

Введение
Теоретическая механика изучает общие законы механического движения и равновесия материальных тел. Она является научной основой многих областей современной техники, ее законы и методы позволяют изучить и объяснить целый ряд важных явлений в окружающем нас мире.
Статикойназывается раздел теоретической механики, в котором изучаются методы преобразования систем сил в эквивалентные системы и устанавливаются условия равновесия материальных тел, находящихся под действием сил.
В статике все тела рассматриваются как абсолютно твердые. Абсолютно твердым теломназывают такое тело, расстояние между любыми двумя точками которого остается неизменным. В дальнейшем под названием «твердое тело» или просто «тело» подразумевается абсолютно твердое тело.
В статике твердого тела рассматриваются следующие две основные задачи:
задача о приведении системы сил – как данную систему сил заменить другой, в частности наиболее простой, ей эквивалентной?
задача о равновесии системы сил – каким условиям равновесия должна удовлетворять система сил, приложенных к твердому телу?
Основные понятия и аксиомы статики
1.1 Сила и система сил
Сила– векторная величина, являющаяся мерой механического действия одного материального тела на другое. Всякая сила характеризуется величиной, направлением и точкой приложения. Сила – приложенный вектор.
Линия действия силы– прямая, проходящая через точку приложения силы и вдоль которой расположена сила.
Системой силназывается совокупность сил, приложенных
к твердому телу. Обозначение:![]()
Две параллельные силы, равные по величине, направленные в противоположные стороны, называются парой сил, или просто парой (рис. 1).
Д ве
силы, равные по величине, направленные
в противоположные стороны и имеющие
общую линию действия, называютсяпрямо
противоположными
ве
силы, равные по величине, направленные
в противоположные стороны и имеющие
общую линию действия, называютсяпрямо
противоположными
С истема
сил, линии действия которых пересекаются
в одной точке, называетсясходящейся
системой сил (рис. 3).
истема
сил, линии действия которых пересекаются
в одной точке, называетсясходящейся
системой сил (рис. 3).
Точка
![]() пересечения сил этой системы называетсяточкой схода.
пересечения сил этой системы называетсяточкой схода.
Система сил, линии действия которых параллельны между собой, называется системой параллельных сил.
Кроме сходящихся и параллельных систем сил различают произвольные системы сил – это системы сил, линии действия которых расположены как угодно в пространстве (пространственная система сил) или на плоскости (плоская система сил).
Всякой силе ставится в соответствие свободный вектор – вектор силы. Вектором силыназывается свободный вектор, параллельный силе, направленный в ту же сторону и имеющий длину, равную длине силы.
Главным вектором системы силназывается свободный вектор, равный геометрической сумме векторов сил, составляющих систему.
Обозначение:
![]() ,
,![]() .
.
Если задана система
сил
![]() ,
то
,
то
![]() .
.
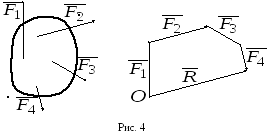 Строится
главный вектор как геометрическая сумма
векторов. Например, на тело действует
система сил
Строится
главный вектор как геометрическая сумма
векторов. Например, на тело действует
система сил![]() (рис. 4).
(рис. 4).
Из произвольной
точки
![]() строим вектор силы
строим вектор силы![]() ,
из его конца строим вектор силы
,
из его конца строим вектор силы![]() и так далее. Вектор
и так далее. Вектор![]() ,
который соединяет начало вектора силы
,
который соединяет начало вектора силы![]() с концом вектора силы
с концом вектора силы![]() – главный вектор. Ломанная линия,
получающаяся при нахождении главного
вектора называетсясиловым
многоугольником. Если начало и конец
силового многоугольника совпадают, то
силовой многоугольник называетсязамкнутым.Если силовой многоугольник
замкнут, то главный вектор равен нулю.
– главный вектор. Ломанная линия,
получающаяся при нахождении главного
вектора называетсясиловым
многоугольником. Если начало и конец
силового многоугольника совпадают, то
силовой многоугольник называетсязамкнутым.Если силовой многоугольник
замкнут, то главный вектор равен нулю.