

4.3.2.7. Ручна настройка під (пі) регулятора методом автоколивань
Переведіть прилад в режим ручного управління клапаном. Встановіть необхідну задане значення температури, гістерезис, тип об'єкта управління, «Рг 1» рівний 0,1, «dF 1» рівний 0, «in 1» рівний 0. Переведіть прилад в режим автоматичного керування. Об'єкт буде управлятися по псевдо-двохпозиційному закону регулювання, відповідно при досягненні заданої уставки виникнуть незгасаючі коливання температури. Визначте величину А - розмах коливань температури в технічних одиницях і величину Р - період коливань у секундах.
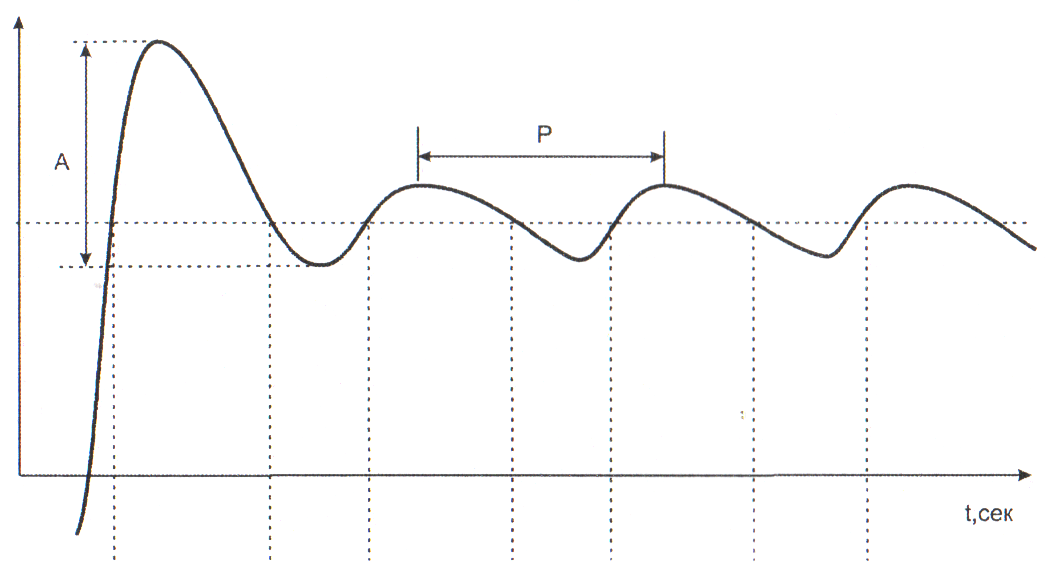
Рис. 4.2 - Результат вимірювання
Розрахуйте: - Коефіцієнт пропорційності ПІД-регулятора по формулі Рг = А; - Постійну часу інтегрування ПІД-регулятора по формулі In = 0,4 * Р; - Постійну часу диференціювання ПІД-регулятора по формулі Df = 0.05 * P; Переведіть прилад в режим ручного управління клапаном. Введіть отримані значення коефіцієнта пропорційності, часу інтегрування і часу диференціювання. Переведіть прилад в режим автоматичного керування клапаном. Переконайтеся, що регулятор виходить на задане значення параметра за 3 - 4 коливання і в сталому режимі коливання параметра відповідають заданій зоні нечутливості регулятора. Якщо після введення параметрів ПІД при виході на задане значення коливання не загасають, збільшуйте коефіцієнт пропорційності на величину перельоту в градусах. Якщо при виході на задане значення коливання загасають занадто повільно, збільшуйте коефіцієнт постійного часу інтегрування. Якщо регулятор занадто повільно реагує на зовнішні обурення, збільште постійну часу диференціювання.
4.3.2.8. Налаштування під (пі) регулятора методом ідентифікації об'єкта
Переведіть прилад в режим ручного управління клапаном. Повністю закрийте клапан. Дочекайтеся стабілізації виміряного значення параметра. Відкривайте клапан, при цьому зафіксуйте час запізнювання Тзап.- Інтервал часу між початком відкриття клапана і початком сталої зміни температури і максимальна швидкість Vmax зміни температури (в градусах за секунду).
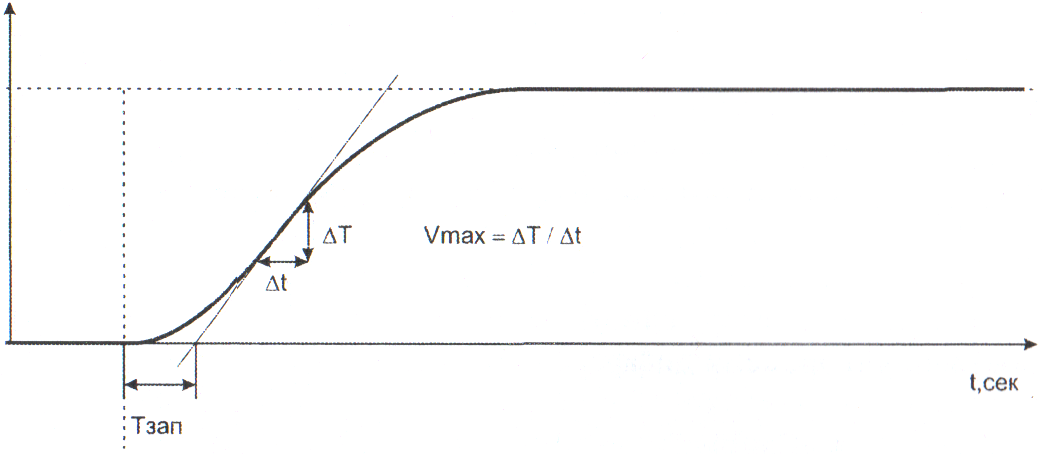
Рис. 4.3 - Результат вимірювання
Розрахуйте: - коефіцієнт пропорційності ПІД-регулятора по формулі Рг = 1,2 * Vmax * Тзап.; - Постійну часу інтегрування ПІД-регулятора по формулі In= 2,4 * Тзап; - Постійну часу диференціювання ПІД-регулятора по формулі Df = 0.4 * Тзап; Введіть отримані значення коефіцієнта пропорційності, часу інтегрування і часу диференціювання. Переведіть прилад в режим автоматичного керування клапаном. Переконайтеся, що регулятор виходить на задане значення параметра за 3 - 4 коливання і в сталому режимі коливання параметра відповідають заданій зон нечутливості регулятора. Якщо після введення параметрів ПІД при виході на задане значення коливання не загасають, збільшуйте коефіцієнт пропорційності на величину перельоту в градусах. Якщо при виході на задане значення коливання загасають занадто повільно, збільшуйте коефіцієнт постійну часу інтегрування. Якщо регулятор занадто повільно реагує на зовнішні обурення, збільште постійну часу диференціювання.