

Міністерство освіти і науки, молоді та спорту України
Національний університет харчових технологій
Кафедра ІАСУ
Курсовий проект
з дисципліни:
«Теорія автоматичного керування:
«Розроблення та дослідження системи автоматичного регулювання»
Варіант №15
Виконав студент
групи АКС-3-1
Ромащук О.М.
Керівник
Власенко Л.О.
Київ 2014
Зміст
1. Вступ
2. Дослідження об’єкта регулювання
2.1 Вимоги до завдання
2.2. Аналіз властивостей об’єкта
2.2.1 Визначення еквівалентних передаточних функцій
2.2.2 Визначення статичних характеристик
2.2.3 Побудова динамічних характеристик
- за каналом управління U1
- за каналом збурення Z1
- за каналом управління U3
- за каналом збурення Z3
3. Розробка та дослідження САР
3.1. Вибір закону регулювання
3.2 Аналіз стійкості системи
- за алгебраїчним критерієм Рауса-Гурвіця
3.3 Параметрична оптимізація системи
3.3.1 Графоаналітичний розрахунок оптимальних параметрів настройок регулятора
4. Висновок
Вступ
Автоматизація виробництва завжди була однією з основних складових прискорення науково-технічного прогресу як в агропромисловому комплексі, так і в інших сферах народного господарства.
В сучасних умовах системи автоматичного керування стали невід‘ємною частиною практично всіх сфер матеріального виробництва. Найбільш широко вони використовуються в промисловості, на транспорті, все помітнішими вони стають у сферах сільського господарства та побуту. Системи автоматичного керування застосовуються як для управління окремими машинами, так і для управління складними автоматичними комплексами, в яких ці машини та агрегати об‘єднуються у зв‘язану сукупність.
Термін автоматизація виробництва має різні тлумачення залежно від того, який аспект загальної проблеми розглядається в окремій ситуації – розробка, проектування, впровадження систем автоматизації, тощо. У загальному плані, автоматизація виробництва - це етап машинного виробництва, що характеризується звільненням людини від безпосереднього виконання функцій, управління виробничими процесами та їх передачі технічним засобам – автоматичним пристроям та системам. У більш загальному визначенні, автоматизація – це один з основних напрямів науково-технічного прогресу, пов‘язаний з впровадженням автоматичних та автоматизованих систем управління, які замінюють людину при керуванні різними об‘єктами. В основі поняття автоматизації лежить термін управління – цілеспрямована дія на процес (об‘єкт), яка забезпечує оптимальний чи заданий режим роботи.
Автоматизація виробництва дає найкращі результати лише при системному підході, коли досконало вивчаються властивості об‘єкта автоматизації, розробляється функціональна структура як сукупність виконуваних системою функцій.
Системи управління виділяються в особливий клас систем, які мають самостійні функції й задані цілі, а також високий рівень спеціальної системи організації, необхідної для реалізації цих функцій і завдань. Система управління завжди є взаємозв‘язаною сукупністю об‘єкта управління (керованої підсистеми) та регулятора в широкому значенні цього слова (управляючої підсистеми). Об‘єкт управління є відкритою підсистемою і взаємодіє із зовнішнім середовищем, яке, в свою чергу може порушувати режим функціонування об‘єкта за рахунок впливу збурень.
Розробка систем автоматичного керування повинна передбачати задоволення ряду необхідних умов, котрі ставляться перед ними, а саме умовам стійкості, якості та надійності. Крім того, розроблювані системи повинні мати вигідні економічні показники, що зумовлювало б вигідне їх використання в процесі виробництва. Саме виконання цих вимог є найголовнішим критерієм, що враховується при розробці АСР.
2. Дослідження об’єкта регулювання
2.1 Вимоги до завдання об’єкта регулювання та показників якості перехідного процесу АСР
Об’єкт вважається заданим, якщо відомо або може бути виведеним на основі вихідних даних його диференціальне рівняння або передаточна функція. Також має бути заданим вид, максимальне значення та місце прикладення збурювальних діянь. Якщо місце прикладення збурення не задане, вважається, що воно прикладене до точки прикладення керувального діяння.
Під час виконання даної роботи порядок диференціального рівняння об’єкта (число ємностей) не повинен бути вище третього. У випадку завдання одноємнісного об’єкта він повинен мати транспортне запізнювання.
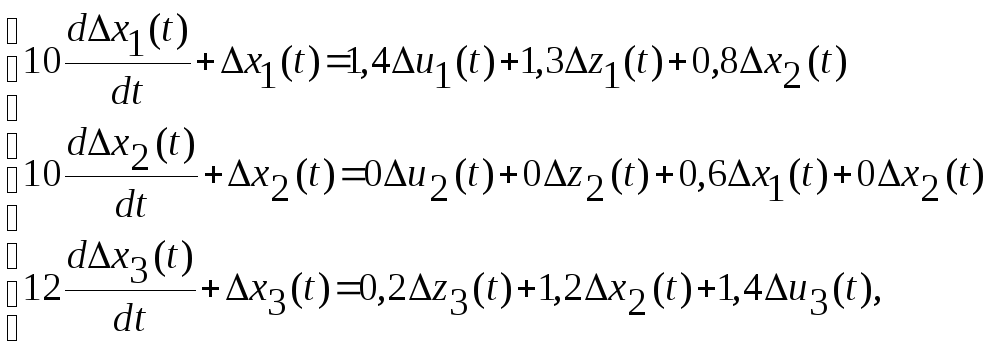
2.1.1. В даних методичних вказівках об’єкт задається у вигляді системи диференціальних рівнянь:
 (2.1)
(2.1)
де
індекси
![]() відповідно відносяться до першої, другої
та третьої ємностей;
відповідно відносяться до першої, другої
та третьої ємностей;
![]() – стала часу
– стала часу
![]() -тої
ємності;
-тої
ємності;
![]() –
відхилення вихідної величини
–
відхилення вихідної величини
![]() -тої
ємності від початкового (нульового або
заданого) значення;
-тої
ємності від початкового (нульового або
заданого) значення;
![]() –
коефіцієнт передачі
–
коефіцієнт передачі
![]() -тої
ємності за каналом управління;
-тої
ємності за каналом управління;
![]() –
коефіцієнт передачі
–
коефіцієнт передачі
![]() -тої
ємності за каналом збурення;
-тої
ємності за каналом збурення;
![]() –
коефіцієнт передачі відповідно від
наступної ємності до попередньої
(зворотний
зв’язок)
та від попередньої до наступної ємності
(прямий
канал),
–
коефіцієнт передачі відповідно від
наступної ємності до попередньої
(зворотний
зв’язок)
та від попередньої до наступної ємності
(прямий
канал),
![]() – час, с.
– час, с.
Числові значення згідно варіанту:
|
Т1 |
Т2 |
Т3 |
К1u |
K2u |
K3u |
K1z |
K2z |
K3z |
K1-2 |
K2-1 |
K2-3 |
K3-2 |
Z1 |
Z2 |
Z3 |
|
10 |
10 |
12 |
1,4 |
0 |
1,4 |
1,3 |
0 |
0,2 |
0,6 |
0,8 |
1,2 |
0 |
25 |
0 |
25 |
2.2.Аналіз властивостей об’єкта
Аналіз властивостей об’єкта регулювання полягає у визначенні його статичних та динамічних характеристик за каналами керувальних та збурювальних діянь.
2.2.1. Визначення еквівалентних передаточних функцій
Для проведення зазначеного вище аналізу потрібно вивести передаточні функції кожної ємності заданого об’єкту за каналами різних діянь, скласти структурну схему об’єкта та визначити його еквівалентні передаточні функції за каналами упраління та збурень. За потреби виконуються структурні перетворення (перенесення суматорів, точок, визначення внутрішніх еквівалентних зворотних зв’язків, перетворення тощо), в результаті чого структурна схема зводиться до еквівалентної однолінійної.
Потрібно визначити передаточні функції за каналами управлінь U1 і U3 та збурень Z1 та Z3 відповідно:
Wz1=
![]() Wz3=
Wz3=
![]()
Wu1=
![]() Wu3=
Wu3=
![]()
Запишемо систему рівнянь в операторному вигляді, враховуючи нульові початкові умови та підставивши числові значення коефіцієнтів та сталих часу. Система набуває вигляду:
(10p+1
)*![]() X1(p)=1.4*
X1(p)=1.4*![]() U1(p)+1.3*
Z1(p)+0,8*
U1(p)+1.3*
Z1(p)+0,8*![]() X2(p);
X2(p);
(10p+1
)*![]() X2(p)=0.6*
X2(p)=0.6*![]() X1(p);
X1(p);
(12p+1
)*![]() X3(p)=
0,2* Z3(p)+1.2*
X3(p)=
0,2* Z3(p)+1.2*![]() X2(p)+
1.4*
X2(p)+
1.4*![]() U3(p);
U3(p);
Визначимо передаточні функції для різних ємностей:

Складаємо структурну схему об’єкта
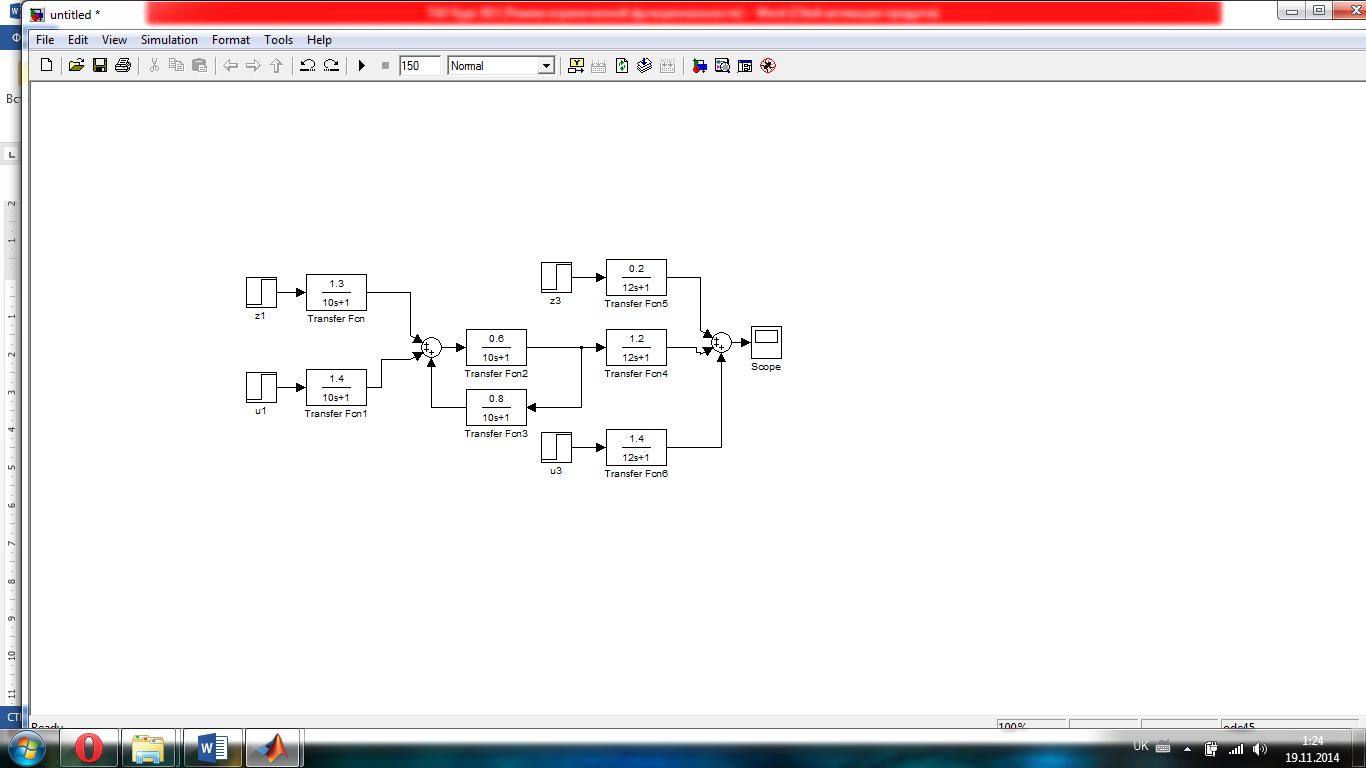
За виглядом структурної схеми визначаємо еквівалентні передаточні функції.
-за каналом зворотнього звязку ЗЗ:
![]()

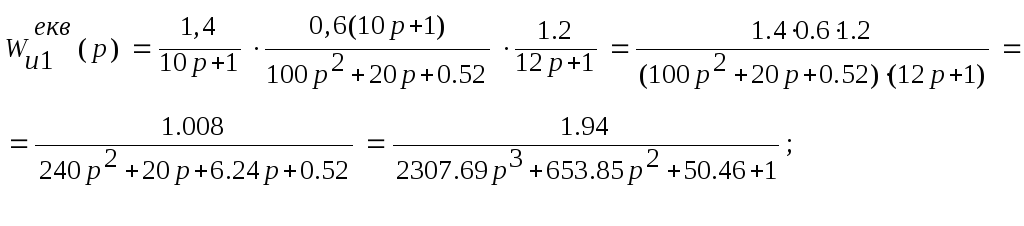
-за каналом управління U1:
![]()
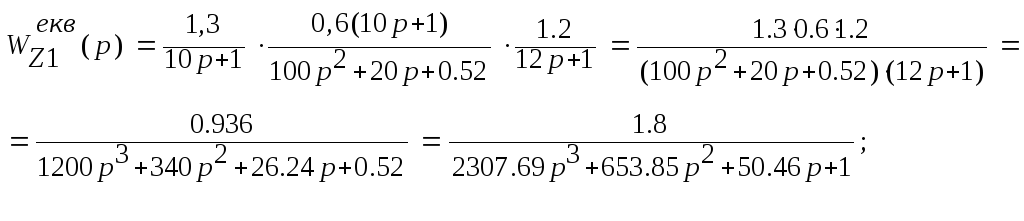
-за каналом збурення Z1:
![]()
-за каналом управління U3:
![]()
![]()
-за каналом збурення Z3:
![]()
![]()
2.2.2. Визначення статичних характеристик об’єкта
Статичні
характеристики об’єкта визначаються
за відповідними передаточними функціями
або за диференціальними рівняннями
об’єкта з урахуванням початкових умов
(початкові умови задаються керівником
курсової роботи або, якщо вони не задані
у вихідних даних, приймаються рівними
нулю). Оскільки в статичному режимі
об’єкта всі похідні вхідних діянь та
вихідної величини дорівнюють нулю,
зображення відповідних похідних у
передаточних функціях (![]() )
також прирівнюються до нуля.
)
також прирівнюються до нуля.
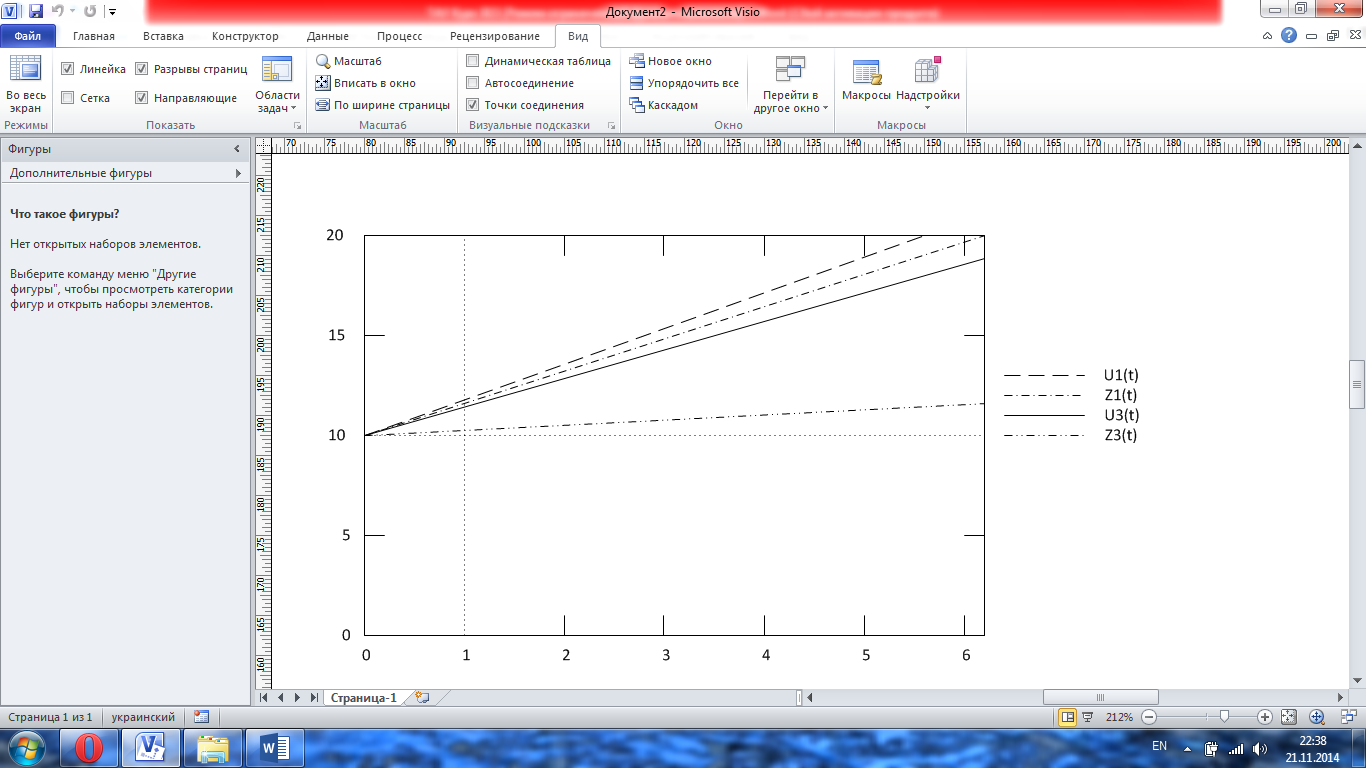
Керівником курсового проекту задана початкова умова Xзад=10
за
каналом управління
U1:
![]() U1(t)
U1(t)
за
каналом управління
U3:
![]() U3(t)
U3(t)
за
каналом збурення
Z1:
![]() Z1(t)
Z1(t)
за
каналом збурення Z3:
![]() Z3(t)
Z3(t)
При
цьому керувальні ![]() і
і ![]() та
збурювальні
та
збурювальні ![]() і
і ![]() та
діяння вимірюються у відсотках ходу
регулювального органу (% ХРО), їх повний
діапазон зміни становить 0…100 %, що
відповідає повному закриттю та повному
відкриттю РО. Графіки статичних
характеристик наведені на рис.
та
діяння вимірюються у відсотках ходу
регулювального органу (% ХРО), їх повний
діапазон зміни становить 0…100 %, що
відповідає повному закриттю та повному
відкриттю РО. Графіки статичних
характеристик наведені на рис.
2.2.3. Побудова динамічних характеристик
Для автоматичних систем регулювання основним режимом є динамічний , який характеризується змінюванням регулювальних координат x з часом t. Реальні АСР постійно перебувають під впливом збурень або змінюваного ∆Xзд.
У даному курсовому проекті оцінка об‘єкта (системи) в стані динаміки буде проводитись шляхом побудови кривих розгону за різними каналами та частотних характеристик (амплітудно-частотна, фазо-частотна та амплітудно-фазова характеристики).
Припустимо, що вхідні діяння змінюються за частотним характером. Тоді поведінка системи у стані динаміки буде оцінюватись за допомогою частотних характеристик.
Часові
характеристики
за відповідними каналами отримуються
подачею на вхід змодельованого об’єкта
стрибкоподібного вхідного сигналу (![]() ).
На часових характеристиках потрібно
визначити коефіцієнт передачі об’єкта
за відповідним каналом
).
На часових характеристиках потрібно
визначити коефіцієнт передачі об’єкта
за відповідним каналом
![]() ,
сталу часу
,
сталу часу![]() та час запізнення
та час запізнення![]() .
Отримані графіки є обов’язковою
частиною пояснювальної записки курсової
роботи.
.
Отримані графіки є обов’язковою
частиною пояснювальної записки курсової
роботи.

1) Постійна часу Tоб, яка визначається величиною відрізка, що відсікає на лінії усталеного режиму дотична, яка проведена до кривої h(t) на лінії перегину.
2) Тривалість перехідного процесу приблизно дорівнює 3*Тоб
3) τ запізнення – час запізнення, величина відрізка, що відсікає на абсцисі дотична, яка проведена до кривої h(t) на лінії перегину.
4) Коб – величина усталеного значення.
Загальні показники якості перехідного процесу:
1)
Динамічна похибка (максимальне відхилення
керованого параметру від заданого
значення)
![]()
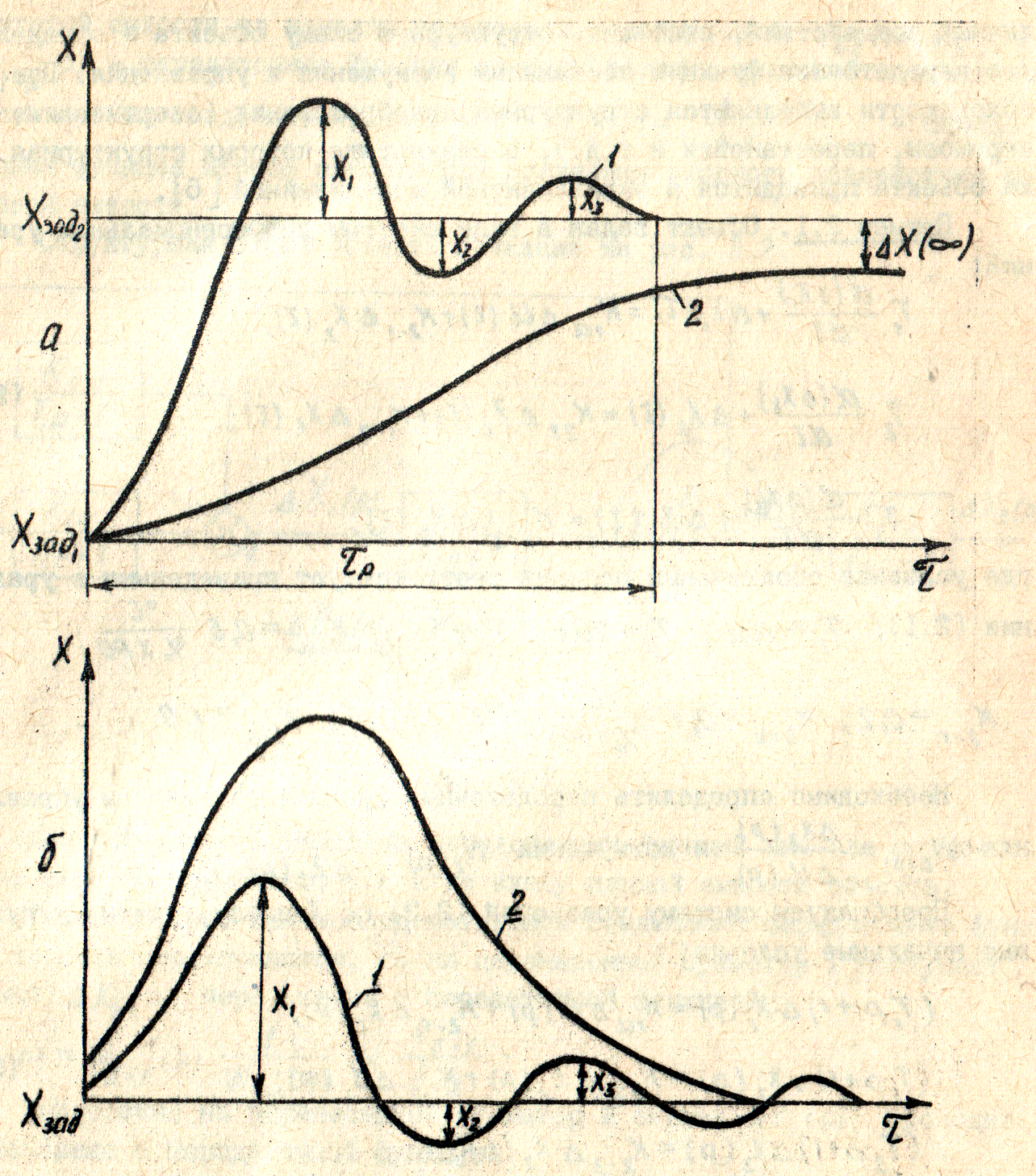
Рис. 2.1. Графіки перехідних процесів відносно
керувального (зміни завдання) (а) та збурювального (б) діянь:
1 – коливальний; 2 – аперіодичний .
2) Статична похибка (усталене відхилення)
![]() ;
;
3) Час
регулювання
![]() ;
;
4)
Перерегулювання
![]() ;
;
5) Ступінь
затухання перехідного
процесу
![]() .
.
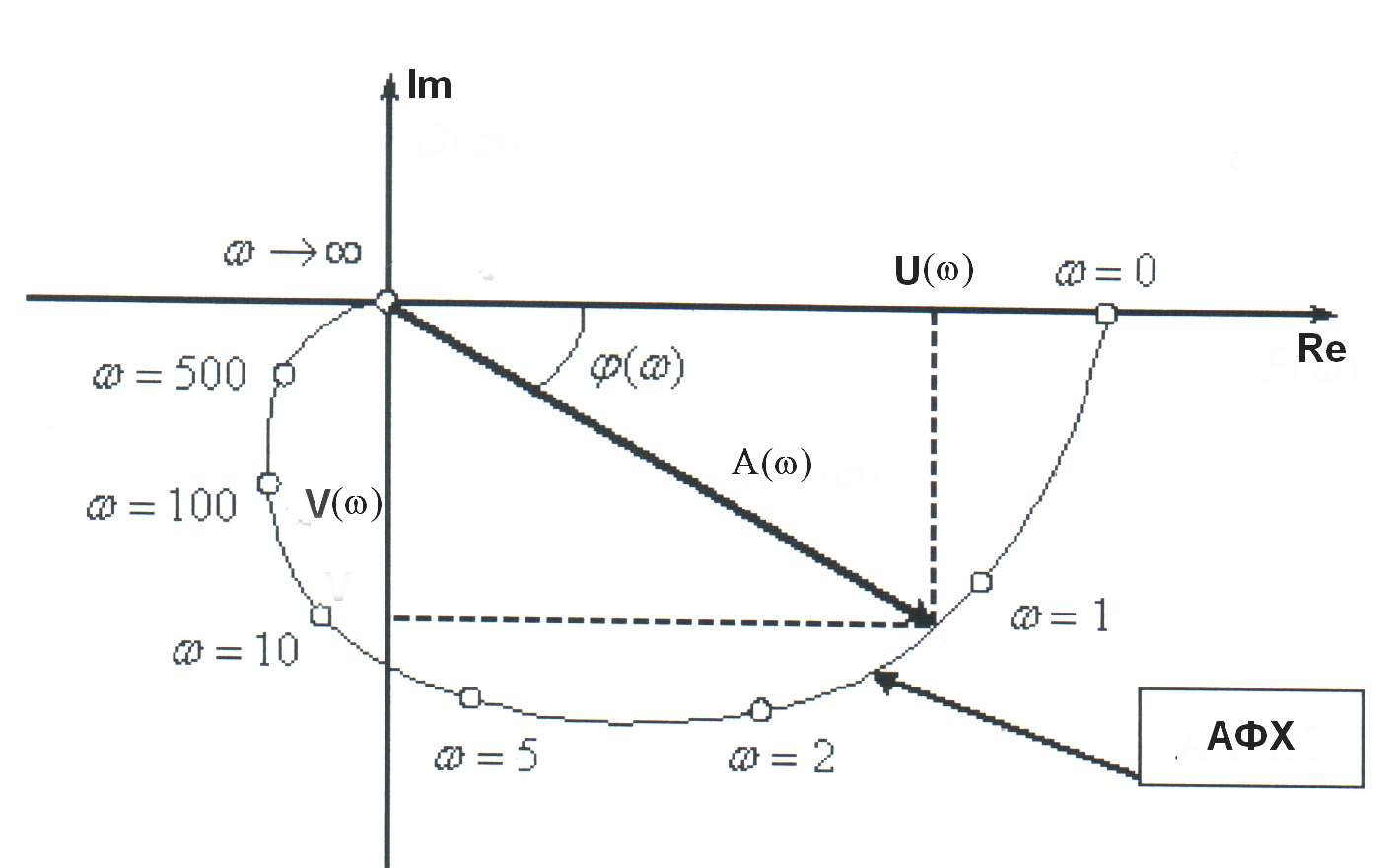
Частотні
характеристики (амплітудно-фазова
АФХ, амплітудно-частотна АЧХ та
фазо-частотна ФЧХ)
визначаються
з передаточних функцій, визначених
раніше формальною заміною
![]() ,
де
,
де![]() ,
а
,
а![]() частота,
що змінюється від 0 до
частота,
що змінюється від 0 до![]() .
Після підстановки отримуємо АФХ
.
Після підстановки отримуємо АФХ![]() ,
яку можна представити в алгебраїчному
або показниковому вигляді.
,
яку можна представити в алгебраїчному
або показниковому вигляді.
Для
представлення АФХ в алгебраїчному
вигляді
![]() чисельник та знаменник домножуємо та
ділимо на комплексне число, спряжене
із знаменником, і в отриманому виразі
виділяємо дійсну
чисельник та знаменник домножуємо та
ділимо на комплексне число, спряжене
із знаменником, і в отриманому виразі
виділяємо дійсну![]() та уявну
та уявну![]() частини:
частини:
![]()
Також АФХ можна представити у показниковому вигляді:
![]() ,
,
де
![]() – відповідно модуль (амплітуда) та
аргумент (фаза) АФХ.
– відповідно модуль (амплітуда) та
аргумент (фаза) АФХ.
Для
побудови графіків
![]() ,
,![]() та
та![]() використовується інтервал дійсних
додатних частот
використовується інтервал дійсних
додатних частот![]() .
Також потрібно визначити характерні
точки перетину з осями координат АФХ,
які отримуються з рівнянь (2.14), і дають
змогу визначити проміжні значення
частот:
.
Також потрібно визначити характерні
точки перетину з осями координат АФХ,
які отримуються з рівнянь (2.14), і дають
змогу визначити проміжні значення
частот:
 (2.14)
(2.14)
Щоб
побудувати графіки
![]() та
та![]() потрібно скласти таблицю і згідно неї
будуються графіки. На рис. показаний
приклад оформлення названих графіків.
потрібно скласти таблицю і згідно неї
будуються графіки. На рис. показаний
приклад оформлення названих графіків.

- за каналом управління U1:
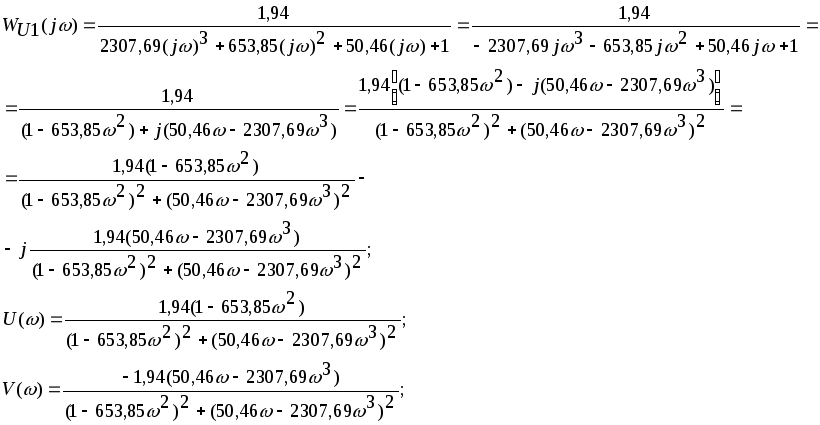
Визначимо вирази АЧХ та ФЧХ:

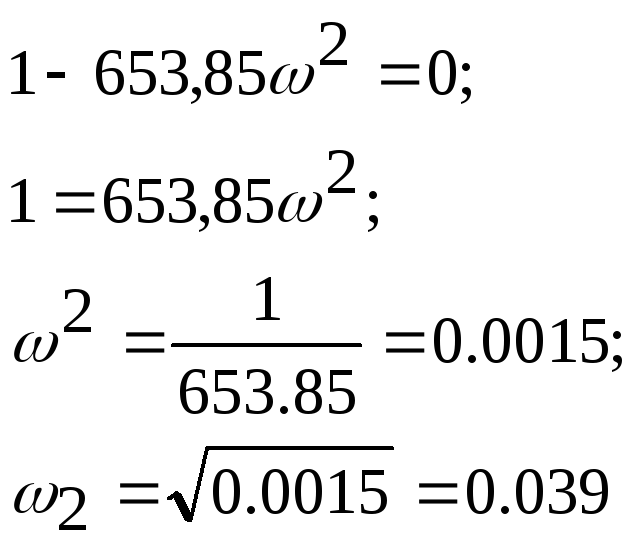
Умовою перетину годографом АФХ дійсної осі (U) є виконання рівності, яка випливає з рівняння (2.19):
![]()
Дана
умова виконується при додатних частотах
![]() та
та
![]()

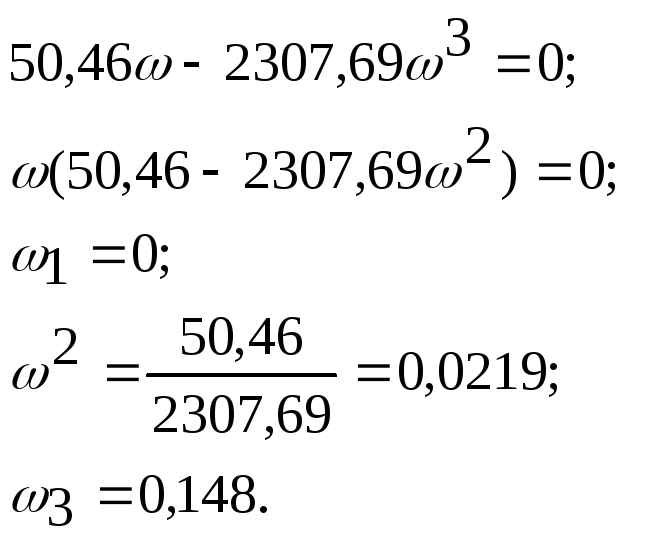
Уявна вісь (V) перетинається годографом АФХ за додатної частоти, яка визначається з рівності:
 .
.
![]() .
.
![]()
Згідно
отриманих інтервалів частот задаємося
проміжними частотами для обчислення
![]() та
та![]() .
Результати обчислень заносимо у таблицю.
.
Результати обчислень заносимо у таблицю.
Таблиця визначення частотних характеристик об’єкта
|
|
|
|
|
|
|
0 |
1,66 |
0 |
1,66 |
0 |
|
0,01 |
1,61 |
-21 |
1,5 |
-0,58 |
|
0,02 |
1,47 |
-41 |
1,11 |
-0,96 |
|
0,03 |
1,3 |
-58,6 |
0,67 |
-1,11 |
|
0,04 |
1,12 |
-74 |
0,5 |
-1,08 |
|
0,0517 |
0,93 |
-89,9 |
0,001 |
-0,93 |
|
0,08 |
0,59 |
-120 |
-0,29 |
-0,51 |
|
0,12 |
0,32 |
-150 |
-0,28 |
-0,17 |
|
0,187 |
0,138 |
-179,9 |
-0,138 |
-0,00007 |
|
0,3 |
0,05 |
-208 |
-0,04 |
0,02 |
|
1 |
0,0015 |
-250 |
-0,00051 |
0,0000015 |
|
10 |
0,0000015 |
-267 |
-0,0000054 |
0,0000015 |
- за каналом збурення Z1:
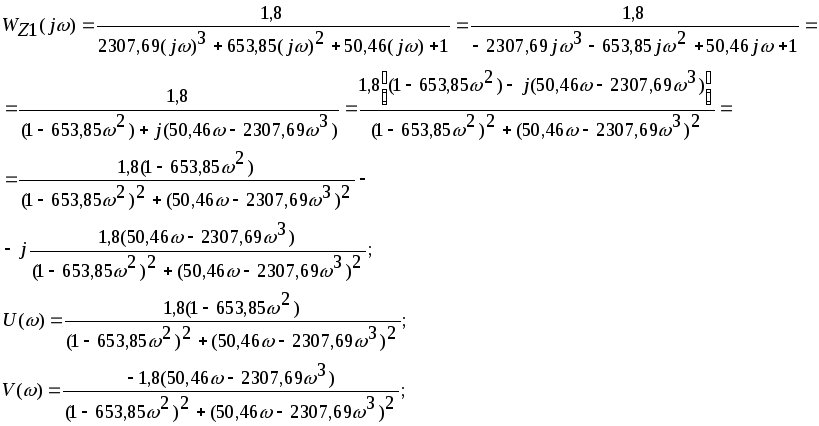
Визначимо вирази АЧХ та ФЧХ:
Умовою перетину годографом АФХ дійсної осі (U) є виконання рівності, яка випливає з рівняння (2.19):
![]()
Дана
умова виконується при додатних частотах
![]() та
та
![]()

Уявна вісь (V) перетинається годографом АФХ за додатної частоти, яка визначається з рівності:
 .
.
![]() .
.
![]()
Згідно
отриманих інтервалів частот задаємося
проміжними частотами для обчислення
![]() та
та![]() .
Результати обчислень заносимо у таблицю.
.
Результати обчислень заносимо у таблицю.
Таблиця визначення частотних характеристик об’єкта
|
|
|
|
|
|
|
0 |
1,33 |
0 |
1,33 |
0 |
|
0,01 |
1,29 |
-21 |
1,2 |
-0,46 |
|
0,02 |
1,18 |
-41 |
0,89 |
-0,78 |
|
0,03 |
1,04 |
-58,6 |
0,54 |
-0,89 |
|
0,04 |
0,9 |
-74 |
0,24 |
-0,86 |
|
0,0517 |
0,75 |
-89,9 |
0,0008 |
-0,75 |
|
0,08 |
0,47 |
-120 |
-0,23 |
-0,41 |
|
0,12 |
0,26 |
-150 |
-0,22 |
-0,13 |
|
0,187 |
0,11 |
-179,9 |
-0,11 |
-0,00005 |
|
0,3 |
0,036 |
-208 |
-0,031 |
0,017 |
|
1 |
0,0012 |
-250 |
-0,0004 |
0,00011 |
|
10 |
0,0000012 |
-267 |
-0,0000004 |
0,0000012 |
- за каналом управління U3:
Визначаємо вирази АЧХ та ФЧХ:
Умовою перетину годографом АФХ дійсної осі (U) є виконання рівності, яка випливає з рівняння (2.19):
![]()
Дана
умова виконується при додатних частотах
![]() .
.
Уявна вісь годографа не перетинається.
Згідно
отриманих інтервалів частот задаємося
проміжними частотами для обчислення
![]() та
та![]() .
Результати обчислень заносимо у таблицю.
.
Результати обчислень заносимо у таблицю.
Таблиця визначення частотних характеристик об’єкта
|
|
|
|
|
|
|
0 |
0,6 |
0 |
0,6 |
0 |
|
0,05 |
0,55 |
-29 |
0,51 |
-0,2 |
|
0,15 |
0,38 |
-50 |
0,24 |
-0,29 |
|
0.25 |
0,27 |
-63 |
0,12 |
-0,24 |
|
0,5 |
0,14 |
-76 |
0,04 |
-0,14 |
|
1 |
0,07 |
-83 |
0,009 |
-0,073 |
|
10 |
0,007 |
-89,2 |
0,00009 |
-0,007 |
- за каналом збурення Z3:
Визначаємо вирази АЧХ та ФЧХ:

Умовою перетину годографом АФХ дійсної осі (U) є виконання рівності, яка випливає з рівняння (2.19):
![]()
Дана
умова виконується при додатних частотах
![]() .
.
Уявна вісь годографа не перетинається.
Згідно
отриманих інтервалів частот задаємося
проміжними частотами для обчислення
![]() та
та![]() .
Результати обчислень заносимо у таблицю.
.
Результати обчислень заносимо у таблицю.
Таблиця визначення частотних характеристик об’єкта
|
|
|
|
|
|
|
0 |
0,6 |
0 |
0,6 |
0 |
|
0,05 |
0,55 |
-29 |
0,51 |
-0,2 |
|
0,15 |
0,38 |
-50 |
0,24 |
-0,29 |
|
0.25 |
0,27 |
-63 |
0,12 |
-0,24 |
|
0,5 |
0,14 |
-76 |
0,04 |
-0,14 |
|
1 |
0,07 |
-83 |
0,009 |
-0,073 |
|
10 |
0,007 |
-89,2 |
0,00009 |
-0,007 |