

Fizika_Ekzamen_vip
.pdf15)Динамика тела на наклонной плоскости при наличии трения.
Сила трения возникает при относительном перемещении соприкасающихся тел. Вязкое трение - движение в газе/жидкости Fвяз=-kv, где k - коэффициент пропорциональности, который зависит от свойств жидкости.
Сухое трение: трение скольжение и трение качения(катится колесо)
Сила всегда направлена по касательной к трущимся поверхностям так, что она противодействует относительному перемещению этих тел.
Сила трения покоя - возникает при попытке вызвать перемещение тела отнсительно другого.
16)Динамика вращательного движения. Момент сил, момент импульса, момент инерции.
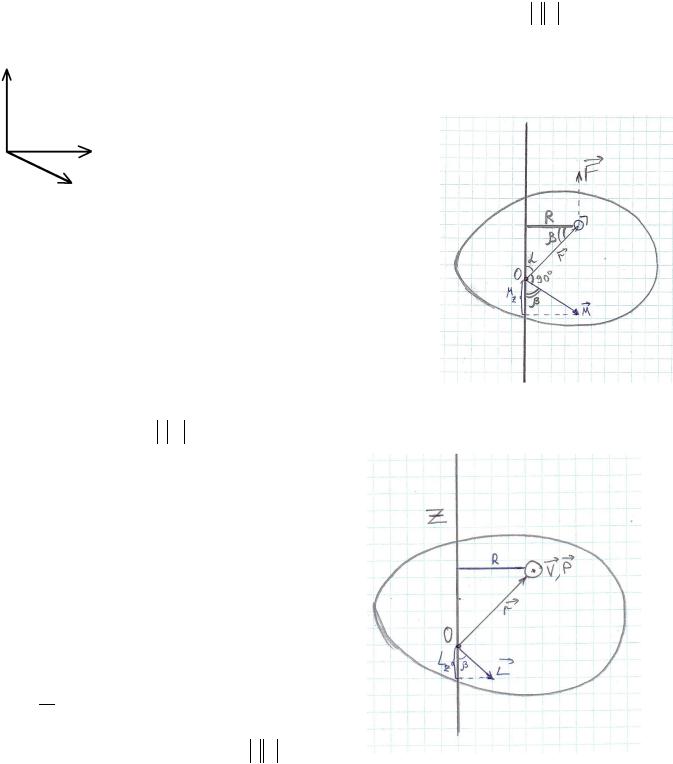
Момент силы - векторная величина, определяемая по правилу:M = r, F |
= r F sinαn |
|
|
Вектор M всегда перпендекулярен плоскости, в которой лежат векторы r и F.
MЕсли смотреть вслед вектора М, то кратчайший поворот от первого сомножителя r ко второму F должен происходить по часовой стрелке. Вектор М прикладывается к точке О.
F
r
Проекция вектора М на ось вращения называется скалярная величина, которая определяется по правилу:
MZ =  M
M cos β =
cos β =  r
r F
F sinα cos β
sinα cos β
Плечо силы - кратчайшее расстояние от линии действия силы до оси вращения.
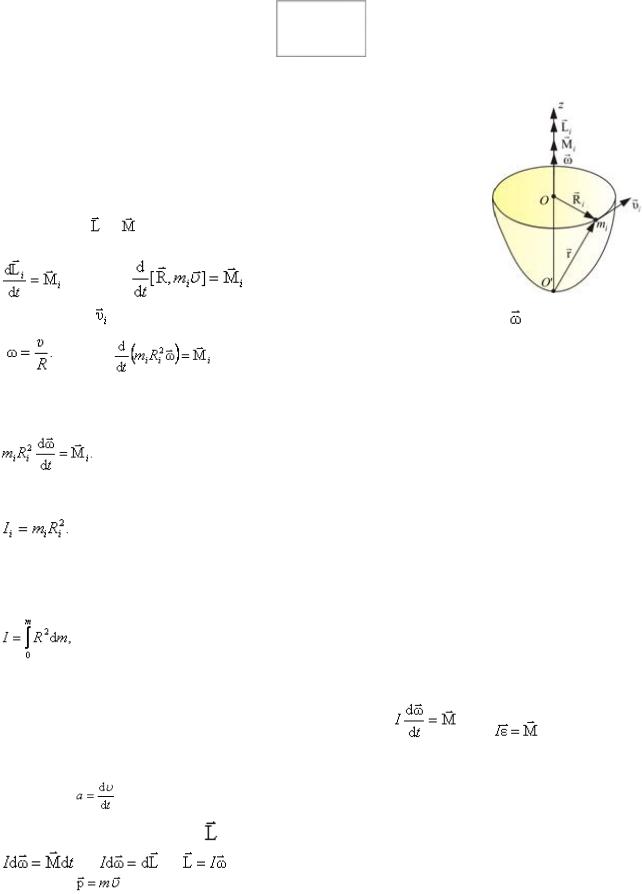
Момент импульса М.Т. - векторная величина, которая определяется по следующей
формуле: L = r, P |
= r P sinαn , где P = mv |
|
|
Проекция вектора L на ось вращения называется скалярная величина, которая определяется по правилу:
LZ =  L
L cos β =
cos β =  r
r P
P sinα cos β = PR
sinα cos β = PR
Связь между моментом импульса и силы для М.Т.
L = r, P |
|
|
|
|
|
|
|||
!" |
|
|
|
|
|
|
|
|
|
dL |
= d |
" !" |
|
|
|
|
|
||
r, P |
|
|
|
|
|||||
dt |
|
dt |
|
|
|
|
!" |
|
|
!" |
|
|
" |
!" |
|
" |
|
"!" "!" |
|
dL |
= |
dr |
dP |
||||||
dt |
|
|
P |
+ r, |
dt |
|
= [vP] + [rF] = |
||
|
dt |
|
|
|
|
|
|||
"! |
|
""! |
|
|
|
|
|
|
|
dL |
= |
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
||
dt |
|
|
|
|
|
|
|
|
|
"! |
|
"! |
|
|
|
|
|
|
|
dP |
|
|
|
|
|
|
|
|
|
= F |
|
|
|
|
|
|
|
||
sinα = 0 |
|
" !" |
!"! |
v P sinα + [rF]
dt
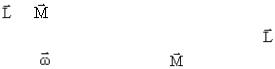
Момент инерции - это скалярная физическая величина, которая характеризует меру инертности твердого тела при вращении, подобно тому, как масса является мерой инертности тила при поступательном движении.
n |
I = ∫ R2 dm = ∫ R2 ρ dV |
|
I = ∑mi Ri2 |
m |
V |
i=1 |
dm = ρdV |
|
Пусть некоторое тело вращается вокруг оси z.
Получим уравнение динамики для некоторой точки mi этого тела, находящегося на расстоянии Ri от оси вращения. При этом
помним, что A и A |
направлены всегда вдоль оси вращения z, |
||
поэтому |
|
|
|
A |
или |
A |
. |
|
Поскольку A |
у всех точек разная, введем вектор угловой скорости A , причем |
|
A |
. Тогда A |
. |
|
Так как тело абсолютно твердое, то в процессе вращения mi и Ri останутся неизменными. Тогда
A
Обозначим Ii – момент инерции точки находящейся на расстоянии R от оси вращения:
A.(6.2.1)
Момент инерции тела служит мерой инертности во вращательном движении.
В общем случае тело состоит из огромного количества точек, и все они находятся на разных расстояниях от оси вращения. Момент инерции такого тела равен:
A.(6.2.2)
Как видно, момент инерции I – величина скалярная.
Просуммировав (6.2.1) по всем i-м точкам, получим A |
илиA |
.(6.2.3) |
Это основное уравнение динамики тела, вращающегося вокруг неподвижной оси.
(Сравним: A – основное уравнение динамики поступательного движения тела).
Для момента импульса A тела, вращающегося вокруг оси z, имеем:
A |
, A |
, A |
. (6.2.4) |
(Сравним: A – для поступательного движения).
При этом помним, что A и A - динамические характеристики вращательного
движения, направленные всегда вдоль оси вращения. Причем A определяется
направлением вращения, как и A , а направление A зависит от того, ускоряется или замедляется вращение.
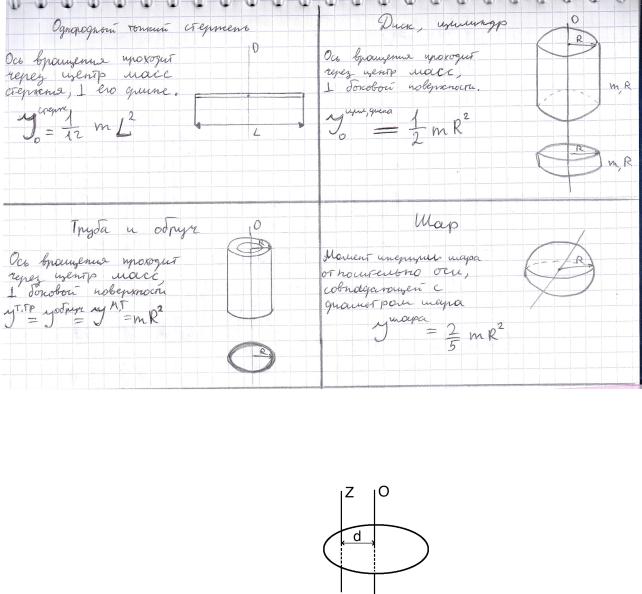
17)Пример вычисления момента инерции твердого тела. Теорема Штейнера.
Th Штейнера.
Момент инерции твердого тела относительно нормальной оси Z равен моменту инерции твердого тела относительно параллельной ей оси и проходящей через центр масс плюс произведение массы твердого тела на квадрат расстояния между осями.
IZ = IO + md2

18)Закон сохранения момента импульса для механической системы.
Момент импульса твердого тела - сумма моментов импульса М.Т.
!!!!" n !!!!" !"
Lтв.т. = ∑ LМi .Т . = I w
i=1
Взамкнутой системе момент импульса сохраняется, т.е. не меняется со временем.
Система называется замкнутой, если на неё не действуют внешние силы или они скомпенсированные.
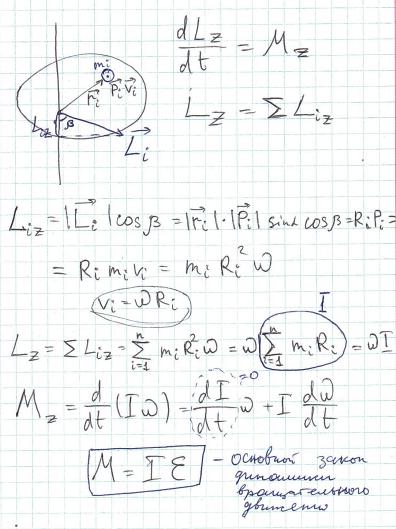
19)Основной закон динамики вращательного движения твердого тела.
Если на тело тействует момент сил М, то оно вращается с постоянным угловым ускорением эпсилон.

20)Кинетическая энергия вращающихся тел.
т т |
n |
м т |
n m v2 |
n m ω2 R2 |
ω2 n |
|
ω2 I т т |
|||||
. . |
|
. . |
= ∑ |
i i |
=∑ |
i |
i i |
= |
2 |
= |
|
. . |
Eкин. |
= ∑ Eкин. |
2 |
|
2 |
∑ mi Ri |
2 |
= Eкин. |
|||||
|
i=1 |
|
i=1 |
i=1 |
|
2 |
i=1 |
|
|
|||
Если кроме вращательного движения имеется еще и поступательное, то к вращательной кинетической энергии прибавляется поступательное(классическое).
21)Колебания. Гармонические колебания и их характеристики.
Механические колебания - это процессы, в той или иной степени повторяющиеся по времени.
Различают механические, эл/магнитные и эл/механические колебания.
Классификация колебаний:
1)Свободными называются колебания, которые происходят в отсутствии внешних воздействий и возникают при отклонении системы от состояния равновесия. 2)Вынужденными называются колебания, возникающие в системе под действием высшей переменной силы.
3)Автоколебания(вынужденные+влияние системы на воздействие). 4)Параметрические колебания(изменяется какой-либо параметр системы от времени, например, длина нити математического маятника).
Колебания называются периодическими, если изменения физической величины повторяются через равные промежутки времени.
Наименьший промежуток времени - период колебания Т.
Гармонические колебания являются самым простым видом колебаний. Гармонические колебания - колебания, которые изменяются со временем по закону sin
или cos.
x = x0 sin(ωt + ϕ0 ) |
ω = 2π = 2πν( |
рад) |
x = x0 cos(ωt + ϕ0 ) |
T |
сек |
t = 0 → x = x0 sinϕ0
X0 - амплитуда колебаний (величина наибольшего отклонения системы от положения равновесия);
A- круговая (циклическая) частота.
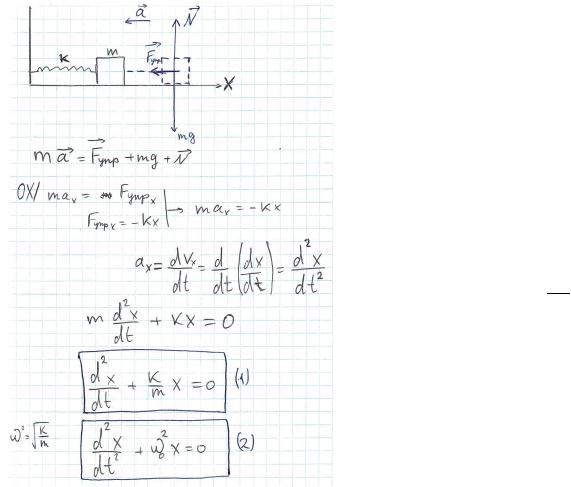
22)Собственные колебания системы на примере груза, прикрепленного к пружине.
Пусть у нас есть горизонтальная гладкая поверхность, на которой находится тело массой m, которое через пружину связано с неподвижной вертикальной стрелкой. После вывода тела из состояния равновесия идут колебания.
Уравнения (1) и (2) называются
однородными дифференциальными уравнениями второго порядка. Его решениями являются гармонические колебания:
x = x0 sin(ω0t + ϕ0 )
Колебательная система совершает
свободные, незатухающие гармонические
колебания.
Имеет место закон сохранения механической энергии.
Eмех |
= Eкин + Eпот |
= mv2 |
+ kx |
2 |
= const |
|
|
2 |
2 |
|
|