

1. Расчет механизма подъема
1.1. Выбор кинематической схемы
Для выбора кинематической схемы механизма крана необходимо ознакомиться с конструкциями механизмов, которые применяются на разных типах судовых кранов [3]. Здесь следует четко уяснить: из каких сборочных единиц состоит механизм; назначение каждой единицы; их конструктивные особенности; как передается силовой поток от двигателя к рабочему органу.
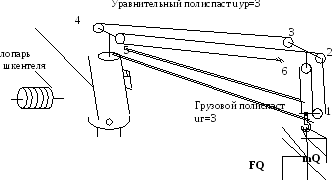
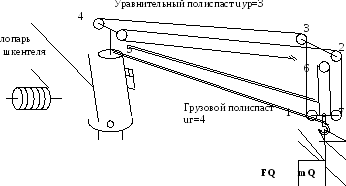
Первоначально определяется схема запаcовки тросов (рис. 1.1) и кратности полиспастов.
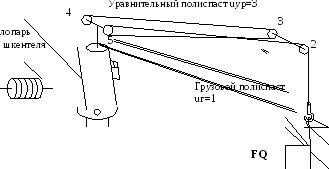
а)

б)
в)
г)
Рис. 1.1. Схемы запасовки грузового троса механизма подъема стреловых кранов
Грузовым
полиспастом
называется устройство, представляющее
собой систему блоков и тросов,
предназначенное для получения выигрыша
в силе. Полиспаст характеризуется
кратностью u.
Кратностью
полиспаста
называется отношение числа ветвей троса
nT,
сбегающих с подвижных блоков, к числу
ходовых концов (лопарей) nл,


 .
.
Кратностью грузового полиспаста называется отношение числа тросов, на которых висит груз к числу лопарей. В зависимости от числа лопарей полиспасты бывают одинарными и сдвоенными. В состав механизма подъема груза судовых стреловых кранов входит грузовой и уравнительный полиспаст. Уравнительный полиспаст, в отличие от грузового, не предназначен для уменьшения натяжения троса и служит только для горизонтального перемещения груза и для уравновешивания стрелы.

Рис.1.2. Кинематическая схема привода: 1 – аксиально-поршневой насос; 2 – радиально-поршневой мотор; 3 – тросовый барабан; 4 – ленточный тормоз.
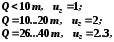
Кратность грузового полиспаста стреловых кранов назначается по грузоподъемности крана в соответствии с такими рекомендациями:
для приводов с радиально-поршневыми гидромоторами с вращающейся шайбой и аксиально-поршневыми гидромоторами
 (1.1)
(1.1)
для приводов с радиально-поршневыми гидромоторами с эксцентриковым валом
 (1.2)
(1.2)
где Q – грузоподъемность крана, т.
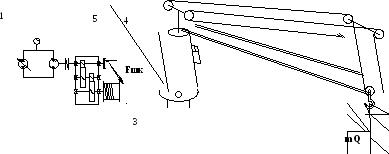
Рис.1.3. Кинематическая схема привода: 1 – аксиально-поршневой насос; 2 – радиально-поршневой мотор; 3 – тросовый барабан; 4 – дисковый тормоз; 5 – редуктор.
1.2. Определение высоты перемещения груза при полном изменении вылета стрелы
Длина стрелы определяется согласно общей схеме крана рис. 1.6 из A1BE, м
 , (1.3)
, (1.3)
где Lmax – максимальный вылет стрелы, м;
min – минимальный угол наклона стрелы, по правилу Регистра 4.2.1 для легких стрел (Q10 т) min=15, для тяжелых стрел (Q>10 т) min=25.
Высота расположения нока стрелы при максимальном вылете (рис. 1.4 из A1BE), м
 , (1.4)
, (1.4)
при минимальном вылете
 , (1.5)
, (1.5)
где max – максимальный угол наклона стрелы, град, который определяется из DBA2 (рис.1.4).
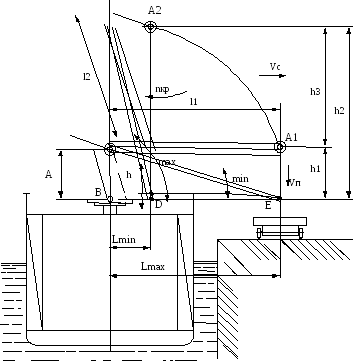
Рис. 1.4. Общая схема судового крана
Перемещение нока по высоте, м
 . (1.6)
. (1.6)
Требуемая высота портала, м
 , (1.7)
, (1.7)
где uу – кратность уравнительного полиспаста, которая принимается uу=15 (рис.1.1-1.3).
Расстояние между блоками портала и нока на максимальном вылете, м
 , (1.8)
, (1.8)
на минимальном вылете, м
 . (1.9)
. (1.9)
Отклонение груза от горизонтали при изменении вылета стрелы (с неработающем механизмом подъема), м
 , (1.10),
, (1.10),
где
 – допускаемое отклонение груза от
горизонтали при изменении вылета отLmax
до Lmin,
согласно Регистру
– допускаемое отклонение груза от
горизонтали при изменении вылета отLmax
до Lmin,
согласно Регистру
 .
.
Если условие (1.10)
не возможно выполнить, то следует
поступить следующим образам: увеличить,
например на 0,5м высоту портала А
и далее пересчитать с учетом формул
(1.8.), (1.9) и (1.10) величину
 и проверить условие
и проверить условие .
Если величина
.
Если величина стала больше предыдущей, то высоту
порталаА,
следует уменьшить на 0,5 м и вновь повторить
расчет, используя метод последовательных
приближений до выполнения неравенства
стала больше предыдущей, то высоту
порталаА,
следует уменьшить на 0,5 м и вновь повторить
расчет, используя метод последовательных
приближений до выполнения неравенства
