|
|
|
|
|
F2 |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
F = F1 + F2
Аксиома 4. При всяком действии одного тела на другое силы их взаимодействия равны по модулю и
направлены по одной прямой в противоположные стороны. Указанные силы приложены к разным телам, поэтому вместе они не составляют уравновешенную систему сил.
Аксиома 5. Равновесие деформируемого тела, находящееся под действием
системы сил не нарушится, если тело считать абсолютно твердым.
3.1. Элементарные операции и их свойства.
Элементарными называются операции преобразования сил, основанные на применении первых трех аксиом статики.
К элементарным операциям относятся следующие действия:
1)перенос точки приложения силы вдоль ее линии действия;
2)сложение двух приложенных в одной точке сил или разложение силы на две составляющие по правилу параллелограмма.
Свойства элементарных операций.
Применение элементарных операций при преобразовании системы сил не меняет ее главного вектора и главного момента относительно произвольной точки.