

Виділення об’єкта моделювання
Котлоагрегат як об’єкт регулювання теплового навантаження можна представити у вигляді двух послідовно з’єднаних елементів: топки і випарювальної ділянки котла. Економайзерну та пароперегрівну ділянки котла умовно відносять до випарювальної ділянки.

Рисунок 3.3 Параметрична схема об’єкта.
Позначення повної параметричної схеми:
Fb - витрата палива;
Q - теплосприйняття топки;
Dr - кількість генеруємої пари;
Dк - кількість споживаної пари;
Fd - навантаження споживача;
Pb - тиск в барабані;
Рм - тиск в магістралі;
Математична модель для буде мати вигляд:
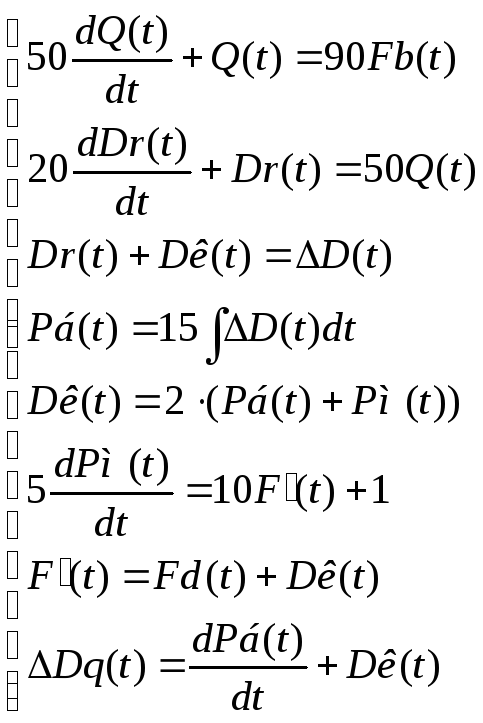
Числові значення постійних часу та коефіцієнтів передач наведені в структурній схемі.
Номінальні значення змінювання вхідних параметрів наведені в таблиці:
Таблиця 3.7
|
№ п/п |
Назва змінної |
Номінальне значення |
Можливі форми |
Зміни амплітуди |
|
1 |
Витрата газу Fb |
1 кг/с |
стрибок |
0,2 |
|
2 |
Витрата пари Fd |
9,7 кг/с |
стрибок |
1,9 |
Для дослідження математичної моделі використовується програмний пакет MatLab.
Використовуючи складену структурну схему, для отримання перехідних процесів подаємо на кожен вхід по черзі стрибкоподібні збурення величиною 20% від номінального значення. Значення ї приведені в таблиці 3.7.
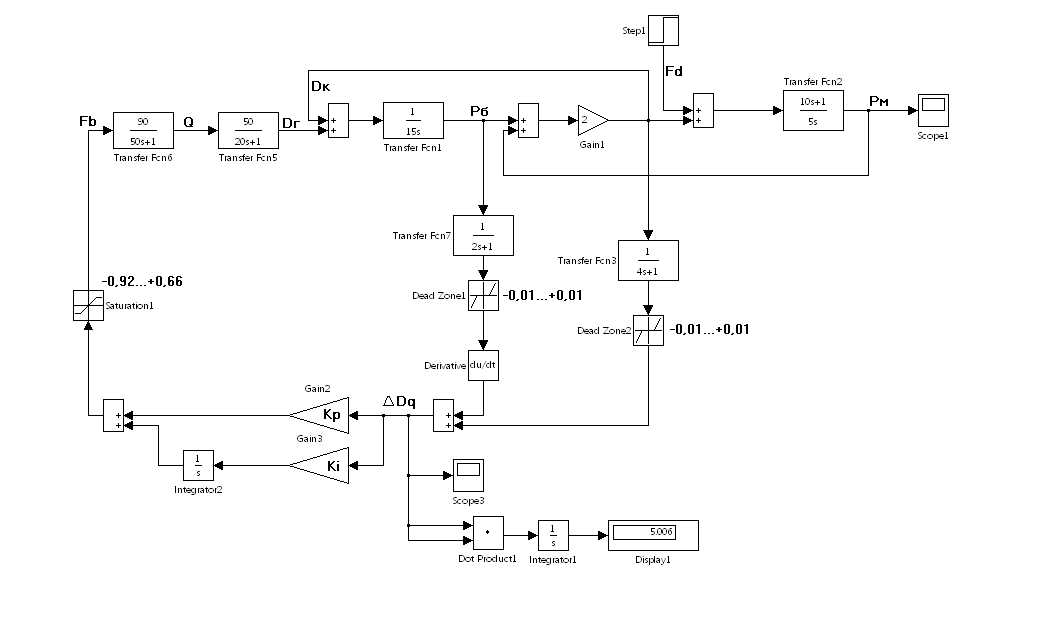
Рисунок 3.4 Структурна схема АСР
На першому етапі роботи аналізуємо можливість використання одноконтурної замкнутої автоматизованої системи регулювання, як найпростішої в галузі. Для стабілізації теплового навантаження в якості регулятора обираємо ПІ-регулятор.
Для того, щоб наблизити модель АСР до реальної системи, вводимо в неї обмеження (типу насичення) на зміну управляючої дії. А також так як математична модель була отримана стохастичним шляхом, необхідно моделювати інерційність датчиків.
Визначення оптимальних настройок регуляторів здійснюємо за допомогою методу Циглера-Нікольса. Спочатку перетворюємо ПІ-регулятор в П-регулятор, відключивши І-складову. Зміною коефіцієнта передачі регулятора Кр виводимо систему на межу стійкості і визначаємо значення Кр критичне. За співвідношеннями Кропт = 0,35Кркр , Тіопт = 1,25 Тікр визначаємо оптимальні настройки регуляторів.
Для контуру регулювання Кркр = 8,6 , Тікр = 85с.
Тоді Кропт =0,35·8,6=3,01 , Тіопт = 85·1.25 = 106,25с.
З отриманих графіків перехідних процесів (аркуш 6 графічної частини) можна зробити висновок, що регулятор розраховано правильно оскільки як при збільшенні так і при зменшенні на 20% настройок регулятора інтегрально квадратичний критерій якості збільшується.
3.10 Розрахунок та вибір виконуючих механізмів та регулюючих органів
В даному дипломному проекті запропонована система автоматизації, яка реалізована на основі електричних виконавчих механізмів типу МEО.
Механізми електричні одно оборотні постійної швидкості МЭО призначені для переміщення регулюючих органів в системах автоматичного регулювання технологічними процесами у відповідності з командними сигналами автоматичних регулюючих і пристроїв управління.
Принцип роботи механізмів полягає в перетворені електричного сигналу, який поступає від регулюючого або управляючого пристрою у обертальне переміщення вихідного валу.
Основні функції:
автоматичне дистанційне переміщення робочого органу;
автоматична чи дистанційна зупинка робочого органу арматури у будь-якому проміжному положенні;
ручне переміщення робочого органу арматури;
формування інформаційного сигналу про кінцеве і проміжне положення робочого органу арматури і динаміки його переміщення.
Основні параметри:
номінальний обертальний момент на вихідному валі в N.m(ньютон х метр);
номінальне значення повного ходу вихідного органу в оборотах;
номінальне значення часу повного ходу вихідного валу в секундах;
Необхідний обертальний момент забезпечується підбором потужності електродвигуна механізму, передавального співвідношення редуктора і його коефіцієнта корисної дії. Величина обертального моменту визначає габаритні розміри і масу механізму.
Виконавчий механізм повинен задовольняти певним вимогам:
він має забезпечувати швидкість регулювання, яка визначена динамікою системи;
повинен забезпечити лінійність ходової характеристики, тобто залежність між переміщенням вихідного елементу і потужністю командного сигналу;
він повинен задовольняти вимогам експлуатації, економічним показникам;
забезпечувати певну масу і певні габарити.
Виходячи із даних вимог використаємо виконавчі механізми з наступними технічними характеристиками:
1. МЭО-100/25-0,25-380В-У
номінальний обертальний момент на вихідному валу 100 Н∙м;
номінальний час повного ходу валу 25 с;
номінальний повний хід вихідного валу 0,25 об.;
споживана потужність 60 В∙А.
Регулюючий орган – це блок виконавчого пристрою, який діє на витрату речовини, тим самим змінюючи вихідну регулюючу величину. Кожен регулюючий орган повинен відповідати наступним вимогам:
вид регулюючого органу визначається хімічною речовиною, яка проходить через нього;
регулюючий орган повинен надійно працювати в широкому діапазоні температур;
Розрахуємо регулюючий орган (РО) подачі води на котел.
Вихідні дані розрахунку:
- витрата води Gmax=35т/год;
- перепад тисків при максимальній витраті Рро=1,5МПа;
- температура води Т20=30С;
- густина =0,9982г/см3;
- абсолютний тиск перед РО Р1=4,5МПа;
- абсолютний тиск водипри Т=30С Рнп=1,0МПа;
кінематична вязкість при Т=30С=0,01012см2/с;
коефіцієнт запасу.
Розрахунок.
1. Визначаємо максимальну пропускну здатність РО:
Кмах=Gmax![]() =
=![]() =
35∙0,816=28,55т/год
=
35∙0,816=28,55т/год
2. Вибираємо регулюючий орган типу клапан з умовою пропускною здатністю Кyмах=28,55∙3=85,65 т/год
Вибираємо регулюючий орган: Ду=200мм та Кy=100 т/год
3.Визначаємо число Рейнольдса:
Rey=3540∙Gmax/(∙Ду)=3540∙35/(0,01012∙200)=61215,4
Так як Rey>2000, тоді вплив вязкості на витрату не враховуємо і обраний РО перевіряємо на можливість кавітації.
4. Визначаємо коефіцієнт опору РО:
=25.4∙Fy2/Ky2=25.4∙(176,63) 2/360000=2,2
5. За кривою “Залежність коефіцієнта кавітації Ккавта Ккав мах від” визначаємо коефіцієнт кавітації:
Ккав=0.58
6. Визначаємо перепад тисків, при якому виникне кавітація:
Ркав=Ккав∙(Р1-Рнп)=0,58∙(4,5-1.0)=2,03Мпа
7. Визначаємо максимальну пропускну здатність РО:
Кмах=3∙Gmax![]() =3∙35
=3∙35![]() =73,63т/год
=73,63т/год
Так, як Кмах=73,63т/год менше ніж Ку=100т/год, тому обраний РО забезпечує задану максимальну витрату в умовах кавітації. Вибір РО за пропускною здатністю закінчено.
Інші регулюючі органи, які застосовані в системі автоматизації розраховуються аналогічно.