

GLAVN_J_DOK_TZA
.doc-
Визначення структурні, функціональні та принципові схеми. Навести приклад.
Структу́рна схе́ма — схема, яка визначає основні функціональні частини виробу, їх взаємозв'язки та призначення Структурна схема призначена для відображення загальної структури пристрою, тобто його основних блоків, вузлів, частин та головних зв'язків між ними. Із структурної схеми повинно бути зрозуміло, навіщо потрібний даний пристрій і як він працює в основних режимах роботи, як взаємодіють його частини. Позначення елементів структурної схеми можуть обиратись довільно, хоча загальноприйнятих правил виконання схем слід дотримуватись
Функціона́льна схе́ма — схема, що роз'яснює певні процеси, що відбуваються у певних функціональних ланцюгах виробу (устаткування) чи у виробі (устаткуванні) в цілому. Функціональна схема містить інформацію про способи реалізації пристроєм заданих функцій. За такою схемою можна визначити, як здійснюються перетворення і які для цього необхідні функціональні елементи. Кожен функціональний елемент містить лише ті входи і виходи, які необхідні для його коректної роботи. Дана схема розробляється на основі структурної схеми для кожного блоку, в результаті з окремих функціональних елементів складається загальна функціональна схема об'єкту.
Принципо́ва схе́ма — схема, що визначає повний склад елементів і зв'язків між ними і, як правило, дає детальне уявлення про принципи роботи виробу (установки). Для зображення на принципових схемах елементів і пристроїв використовують умовні графічні позначення, встановлені відповідними стандартами ЄСКД. На принциповій схемі зображують всі елементи і пристрої, необхідні для здійснення і контролю заданих процесів, всі зв'язки між елементами, а також елементи, якими закінчуються вхідні і вихідні ланцюги. Принципові схеми виконують без дотримання масштабу, дійсне просторове розташування складових частин не враховується, або враховується приблизно. Кожний елемент, зображений на принциповій схемі, повинен мати літерно-цифрове позиційне позначення. Для позиційних позначень використовують переважно літери латинського алфавіту та арабські цифри, які проставляють на схемі поряд з умовними графічними позначеннями елементів з правої сторони або над ними. Позиційне позначення елемента в загальному випадку складається з трьох частин, які вказують вид елемента, його номер і функцію. Вид і номер — обов'язкова частина літерно-цифрової позиційної познаки. Вони повинні бути надані всім елементам. Покажчик функції елемента не призначений для ідентифікації елемента і не є обов'язковим.
-
Види сигналів, та їх призначення.
Сигна́л —зміна фізичної величини (наприклад, температури, тиску повітря, світлового потоку, сили струму тощо), що використовується для пересилання даних[. Саме завдяки цій зміні сигнал може нести в собі якусь інформацію . Інше визначення: сигнал — фізичний процес, властивості якого визначаються взаємодією між матеріальним об'єктом та засобом його дослідження.
За фізичною природою носія інформації:
механічний сигнал — сигнал у вигляді механічного діяння твердого тіла, у якого дієвою величиною є сила, момент сили або переміщення;
електричний сигнал — сигнал у вигляді електричного діяння, дієвою величиною якого є сила струму або напруга;
радіосигнал — сигнал у вигляді діяння електромагнітного випромінювання, дієвою величиною якого є напруженість електричного поля або магнітного поля;
оптичний сигнал — сигнал у вигляді діяння оптичного випромінювання, дієвою величиною якого є потік випромінювання;
акустичний сигнал — сигнал у вигляді діяння звуку, дієвою величиною якого єзвуковий тиск
гідравлічний (пневматичний) сигнал — сигнал у вигляді механічного діяння рідини (газу), дієвою величиною якого є тиск.
За способом задання сигналу:
регулярні (детерміновані), задані аналітичною функцією;
нерегулярні (випадкові), які приймають довільні значення в будь-який момент часу. Для опису таких сигналів використовуються засоби теорії ймовірності;
Залежно від функції, що описує параметри сигналу, виділяють аналогові, дискретні, квантовані та цифрові сигнали.:
неперервні (аналогові), що описуються неперервною функцією;
дискретні, що описуються функцією відліків, взятих в певні моменти часу;
квантовані за рівнем;
дискретні сигнали, квантовані за рівнем (цифрові),
модульовані сигнали.
Аналоговий сигнал — сигнал, інформаційний параметр якого змінюється безперервно.
Анізохронний сигнал — сигнал, у якого інтервали часу між сусідніми значущими моментами не обов'язково рівні чи кратні одиничному інтервалу.
Вхідний сигнал — сигнал, що надходить на вхід системи, пристрою чи елемента.
Двійковий сигнал — сигнал, параметри якого можуть приймати тільки одне з двох можливих значень.
Дискретний сигнал — сигнал, інформативний параметр якого може змінюватися тільки переривчасто та мати тільки скінченну кількість значень у заданому діапазоні протягом певного інтервалу часу.
Ізохронний сигнал — сигнал, у якого інтервали часу між сусідніми значущими моментами рівні чи кратні одиничному інтервалу.
Кодовий сигнал — дискретний сигнал, інформативний параметр якого визначений в умовних символах відповідно до певного коду.
Модульований сигнал — сигнал, що є результатом взаємодії двох або більше сигналів, які модулюються та модулюють.
Модулювальний сигнал — сигнал, що використовується для зміни якого-небудь параметра сигналу, що модулюється, в залежності від виду модуляції.
Приведений сигнал — сигнал, перетворений в один із стандартизованих видів.
Сигнал керування — сигнал, передбачений для впливу на об'єкт керування з метою виконання вказівки, яка є в команді.
Сигнал синхронізації — періодичний сигнал для тимчасового узгодження всіх синхронних операцій.
Сигнал стимуляції — сигнал, який подають на вхід об'єкта з метою отримання інформації про його технічний стан.
Цифровий сигнал — дискретний сигнал з певним значенням інформативного параметра, яке визначається у цифровій формі.
Сигнал розузгодження (Δ(y)) – векторна різниця між поточним значенням параметра і заданим. Цей сигнал звичайно надходить на вхід регулювального пристрою (у САР).
-
Визначення агрегатування, типізація, уніфікація. Навести приклад.
Типізація — це система заходів, скерованих на зведення зайвої різноманітності конструкцій до обмеженого переліку технічно й економічно найдосконаліших сучасних типів обладнання для розробки типових проектів. Вона сприяє виявленню і відбору торгових меблів, що виправдали себе на практиці. Вироби меблів одного типу, подібні за формою, призначенням, конструкцією, можуть різнитися лише розмірами. Кожний розмір окремого виду обладнання одного типу називається типорозміром, а кілька його типорозмірів становлять параметричний (розмірний) ряд.
Уніфікація — приведення деталей, що входять до обладнання до єдиних форм, конструкцій і розмірів. Уніфіковані деталі можуть повторюватись або в одній моделі, або в наборах обладнання, тобто вони стають взаємозамінними. Це дозволяє уникнути зайвої різноманітності деталей, що мають однакове призначення, створити оптимальний набір для збирання різних типів механізмів, знизити витрати на їх виробництво й експлуатацію.
Агрегатува́ння — метод створення машин та їх комплексів шляхом компонування їх із обмеженої кількості стандартних і уніфікованих деталей, вузлів і агрегатів, що мають геометричну та функціональну взаємозамінність. У теорії стандартизаціїагрегатування розглядається як один з методів уніфікації, поряд із взаємозамінністю, типізацією та симпліфікацією. Агрегатування широко застосовується при створенні машин різного призначення, оскільки дозволяє найраціональніше організувати виробництво і експлуатацію машин.
-
Етапи розвитку технічних засобів автоматизації.
-
Види технічних засобів та їх класифікація.
Всі автоматичні системи складаються з автоматичних пристроїв, в які входять різноманітні елементи — прилади, механізми, апарати та ін. Елемент — це частина автоматичного пристрою, в якому відбуваються кількісні і якісні перетворення фізичних величин. Залежно від виконуваних функцій в автоматичному пристрої всі елементи поділяються на три основні групи: первинні, проміжні і кінцеві. Первинна група складається із задавальних і сприймальних елементів (задатчиків і датчиків) для добування первинної інформації. Проміжна група складається з підсилюючих і перетворюючих елементів (підсилювачів, перетворювачів, реле), які здійснюють зв'язок між первинними і кінцевими елементами. Кінцева група складається з виконавчих елементів (механізмів, приладів), які впливають на керуючий об'єкт. Якщо виконавчі елементи мають механічний вихід, то їх називають виконавчими механізмами. Первинні елементи автоматичних пристроїв. До цієї групи належать задавальні і сприймаючі елементи. Задавальні елементи, або задатчики, задають програму, яку має виконати автоматична система. За допомогою задатчика настроюють автоматичну систему на відповідний режим роботи або встановлюють порядок дій та керуючий об'єкт. Сприймаючий елемент сприймає іззовні величини, на які він реагує
-
Схеми підключення термоелектричних перетворювачів. Чи можна підключати термоелектричні перетворювачі за двох провідною схемою з вбудованим джерелом живлення?
Так,можна.
-
Схеми підключення термоперетворювачів опору. Чи можна підключати термоперетворювачі опору за чотирьох провідною схемою із зовнішнім джерелом живлення?
Так можна підключити і за 4-х провідною схемою, у нас буде висока точність вимірювання, адже компенсується вплив похибки від довжини дротів та зовнішній вплив навколишнього середовища.
-
Схеми підключення датчиків з уніфікованим вихідним сигналом 4-20 мА. Чи можна підключати датчики з уніфікованим вихідним сигналом 4-20 мА до локальних засобів автоматизації без зовнішнього джерела живлення?
ТАК МОЖНА.
-
Схеми підключення датчиків з уніфікованим вихідним сигналом 4-20 мА. Чи можна підключати датчики з уніфікованим вихідним сигналом 4-20 мА до локальних засобів автоматизації по двох провідній схемі із зовнішнім джерелом живлення?
ТАК МОЖНА
-
Види вихідних пристроїв. Чи використовується цифро аналоговий перетворювач 4-20 мА для підключення датчиків з уніфікованим вихідним сигналом по двох провідній схемі.
ВИХІДНИЙ ПРИСТРІЙ ЦЕ ПРИСТРІЙ ДЛЯ ПЕРЕДАЧІ РЕЄСТРУЮЧИ АБО КЕРУЮЧИХ СИГНАЛІВ НА ВИКОНАВЧИЙ МЕХАНІЗМ .
ТАК, ВИКОРИСТОВУЄТЬСЯ.ВИХІД ЦАП ПОДАЄТЬСЯ НА ТРАНЗИСТОР, ВИХОДИ ЯКОГО ПІДКЛЮЧАЮТЬСЯ ВІДПОВІДНО ДО «+» ТА ЧЕРЕЗ ОПІР НАВАНТАЖЕННЯ ДО «-»
-
Види вихідних пристроїв. Чи можна використати вихідний пристрій на базі симісторної оптопари, для формування сигналу 0-10 В.
НІ, ДЛЯ ФОРМУВАННЯ СИГНАЛУ 0-10 В ВИКОРИСТОВУЄТЬСЯ ЦАП.
-
Види вихідних пристроїв. Чи можна використати вихідний пристрій на базі транзисторної оптопари, для підключення датчиків з уніфікованим вихідним сигналом 4-20 мА по двох провідній схемі.
-
Види вихідних пристроїв. Чи використовується цифро аналоговий перетворювач 0-10 В для управління низьковольтним електромагнітним або твердотілим реле постійного струму.
НІ, ДЛЯ УПРАВЛІННЯ НИЗЬКОВОЛЬТНИМ ЕЛЕКТРОМАГНІТНИМ АБО ТВЕРДОТІЛИМ РЕЛЕ ПОСТІЙНОГО СТРУМУ ВИКОРИСТОВУЄТЬСЯ ТРАНЗИСТОРНА ОПТОПАРА(ВИХІД «Т»)
-
Обробка вхідного сигналу в локальних регуляторах. Чи можна використати постійну часу фільтра для компенсації похибки датчиків?
КОРЕКЦІЯ ЦЕ КОМПЕНСАЦІЯ ПОХТБКИ ДАТЧИКІВ. І ДЛЯ УСЕНЕННЯ ПОЧАТКОВОЇ ПОХИБКИ ВИКОР, ЗСУВ ТА ЗМІНА НАХИЛУ. А ПОСТІЙНА ЧАСА ПРИЗВОДИТЬ ДО УПОВІЛЬНЕННЯ РЕАКЦІЇ ПРИЛАДУ НА ЗМІНІ ВХІДНОЇ ВЕЛЕЧИНИ, АЛЕ ПЕРЕШКОДИ ЗНАЧНО ПРИГНІЧЕНІ .
-
Обробка вхідного сигналу в локальних регуляторах. Чи можна використати цифрову фільтрацію вимірювань для компенсації похибок, що вносяться опорами підвідних проводів?
НІ НЕ МОЖНА ОСКІЛЬКИ КОМПЕНСАЦІЯ ПОХИБОК, ЩО ВНОСИТЬСЯ ОПОРАМИ ПІДВІДНИХ ПРОВОДІВ ЦЕ КОРЕКЦІЯ ЗСУВУ .
-
Обробка вхідного сигналу в локальних регуляторах. Чи можна використати глибину фільтра для компенсації похибок, які виникають через розкид вхідних опорів різних каналів вимірювання?
НІ НЕ МОЖНА ВИКОРИСТОВУВАТИ, ОСКІЛЬКИ ДЛЯ КОРЕКЦІЇ ПОХИБКИ ЯКІ ВИНИКЛИ ЧЕРЕЗ РОЗКИД ВХІДНИХ ОПОРІВ РІЗНИХ КАНАЛІВ ВИМІРЮВАННЯ ВИКОР. КОРЕКЦІЮ (НАХИЛУ ХАР-КИ).
ДЛЯ КОМПЕНСАЦІЇ ПОХИБОК, ЯКІ ВИНИКАЮТЬ ЧЕРЕЗ РОЗКИД ВХІДНИХ ОПОРІВ РІЗНИХ КАНАЛІВ ВИМІРЮВАННЯ ВИКОРИСТОВУЄТЬСЯ КОРЕКЦІЯ «НАХИЛ ХАРАКТЕРИСТИКИ».
-
Обробка вхідного сигналу в локальних регуляторах. Чи можна використати корекцію «зсув характеристики» для визначення різниці вимірюваних величин?
ЗСУВ ХАРАКТЕРИСТИКИ ВИКОР. ДЛЯ КОМПЕНСАЦІЇ ПОХИБОК, ЩО ВНОСИТЬСЯ ОПОРАМИ ПІДВІДНИХ ПРОВОДІВ , І ПОХИБОК ЯКІ ВИНИКАЮТЬ ЧЕРЕЗ РОЗКИД ВХІДНИХ ОПОРІВ 1-ГО І 2-ГО КАНАЛІВ ВИМ. (ПРИ ВИКОР. ДАТЧИКІВ З ВИХІДНИМ СИГНАЛОМ )
-
Обробка вхідного сигналу в локальних регуляторах. Чи можна використати корекцію «нахил характеристики» для визначення мінімального і максимального значення виміряних величин?
КОРЕКЦІЯ НАХИЛУ ХАР-КИ ВИКОР. ДЛЯ КОМПЕНСАЦІЇ ПОХИБОК ДАТЧИКІВ (ПРИ ВІДХИЛЕННІ ЗНАЧЕННЯ W 100 У ТЕРМОПЕРЕТВОРЮВАЧІВ ОПОРУ І ПОХИБОК, ЯКІ ВИНИКАЮТЬ ЧЕРЕЗ РОЗКИД ВХІДНИХ ОПОРІВ РІЗНИХ КАНАЛІВ ВИМІРЮВАННЯ.
-
Обробка вхідного сигналу в локальних регуляторах. Чи можна назвати глибиною фільтра інтервал, протягом якого вихідний сигнал досягає 0,63 від величини остаточного значення?
НІ НЕ МОЖНА ОСКІЛЬКИ ТАКА ФІЛЬТРАЦІЯ ЦЕ ПОСТІЙНА ЧАСУ
-
Чи можна використати П-подібну логіку двопозиційного регулятора для захисту вихідного пристрою від частих спрацьовувань при роботі логічного пристрою в режимі компаратора?
МОЖНА. П- ПОДІБНА, ЗАСТОСОВ. ПРИ ВИКОР.ПРИЛАДУ ПРИ СИГНАЛІЗАЦІЇ, ПРО ВХІД КОНТРОЛЬОВАНОЇ ВЕЛИЧИВ ЗАДАНІ МЕЖІ . ПРИ ТУСТ- Δ<T<TУСТ+ Δ
КОМПАРАТОР (АНАЛОГОВИХ СИГНАЛІВ) (АНГЛ. COMPARATOR - ПОРІВНЮЮЧИЙ ПРИСТРІЙ [1]) - ЕЛЕКТРОННА СХЕМА, ЩО ПРИЙМАЄ НА СВОЇ ВХОДИ ДВА АНАЛОГОВИХ СИГНАЛУ І ВИДАЄ ЛОГІЧНУ «1», ЯКЩО СИГНАЛ НА ПРЯМОМУ ВХОДІ («+») БІЛЬШЕ НІЖ НА ІНВЕРСНОМУ ВХОДІ («-»), І ЛОГІЧНИЙ «0», ЯКЩО СИГНАЛ НА ПРЯМОМУ ВХОДІ МЕНШЕ, НІЖ НА ІНВЕРСНОМУ ВХОДІ.
-
Чи використовується затримка включення і виключення вихідного пристрою, для порівняння значень вхідної величини з уставкою та формуванні керуючого сигналу на вихідний пристрій відповідно до заданої логіки?
ДЛЯ ЗАХИСТУ ВИХІДНОГО ПРИСТРОЮ ВІД ЧАСТИХ СПРАЦЬОВУВАНЬ ПРИ РОБОТІ ЛУ В РЕЖИМІ КОМПАРАТОРА, В БАГАТЬОХ ПРИЛАДАХ ОВЕН (НАПРИКЛАД ТРМ1, 2ТРМ1, МПР51, ТРМ138) Є ПАРАМЕТРИ ДЛЯ УСТАНОВКИ ЧАСУ ЗАТРИМКИ ВКЛЮЧЕННЯ TВКЛ І ЧАСУ ЗАТРИМКИ ВИМКНЕННЯ TВИКЛ ВИХІДНОГО ПРИСТРОЮ. ЛУ ВКЛЮЧАЄ (ВИМИКАЄ) ВИХІДНИЙ ПРИСТРІЙ, ЯКЩО УМОВА, ЩО ВИКЛИКАЄ ЗМІНУ СТАНУ, ЗБЕРІГАЄТЬСЯ, ЯК МІНІМУМ, ПРОТЯГОМ ЧАСУ, ВСТАНОВЛЕНОГО В ЦИХ ПАРАМЕТРАХ. МОЖЛИВО ВОНО
-
Чи можна використати U- подібну логіку для сигналізації, при якій відбувається утримання вихідного пристрою в замкнутому і розімкнутому стані протягом заданого часу?
У-ПОДІБНА ЗАСТОСОВ ДЛЯ СИГНАЛІЗАЦІЇ ПРО ВХІД КОНТРОЛЬОВАНОЇ ВЕЛИЧИНИ ЗА ЗАДАНІ ГРАНИЦІ . ЗАДЄТЬСЯ МОЖЕ Вихідний пристрій викл при Т<Туст- Δ і Т>Туст+ Δ
-
Чи вірне твердження, що при широтно-імпульсному регулюванні стан вихідного сигналу змінюється на протилежний, якщо вхідний сигнал (вимірювана величина) перетинає пороговий рівень (уставку)?
ШІМ ВИКОРИСТ. В ТИХ ВИПАДКАХ, КОЛИ Є РЕЖИМ АНАЛОГОВОГО РЕГУЛЮВАННЯ, А ВХІДНІ ПРИСТРОЇ Є ДИСКРЕТНОГО ТИПУ (РЕЛЕ, ТРАНЗИСТОР, СЕМІСТОР)

ШІМ полягає на тому, що вихідний сигнал перетворюється у послідовністю імпульсів з тривалістю Д=У*Тсп/100%
У-вих. Сигнал регулятора
Тсп-період проходження імпульсів
-
Чи можна використати функцію обмеження швидкості виходу контрольованої величини на задане значення для аварійної сигналізації про вихід параметра за встановлені межі.
ОБМЕЖЕННЯ ШВИДКОСТІ ВИХОДУ КОНТРОЛЬОВАНОЇ ВЕЛИЧИНИ НА ЗАДАНИЙ ЗНАЧЕННЯ ВИКОРИСТОВУЄТЬСЯ ДЛЯ ЗАПОБІГАННЯ ПЕРЕРЕГУЛЮВАННЯ ПРИ ЗАПУСКУ СИСТЕМИ (КРИВА I). ФІКСОВАНЕ ЗНАЧЕННЯ УСТАВКИ ЗАМІНЮЮТЬ НА «ПЛАВАЮЧЕ», ЯКЕ ПОСТУПОВО НАБЛИЖАЮТЬ ДО ЗНАЧЕННЯ ТУСТ. (КРИВА II). НАБЛИЖЕННЯ ВІДБУВАЄТЬСЯ СПОЧАТКУ ЗІ ШВИДКІСТЮ VУСТ. , ПОТІМ ШВИДКІСТЬ ПОСТУПОВО ЗМЕНШУЄТЬСЯ (ДИВ. РИС.). РЕКОМЕНДОВАНЕ ЗНАЧЕННЯ VУСТ. ВИЗНАЧАЄТЬСЯ ПРИЛАДОМ ПРИ АВТОНАСТРОЙЦІ І ЗАБЕЗПЕЧУЄ ПЕРВІСНУ ВЕЛИЧИНУ ПЕРЕРЕГУЛЮВАННЯ (ПЕРШОГО «ВИБІГУ») НЕ БІЛЬШЕ Δ. ПРИ ВИКОРИСТАННІ ШВИДКОСТІ ВИХОДУ НА УСТАВКУ ЗРОСТАЄ ЧАС ВИХОДУ НА РОБОЧИЙ РЕЖИМ. ТОМУ ЯКЩО ЗАТРИМКА ПРИВОДИТЬ ДО НЕЗАДОВІЛЬНИХ РЕЗУЛЬТАТІВ, ПОТРІБНО ЗБІЛЬШИТИ VУСТ. АБО ВІДКЛЮЧИТИ ДІЮ ПАРАМЕТРА.
-
На які вхідні сигнали розрахована базова конфігурація локального регулятора SIPART DR21
-ДВА АНАЛОГОВИХ ВХОДИ ДЛЯ СТРУМУ 0/4 ДО 20 МА, БЕЗ ПОДІЛУ ПОТЕНЦІАЛІВ. ЧЕРЕЗ ПЕРЕТВОРЮВАЧІ СИГНАЛІВ МОЖЛИВЕ РОЗШИРЕННЯ ДО 4-Х АНАЛОГОВИХ ВХОДІВ. - ДВА ДВІЙКОВИХ ВХОДИ, ПОТЕНЦІЙНО ПОВ'ЯЗАНІ. ЧЕРЕЗ ПЕРЕТВОРЮВАЧІ СИГНАЛІВ МОЖЛИВЕ РОЗШИРЕННЯ ДО 4-Х АБО 7-МИ ПОТЕНЦІЙНО ПОВ'ЯЗАНИХ ДВІЙКОВИХ ВХОДІВ.
-
На які вхідні сигнали розрахований UNI-Модуль локального регулятора SIPART DR21 та з якого меню конфігурації він налаштовується.
ДЛЯ КОНФІГУРУВАННЯ РЕГУЛЯТОРА SIPART DR21 Є НАСТУПНІ МОДУЛІ ПАРАМЕТРУВАННЯ І СТРУКТУРУВАННЯ: (CAE3) -> ТУТ ЗДІЙСНЮЄТЬСЯ НАЛАШТУВАННЯ ДІАПАЗОНУ ВИМІРЮВАННЯ ДЛЯ UNI-МОДУЛЯ І ПРИ НЕОБХІДНОСТІ ТОЧНА КОРЕКЦІЯ. МЕНЮ САЕ3 ВКЛЮЧАЄТЬСЯ ТІЛЬКИ ПРИ ВСТАВЛЕНОМУ UNI-МОДУЛІ І ЗВІЛЬНЕННЯ НА РІВНІ СТРУКТУРУВАННЯ (СТРУКТУРНИЙ ПЕРЕМИКАЧ S> 3). UNI-МОДУЛЬ - ПРЯМЕ ПІД'ЄДНАННЯ ТЕРМОПАР АБО PT100, ПОТЕНЦІОМЕТРИЧНИХ ДАТЧИКІВ АБО ДАТЧИКІВ МВ. СЕНСОРИ ВИМІРЮВАНОЇ ВЕЛИЧИНИ, ЯК ТО ТЕРМОПАРИ (ТЗ), ТЕРМОМЕТРИ ОПОРУ PT100 (RTD), ДАТЧИКИ ОПОРУ (R) АБО ДАТЧИКИ НАПРУГИ В ДІАПАЗОНІ МВ МОЖУТЬ БУТИ ПІДКЛЮЧЕНІ БЕЗПОСЕРЕДНЬО. ВИБІР ВИМІРЮВАНОЇ ВЕЛИЧИНИ ЗДІЙСНЮЄТЬСЯ ЧЕРЕЗ КОНФІГУРУВАННЯ РЕГУЛЯТОРА НА РІВНІ STRS (СТРУКТУРНІ ПЕРЕМИКАЧІ S6, S8, S9 S10); ДІАПАЗОН ВИМІРЮВАННЯ ТА ІНШІ ПАРАМЕТРИ ВСТАНОВЛЮЮТЬСЯ В МЕНЮ САЕ3. ВІДНОСЯТЬСЯ ДО СЕНСОРА ХАРАКТЕРИСТИКИ (ЛІНЕАРИЗАЦІЯ) ДЛЯ ТЕРМОПАР І ТЕРМОМЕТРА ОПОРУ PT100 ЗНАХОДЯТЬСЯ В ЗУ ПРОГРАМ РЕГУЛЯТОРА І МАЮТЬСЯ НА УВАЗІ АВТОМАТИЧНО. НА САМОМУ МОДУЛІ ВІДСУТНЯ НЕОБХІДНІСТЬ ДОДАТКОВИХ НАЛАШТУВАНЬ. ПІДКЛЮЧЕННЯ СИГНАЛЬНИХ ЛІНІЙ ЗДІЙСНЮЄТЬСЯ ЧЕРЕЗ ШТЕПСЕЛЬНИЙ КЛЕМНИЙ БЛОК З ГВИНТОВИМИ КЛЕМАМИ. ПРИ ВИКОРИСТАННІ ТЕРМОПАР З ВНУТРІШНЬОЇ ТЕРМОКОМПЕНСАЦІЄЮ ДАНИЙ КЛЕМНИЙ БЛОК ПОВИНЕН БУТИ ЗАМІНЕНИЙ НА З'ЄДНУВАЛЬНІ КЛЕМИ 6DR2805-8A. ЗА ДОПОМОГОЮ ШТЕКЕРА ДІАПАЗОНУ ВИМІРЮВАННЯ 6DR2805-8J НА МІСЦІ КЛЕМНОГО БЛОКУ МОЖЕ БУТИ ЗДІЙСНЕНО РОЗШИРЕННЯ ДІАПАЗОНУ ПРЯМОГО ВХОДУ (0/20 ... 100 МВ) ДО 0/2 ... 10 В АБО 0/4 ... 20 МА. МОДУЛЬ UNI ПРАЦЮЄ З ПЕРЕТВОРЮВАЧЕМ AD З 18-БІТНИМИ РОЗШИРЕННЯМИ. МІЖ ВИМІРЮВАЛЬНИМИ ВХОДАМИ І МАСОЮ ОСНОВНОГО ПРИЛАДУ ЗНАХОДИТЬСЯ ГАЛЬВАНІЧНИЙ РОЗДІЛЬНИК З ДОПУСТИМИМ СИНФАЗНИХ НАПРУГОЮ В 50 В UC. МОДУЛЬ UNI МОЖЕ ВИКОРИСТОВУВАТИСЯ ТІЛЬКИ В ГНІЗДІ 1 (АЕ3)
-
Радіочастотний ідентифікатор. Що таке нормальна частота опитування?
РАДІОЧАСТОТНЕ РОЗПІЗНАВАННЯ ЗДІЙСНЮЄТЬСЯ ЗА ДОПОМОГОЮ ЗАКРІПЛЕНИХ ЗА ОБ'ЄКТОМ СПЕЦІАЛЬНИХ МІТОК, ЩО НЕСУТЬ ІДЕНТИФІКАЦІЙНУ ТА ІНШУ ІНФОРМАЦІЮ. ПРО ЦЕЙ МЕТОД, ЩО ВЖЕ СТАВ ОСНОВОЮ ПОБУДОВИ СУЧАСНИХ БЕЗКОНТАКТНИХ ІНФОРМАЦІЙНИХ СИСТЕМ, І ЩО МАЄ СТІЙКУ НАЗВУ RFID-ТЕХНОЛОГІЇ.
НОРМАЛЬНА ЧАСТОТА ОПИТУВАННЯ ВИЗНАЧАЄ ПЕРІОД ЧАСУ, З ЯКИМ ПЕРЕТВОРЮВАЧ ЗЧИТУЄ ЗНАЧЕННЯ КОНТРОЛЬОВАНОЇ ЗМІННОЇ ПРОЦЕСУ.
-
Вибір рівнів нормальних значень для безпровідної передачі та аномальна швидкість передачі інформації.
АНОМАЛЬНА ШВИДКІСТЬ ПЕРЕДАЧІ ІНФОРМАЦІЇ ІДЕНТИЧНА НОРМАЛЬНОЇ ШВИДКОСТІ ПЕРЕДАЧІ З ОДНИМ ВИКЛЮЧЕННЯМ. АНОМАЛЬНА ШВИДКІСТЬ ПЕРЕДАЧІ ІНФОРМАЦІЇ ВИКОРИСТОВУЄТСЯ ТІЛЬКИ ТОДІ, КОЛИ ПЕРЕТВОРЮВАЧ ПЕРЕБУВАЄ В АНОМАЛЬНОМУ СТАНІ.
-
Регулювання по програмі та ПІД регулювання. Навести приклад для локальних регуляторів ф.Тера
Найбільш висока точність підтримки технологічного параметра забезпечується при використанні ПІД (ПІ) закону регулювання; при такому регулюванні точність підтримки технологічного параметра за допомогою приладу залежить від правильності вибору параметрів ПІД (ПІ)-регулятора. При використанні ПІД (ПІ) регулювання важливо правильно ввести параметри клапана, вибрати період регулювання, коефіцієнт пропорційності, час інтегрування і час диференціювання. Підбір коефіцієнта пропорційності, часу інтегрування і часу диференціювання називається настройкою ПІД (ПІ)-регулятора.
Автоматичне налаштування ПІД (ПІ)- регулятора
Самонастройка регулятора призначена для автоматичного визначення коефіцієнтів ПІД-регулятора на конкретному об'єкті і для конкретного контрольованого параметра. Самонастройка проводиться при будь-якому стабільному значенні контрольованого параметра об'єкта управління. Для стабілізації результату виміру об'єкта управління перейдіть в режим ручного регулювання та встановіть будь-яку постійну вихідну потужність (зазвичай рекомендується встановити 0). Перед початком самонастройки установіть: - Вид об'єкта управління (нагрівач або холодильник); - Задане значення контрольованого параметра (повинно перевищувати виміряний для нагрівача або бути менше виміряного для холодильника); рекомендована різниця параметрів - від 40 до 100 градусів; - Гістерезис; - Період регулювання. Ручна настройка ПІД (ПІ)- регулятора може бути проведена двома методами: - Методом автоколивань; - Методом ідентифікації; Для настройки регулятора необхідний секундомір. (МЕТОДА)
-
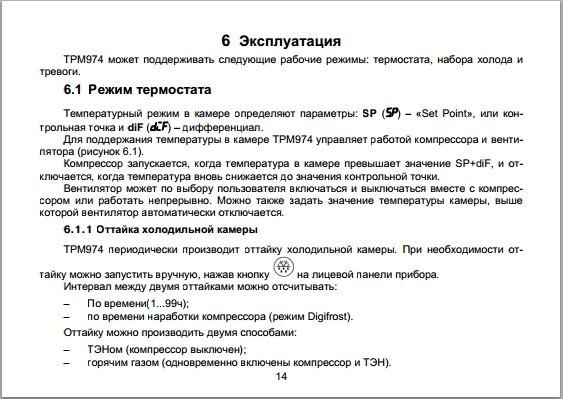
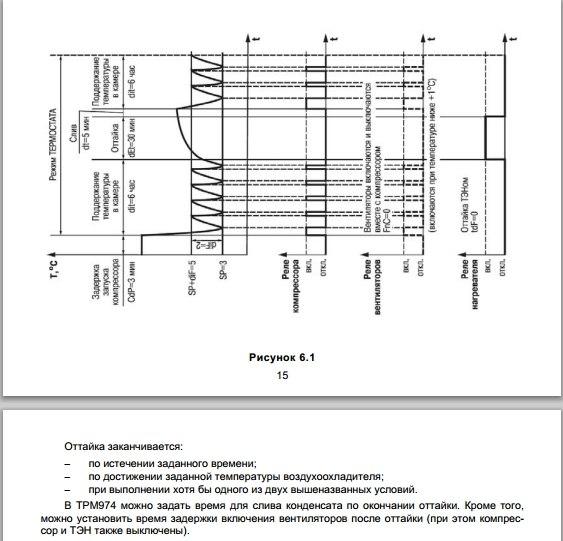
Наведіть як та які функції виконуються приладом ТРМ 974 коли він працює в режимі термостату
-
Конфігурація роботи вентиляторів під час підтримання заданої температури в камері в локальних регуляторах ТРМ 974
1.1 Блок управления ТРМ974 (далее – «прибор») предназначен для контроля и регулирования температур в средне- и низкотемпературных холодильных установках с автоматической разморозкой.
1.2 Прибор измеряет температуру при помощи двух РТС-датчиков (Positive TemperatureCoefficient). Для поддержания температуры ТРМ974 управляет работой компрессора, вентилятором и нагревателем.
1.4 Приборы ТРМ974 выпускаются в корпусах двух типов:

Щ – щитовой ЩЗ, 74x32x70 мм, степень защиты IP54 со стороны передней панели;
Д – DIN-реечный 72x88x54 мм, степень защиты IP20
Вентиляторы имеют 2 режима роботы: вкл/выкл

В ТРМ974 можно задать время для слива конденсата по окончании оттайки. Кроме того,можно установить время задержки включения вентиляторов после оттайки (при этом компрессор и ТЭН также выключены).
-
Наведіть як та які функції виконуються приладом ЕКС301 при управлінні охолоджувальними камерами.
|
Параметр |
Код параметр. |
Мін. значення |
Мах. значення |
Налаш. виробника |
|
Установка температури |
|
-60 |
50 |
3 |
|
Термостат |
||||
|
Диференціал (1) |
r01 |
0.1К |
20К |
2К |
|
Макс. знач. температури |
r02 |
-59 |
50 |
50 |
|
Мін. знач. температури |
r03 |
-60 |
49 |
-60 |
|
Калібрування дач. темпер. |
r04 |
-20К |
20К |
0К |
|
Температурна шкала С/F |
r05 |
C |
F |
C |
|
Аварійна сигналізація |
||||
|
Верхнє відключення(вищі налаштуван.+диференціал) (2) |
А01 |
0К |
50К |
10К |
|
Нижня відключення(нижня налаштуван.+диференціал) (2) |
А02 |
-50К |
0К |
-10К |
|
Затримка аварійного сигналу по температурі |
А03 |
0мин |
90мин |
30мин |
1- Реле компресора спрацьовує, коли температура в камері перевищує встановлене значення і диференціал.
2- Якщо температура в камері перевищує задане значення на 5 ° С і більше за діапазоном від -60 до +50 ° С, то спрацьовує сигналізація і на дисплеї відображається відмова датчика.
3- Протягом перших трьох днів контролер буде використовувати це зна- чення, потім він сам його обчислить, як середню тривалість вкл. / викл.
4- З'являються такі функціональні можливості при використанні однополюсного перемикача SPDT, що підключається до клем 3 та 4: • Дверна сигналізація. Якщо контакт (SPST) розмикається, спрацювання сигналізації і вентилятор зупиняється, як в А 04 або F 02. • відтайка. Якщо контакт замкнутий, то починається відтайка. Однак, якщо d 03 не в змозі OFF (Вимкнути), то відтайка буде відбуватися з запрограмованим часовими інтервалами, поки контакт розімкнений. • Моніторинг через передачу даних. З встановленої мережевий карти стан контактів SPST надходять у систему збору даних
5- Тільки при встановленні мережевої карти. о4 автоматично скидається на «off» після відправлення сигнал
-
Виконавчий механізм як складова виконавчого пристрою.
Викона́вчий механі́зм (ВМ);— у системах автоматичного регулювання — пристрій, що безпосередньо здійснює механічне переміщення (чи поворот) регулюючого органу об'єкта управління і змінює його стан.
Загальний опис
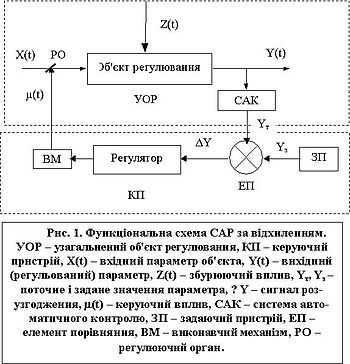
Місце виконавчого механізму (ВМ) у системі автоматичного регулювання (САР) показано на рис. 1.
Зміна положення регулюючого органу викликає зміну потоку енергії або матеріалу, що поступають на об'єкт, і тим самим впливає на робочі машини, механізми і технологічні процеси, усуваючи відхилення регульованої величини від заданого значення. Виконавчий механізм не лише змінює стан керованого об'єкта, але і переміщає регулюючий орган відповідно до заданого закону регулювання при мінімально можливих відхиленнях. У більшості випадків виконавчі механізми діють від сторонніх джерел енергії, оскільки безпосереднє управління виконавчим механізмом від первинних елементів регулювання (реле, датчиків тощо) неможливе внаслідок їхньої малої потужності, недостатньої для впливу на регулюючий орган.