

1.3. Силы и моменты, действующие в системе электропривода
Статические моменты
Определение «статический момент»
В состав каждого электропривода входит рабочая машина, например, насос, грузо-
вая лебедка, рулевая машина и т.п.
Каждая такая машина имеет рабочий орган, предназначенный для выполнения полезной работы. К рабочим органам относят: у насоса - крыльчатку , у грузовой лебедки - крюк для подвески груза ( гак ), у рулевого устройства - перо руля и т.п.
Таким образом, к валу электродвигателя электропривода приложены два момента:
1.электромагнитный момент самого двигателя и
2. момент, создаваемый рабочей машиной и передачей ( если она есть ). Последний называется статическим моментом.
Важно подчеркнуть, что статический момент имеет чисто механический характер.
Направление действия статических моментов
В зависимости от выполняемой электроприводом операции каждый из них может быть как движущим, так и тормозным.
Движущими или положительными называют моменты, направленные в сторону движения и вызывающие или способствующие ему.
Тормозные или отрицательные моменты направлены навстречу движению и пре-
пятствуют ему.
1.4. Виды статических моментов
Различают два вида статических моментов:
1. активные ( потенциальные ) и
2.реактив-ные.
Активным называют момент, который вне зависимости от направления движения всегда действует в одну сторону. Такой момент создают, например, масса поднятого груза, силы упругости предварительного сжатых, растянутых или скрученных упругих тел и др.
В системе координат ω ( М ) связь угловой скорости ω и статического момента М
показана при помощи вертикальной линии, проходящей через 1-й и 4-й квадранты
( рис. 8.2, а ).
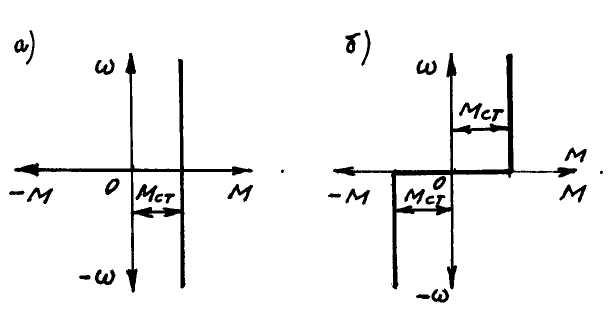
Рис. 8.2. Активный ( а ) и реактивный ( б ) статический моменты
Действительно, если считать, что активный момент создан подвешенным грузом,
то
статический момент М =G*R=const(G– вес груза,R– радиус барабана лебедки ).
=G*R=const(G– вес груза,R– радиус барабана лебедки ).
Он имеет одно и то же значениепри любой скорости, в том числе при скорости, равной нулю.
Кроме того, направление этого момента не зависитот направления перемещения груза ( вверх или вниз ), что объясняется тем, что действие силы тяжести груза также не зависит от того, поднимают или опускают груз. Как известно, сила тяжести всегда направлена к центру Земли.
Реактивным называют момент, возникающий как реакция среды на движение электромеханической системы.
Поэтому он действует только во время движения и всегда навстречу ему. Поэтому при изменении направления движения реактивный момент изме-няет направление действия и во всех случаях будет тормозным ( отрицательным ).
Такой момент создают силы трения, например, трение крыльчатки вентилятора о воздух, трение шестерней в редукторе и т.п.
В системе координат ω ( М ) связь угловой скорости ω и статического момента М
показана при помощи вертикальных линий, проходящих через 1-й и 3-й квадранты ( рис. 8.2, б ).
В общем случае статический момент представляет собой алгебраическую сумму
моментов во всех частях рабочей машины. Если в электроприводе вентилятора статиче-
ский момент создается только в результате трения крыльчатки о воздух и имеет реактив-
ный характер, то в электроприводе лебедки действую одновременно два момента – актив-
ный, созданный подвешенным грузом, и реактивный, созданный силами трения в редук-
торе и в самом двигателе.
Поэтому в общем случае статический момент механизма находится как алгебраиче
ская сумма реактивного и активного моментов, т.е.
М =
±М
=
±М ±
М
±
М (
8.1 ).
(
8.1 ).