

Основное уравнение динамики
Если F - сила, вызвающая ускорение тела, m – масса тела, a – приобротенное телом ускорение, то основное уравнение динамики
F = m * a
Прямая и обратная задача динамики
Исторически деление на прямую и обратную задачу динамики сложилось следующим образом.
Прямая задача динамики: по заданному характеру движения определить равнодействующую сил, действующих на тело. Обратная задача динамики: по заданным силам определить характер движения тела.
Начальные условия
Начальные условые – то, что дано или известно, когда время равно нулю. Т.е состояние тела в начале его процессов или движения

2.9 примеры сил
Центральная сила

Сила F, действующая на точку P, называется це тра ь ой с центром в точке O, если во всѐ время движения она действует вдоль линии, соединяющей точки O и P.
Примеры центральных сил

Центральная сила ньютоновского притяжения (величина силы F(r) пропорциональна 1/r2)
Сила Кулона (величина силы F(r) пропорциональна 1/r2) Сила Гука (величина силы F(r) пропорциональна r)ЗАКОН ВСЕМИРНОГО ТЯГОТЕНИЯ.
Все тела взаимодействуют друг с другом с силой, прямо пропорциональной произведению масс этих тел и обратно пропорциональной квадрату расстояния между ними.

- из закона Всемирного тяготения. (где M - масса планеты, m - масса тела, R - расстояние до центра планеты).
G=6,67.10-11
СИЛА ТЯЖЕСТИ
![]() -
сила тяжести из второго закона Ньютона
(где m - масса тела, g - ускорение силы
тяжести).
-
сила тяжести из второго закона Ньютона
(где m - масса тела, g - ускорение силы
тяжести).
Если
обозначить R0
радиус планеты, а h - расстояние до тела
от поверхности планеты, то:
![]()
Сила реакции опоры - сила упругости, действующая на тело со стороны опоры, перпендикулярно ее поверхности.

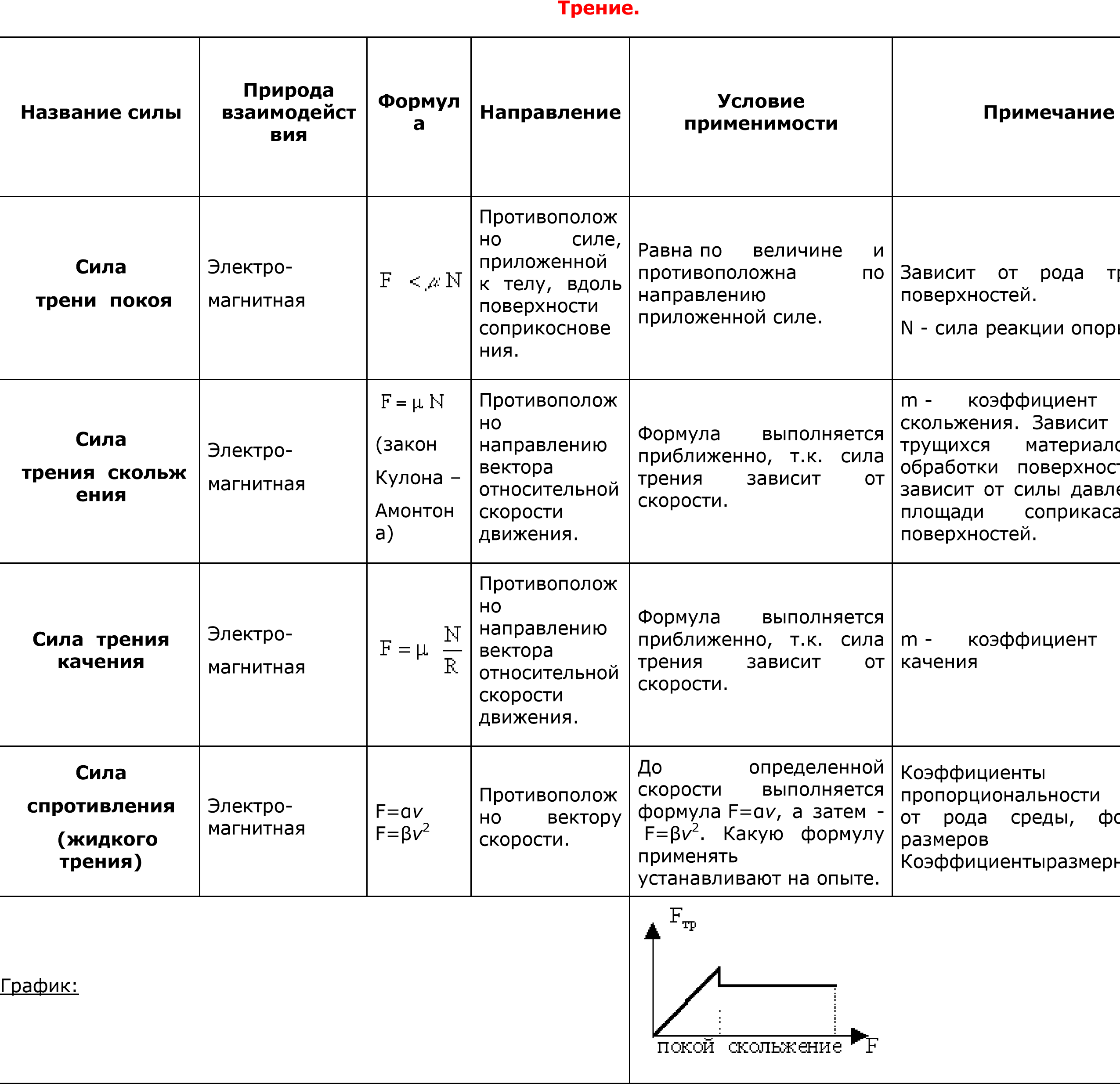
За о А о то а — Ку о а — закон,устанавливающий связь между поверхностной силой трения,возникающей при относительном скольжении тела,с силой нормальной реакции,действующей на тело со стороны поверхности.
![]()
где
![]() —
коэффициент
трения
для данных поверхностей (зависит от
материала),
—
коэффициент
трения
для данных поверхностей (зависит от
материала),![]() — сила нормальной реакции опоры (зависит
от площади пятна контакта и давления).
— сила нормальной реакции опоры (зависит
от площади пятна контакта и давления).
|
Отношение абсолютной деформации D? к первоначальной длине образца?o
называют относительной
деформацией:
|
|
|
Если
деформация упругая, а относительная
деформацияИз опыта:
-
закон
Гука.
Сила
упругости прямо пропорциональна
абсолютной
деформации.
С
учетом направления:
k - коэффициент жесткости (упругости). Зависит от материала, формы и размеров тела (Например, чем длиннее и тоньше пружина, тем ее жесткость меньше.) Единицы
коэффициента упругости в СИ:
|
|

 С
о рость све та
в вакууме — абсолютная величина
скорости
распространения
электромагнитных
волн
в
вакууме.По
современным представлениям, скорость
света в вакууме — предельная скорость
движения
частиц
и распространения взаимодействий.
С
о рость све та
в вакууме — абсолютная величина
скорости
распространения
электромагнитных
волн
в
вакууме.По
современным представлениям, скорость
света в вакууме — предельная скорость
движения
частиц
и распространения взаимодействий.
Огра е ость преде ы действ ьюто овс ой е а
С увеличением скорости и умеьшением массы тела наблюдается все более значительные отклонения от ньютоновской механики. Дальнейшее развитие науки привело к созданию релятивистской механики(для больших скоростей) и квантовой механики (для малых масс). Ньютоновская механика – это механица для тел больших масс( по сравнению с атомами) с малыми скоростями ( по сравнению со скоростью света).
Закон сохранения механической энергии.
E = Ep + Ek = const. В замкнутой системе, в которой действуют только консервативные силы, механическая энергия сохраняется.
Работа силы трения и механическая энергия.
E1 - E2 = Aтр
Удар, при котором сохраняется механическая энергия системы, наз. абсолютно упругим ударом.
![]()
Удар, при котором тела движутся после столкновения вместе, с одинаковой скоростью, наз. абсолютно неупругим ударом (при этом механическая энергия не сохраняется).

Для замкнутой системы тел момент внешних сил всегда равен нулю, так как внешние силы вообще не действуют на замкнутую систему.
Поэтому
![]() ,
то есть
,
то есть
![]() или
или ![]()
Закон сохранения момента импульса: момент импульса замкнутой системы тел относительно любой неподвижной точки не изменяется с течением времени.

2,11 понятие механической системы. внутренние и внешние силы:
Совокупность множества матеpиальных частиц обpазуют систему матеpиальных точек. Если система матеpиальных частиц такова, что движение каждой ее точки зависит от положения остальных точек, то она называется механической системой матеpиальных точек.
Условия, огpаничивающие свободу движения точек системы, называют связями (гибкие, идеально гладкие, шаpниpные).
Все силы, действующие на систему несвободных точек, можно разделить на активные (вызывающие движение системы) и пассивные (pеакции связей). Кpоме того, силы делятся на внешние и внутpенние.
В
н е ш н и м и называют силы, действующие
на движущуюся механическую систему
извне и ей не пpинадлежат (![]() ).
).
В
н у т p е н н и м и силами называют силы
взаимодействия между отдельными точками
системы (![]() ).Внутpенние
силы обладают следующими свойствами.
).Внутpенние
силы обладают следующими свойствами.