

Описание алгоритма декомпозиции
Дадим
формальное описание алгоритма декомпозиции
Данцига-Вульфа для решения задачи
(10.1.29)—(10.1.32) (20). Пусть уже имеется
начальное допустимое базисное решение
задачи (10.1.18)—(10.1.21), которому соответствует
вектор разрешающих множителей ![]() .
Каждая итерация алгоритма состоит из
двух этапов.
.
Каждая итерация алгоритма состоит из
двух этапов.
Первый
этап. 1. Используя вектор оценок ![]() предыдущей
итерации, сформируем и решим подзадачи
(10.1.36)—(10.1.37) и найдем оптимальное значение
целевой функции, а также соответствующие
решения
предыдущей
итерации, сформируем и решим подзадачи
(10.1.36)—(10.1.37) и найдем оптимальное значение
целевой функции, а также соответствующие
решения ![]()
![]()
2. Вычислим минимальную оценку
 (10.1.38)
(10.1.38)
3.
Если ![]() то
вычисление заканчивается и определяем
оптимальное решение задачи
(10.1.29)—(10.1.32)
то
вычисление заканчивается и определяем
оптимальное решение задачи
(10.1.29)—(10.1.32)
![]() (10.1.39)
(10.1.39)
где ![]() —
предыдущее базисное решение координирующей
задачи, а
—
предыдущее базисное решение координирующей
задачи, а ![]() — крайняя
точка
— крайняя
точка ![]() ,
соответствующая базисной переменной
,
соответствующая базисной переменной ![]()
Если ![]() то
переходим ко второму этапу.
то
переходим ко второму этапу.
Второй
этап. Формируем столбец ![]() который
необходимо ввести в базис задачи
(10.1.18)—(10.1.21):
который
необходимо ввести в базис задачи
(10.1.18)—(10.1.21):
![]() (10.1.40)
(10.1.40)
Вводим
вектор ![]() в
базис, выполняем первый шаг симплекс-метода,
после чего находим новое допустимое
базисное решение
в
базис, выполняем первый шаг симплекс-метода,
после чего находим новое допустимое
базисное решение
![]()
а также новый вектор оценок
![]()
На этом итерация заканчивается и переходим к первому этапу очередной итерации.
Как видно из описания, алгоритм декомпозиции Данцига-Вульфа представляет собой двухуровневый алгоритм, где на первом уровне решаются подзадачи (10.1.36), (10.1.37), а на втором уровне — координирующая задача (10.1.18)—(10.1.21). Если координирующая задача является невырожденной, то на каждой итерации значение целевой функции возрастает, и поскольку число базисов ее конечно и ни один из них не используется дважды, оптимальное решение находится за конечное число шагов.
Ограниченная координирующая задача
Как следует из приведенного выше описания алгоритма декомпозиции, оптимизационная задача в нем решается лишь на первом уровне, тогда как на втором фактически выполняется лишь одна итерация симплекс-метода. Однако возможна модификация этого метода, заключающаяся в решении оптимизационных задач на двух уровнях. В этом случае решается так называемая ограниченная координирующая задача, которая получается из координирующей задачи (10.1.18)—(10.1.21) в результате отбрасывания всех столбцов, за исключением базисных и претендующих на включение в базис на текущей итерации.
Такую ограниченную координирующую задачу можно представить в виде:
максимизировать
![]() (10.1.41)
(10.1.41)
при ограничениях
![]()
![]() (10.1.42)
(10.1.42)
где ![]() —
переменные текущего базиса:
—
переменные текущего базиса: ![]() —
переменная, вводимая в базис (для нее
—
переменная, вводимая в базис (для нее ![]() ).
Если текущий базис является невырожденным,
то из него будет выведена переменная,
для которой
).
Если текущий базис является невырожденным,
то из него будет выведена переменная,
для которой ![]() и
полученное решение будет оптимальным.
и
полученное решение будет оптимальным.
Заметим, что возможны случаи, когда использование ограниченной координирующей задачи по сравнению с обычной координирующей задачей дает эффект.
Варианты декомпозиции прямой задачи
Существует много разных способов декомпозиции прямой задачи, каждый из которых приводит к своей форме координирующей и ограниченной координирующей задач.
Рассмотрим,
например, вариант декомпозиции для
матрицы блочно-диагонального вида.
Обозначим решение системы ![]()
![]() (10.1.43)
(10.1.43)
где ![]() крайние
точки многогранника
крайние
точки многогранника ![]() ;
;
![]()
![]()
Тогда координирующая задача будет иметь вид:
максимизировать
![]() (10.1.44)
(10.1.44)
при ограничениях
![]() (10.1.45)
(10.1.45)
![]() (10.1.46)
(10.1.46)
где
![]()
Координирующая
задача (10.1.44)—(10.1.46) отличается от
координирующей задачи (10.1.18)—(10.1.21).
Во-первых, она имеет не одно, а ![]() ограничений
типа (10.1.46), во-вторых, решение для каждой
подсистемы
ограничений
типа (10.1.46), во-вторых, решение для каждой
подсистемы ![]()
![]() самостоятельно
выражается через переменные
самостоятельно
выражается через переменные ![]() ,
тогда как в задаче (10.1.13)—(10.1.21) эти
решения рассматривались совместно.
Применим метод обратной матрицы с
использованием процедуры генерации
столбцов для решения задачи
(10.1.44)—(10.1.46).
,
тогда как в задаче (10.1.13)—(10.1.21) эти
решения рассматривались совместно.
Применим метод обратной матрицы с
использованием процедуры генерации
столбцов для решения задачи
(10.1.44)—(10.1.46).
Пусть ![]() —
базисная матрица размерности
—
базисная матрица размерности ![]() а
а ![]() —
вектор относительных оценок для этого
решения (
—
вектор относительных оценок для этого
решения (![]() -оценка
ограничений (10.1.45), а
-оценка
ограничений (10.1.45), а ![]() —
оценка для i-го
ограничения (10.1.46)).
—
оценка для i-го
ограничения (10.1.46)).
Вычисляем
теперь оценки ![]() для
векторов, соответствующих переменным
для
векторов, соответствующих переменным![]()
![]() (10.1.47)
(10.1.47)
Для
определения ![]() при
фиксированном
при
фиксированном ![]() решаем
подзадачу вида:
решаем
подзадачу вида:
минимизировать
![]() (10.1.48)
(10.1.48)
при ограничениях
![]()
![]() (10.1.49)
(10.1.49)
Если
![]()
то текущее решение – оптимально, в противном случае – в базис задачи (10.1.44)—(10.1.46) вводится переменная, для которой
![]() (10.1.50)
(10.1.50)
Если
этот минимум достигается при ![]() а
а ![]() решение
подзадачи с индексом
решение
подзадачи с индексом ![]() то
в базис координирующей задачи вводится
столбец
то
в базис координирующей задачи вводится
столбец
![]()
где ![]() -мерный
вектор, все компоненты которого равны
0, за исключением
-мерный
вектор, все компоненты которого равны
0, за исключением ![]() -й
компоненты, равной 1.
-й
компоненты, равной 1.
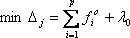
Пример 10.1. Для иллюстрации метода декомпозиции рассмотрим задачу ЛП:
максимизировать
![]() (1)
(1)
при ограничениях
![]() (2)
(2)
![]() (3)
(3)
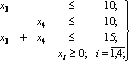 (4)
(4)
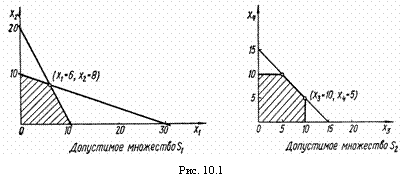
Эта задача имеет одно связывающее ограничение и два независимых блока. Области допустимых решений неравенств обоих подсистем представлены на рис. 10.1.
Разбиение
задачи (1)—(4) может быть осуществлено
разными способами, и каждому из них
будет соответствовать своя координирующая
задача с определенным типом ограничений
вида ![]() Воспользуемся
видом ограничений и построим ограниченную
координирующую задачу, которая будет
иметь два ограничения. Пусть
Воспользуемся
видом ограничений и построим ограниченную
координирующую задачу, которая будет
иметь два ограничения. Пусть ![]() и
и ![]() —
допустимые решения блоков (1) и (2)
соответственно. Тогда справедливо
соотношение
—
допустимые решения блоков (1) и (2)
соответственно. Тогда справедливо
соотношение
![]()
 и
и ![]()
где ![]() крайние
точки множеств
крайние
точки множеств ![]() и
и ![]() соответственно
определяемые ограничениями (3) и (4).
соответственно
определяемые ограничениями (3) и (4).
Целевая функция (1) в векторном виде запишется:
![]()
а связывающее ограничение
![]()
где ![]()
Запишем теперь координирующую задачу:
максимизировать
![]() (5)
(5)
при условиях
![]() (6)
(6)
![]() (7)
(7)
![]() (8)
(8)
![]() (9)
(9)
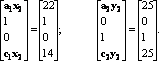
Выберем
в качестве начального допустимого
базисного решения ![]()
![]()
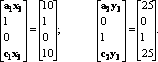
Будем решать эту задачу методом обратной матрицы. Начальная симплекс-таблица будет иметь вид Табл. 10.1.
В
последней строке таблицы находятся
переменные {![]() }:
}: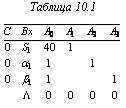
![]()
где ![]() соответствует
ограничению (7);
соответствует
ограничению (7); ![]() —
ограничению (8), а
—
ограничению (8), а ![]() соответствует
ограничению (8), а
соответствует
ограничению (8), а ![]() —
ограничению (9).
—
ограничению (9).
Первая итерация. Первый этап. Составим и решим подзадачи, отвечающие начальному ДБР:
1) минимизировать
![]()
при
ограничениях ![]()
2) минимизировать
![]()
при
ограничениях ![]()
Оптимальные решения этих задач легко находятся графически и равны:
![]()
Найдем минимальные оценки векторов-столбцов:
![]()
Тогда
оптимальные решения подзадач ![]() и
и ![]() образуют
новые столбцы координирующей задачи,
которые имеют вид:
образуют
новые столбцы координирующей задачи,
которые имеют вид:
Второй этап. Запишем ограниченную координирующую задачу, используя ее текущий базис и эти столбцы:
максимизировать
(14)![]()
при условиях

Для
решения этой задачи используем метод
обратной матрицы, как наиболее подходящий
для реализации процедуры генерации
новых столбцов, и введем их в исходное
ограничение. Используя ее, получим
последовательность основных таблиц
10.2–10.4 и вспомогательную таблицу 10.5,
где приводятся оценки ![]() для
векторов задачи. Решение, полученное в
табл. 10.4 (цикл 2) , оказывается оптимальным,
так как для него все оценки
для
векторов задачи. Решение, полученное в
табл. 10.4 (цикл 2) , оказывается оптимальным,
так как для него все оценки ![]() в
табл. 10.5 будут положительными. В табл.
10.2 вводится
в
табл. 10.5 будут положительными. В табл.
10.2 вводится ![]() а
выводится
а
выводится ![]()
Таблица 10.2 Таблица 10.3
|
|
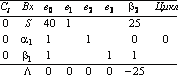
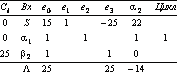
Таблица 10.4 Таблица 10.5

В результате получили новое оптимальное решение задачи
![]()
При
этом значение целевой функции равно ![]()
Вторая итерация. Первый этап. Из последней строки табл. 10.4 находим вектор оценок
![]()
Используем
это значение ![]() для
формирования целевых функций подзадач.
для
формирования целевых функций подзадач.
Подзадача
1. Минимизировать ![]()
при
условии ![]()
Подзадача2.Минимизировать ![]()
при
условии
![]()
Решив эти подзадачи, получим оптимальные решения
![]()
![]()
которым отвечают следующие минимальные оценки:

и столбцы
Так
как ![]() то
необходимо перейти ко второму этапу.
то
необходимо перейти ко второму этапу.
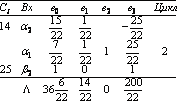
Второй этап. Составим новую ограниченную координирующую задачу, которая включает базисные столбцы оптимального решения предыдущей задачи и новые столбцы:
минимизировать ![]()
при ограничениях

Решаем
эту задачу методом обратной матрицы,
использовав в качестве начального
базиса оптимальный базис предыдущей
координирующей задачи (табл. 10.4).
Результаты решения приводятся в табл.
10.6—10.8. В табл. 10.6 выводится ![]() ,
вводится
,
вводится ![]() .
.
Табл. 10.8 является вспомогательной. В ней приведены только оценки векторов.
Таблица 10.6 Таблица 10.7
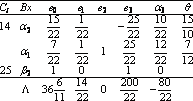
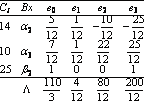
Таблица 10.8

Итак,
в результате решения координирующей
задачи получено новое решение: ![]() .
Ему соответствует следующее решение
исходной задачи:
.
Ему соответствует следующее решение
исходной задачи:
![]()
и
значение ц.ф.
![]() .
.
Третья
итерация. Первый этап. Вектор оценок ![]() имеет
вид (см.табл.10.7.):
имеет
вид (см.табл.10.7.):
![]()
Составим подзадачи.
Подзадача
1. Минимизировать ![]() при
следующих ограничениях:
при
следующих ограничениях: ![]() .
.
Подзадача
2. Минимизировать ![]() при
следующих ограничениях:
при
следующих ограничениях: ![]() .
.
Решив эти задачи находим оптимальные решения:
![]()
И значения минимальных оценок векторов:
Так
как они неотрицательны, то полученное
на второй итерации решение ![]() является
оптимальным.
является
оптимальным.