

Министерство образования Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
“Тюменский государственный нефтегазовый университет”
Институт нефти и газа
Методические указания и задания к практическим
занятиям по “Теории автоматического управления”
на тему “ Метод припасовывания граничных условий” для студентов специальностей АТП и УИТС очной и заочной форм обучения
Тюмень 2004
Утверждено редакционно-издательским отделом Тюменского государственного нефтегазового университета
Составители: к.т.н., доцент Макарова Л.Н., к.т.н. Макаров А.В.,
аспирант Фомин В.В.
Ответственный редактор: к.т.н., доцент Макарова Л.Н.
@ Государственное образовательное учреждение высшего
профессионального образования “Тюменский государственный
нефтегазовый университет”
Тюмень 2004
Министерство образования Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
“Тюменский государственный нефтегазовый университет”
Институт нефти и газа
Методические указания и задания к практическим
занятиям по “Теории автоматического управления”
на тему “ Метод припасовывания граничных условий” для студентов специальностей АТП и УИТС очной и заочной форм обучения
Председатель РИС Проректор
Перевощиков С.И. “ ” 200 г.
Рассмотрено на заседании
Подписи авторов Ученого совета ИНиГ
Протокол № от 200 г.
Подпись
Председатель совета
Рассмотрено на заседании
методической комиссии
Протокол № от 200 г
Подпись

Председатель метод. комиссии
Тюмень 2004
1. Основные определения
Метод “припасовывания” граничных условий представляет собой точный метод расчета в кусочно-линейных системах. Для каждого из линейных интервалов записывают решение уравнения с неизвестными произвольными постоянными, которые находят последовательно. Для этого значения координат и их производных в конце предыдущего и начале последующего интервала приравнивают. Это возможно в том случае, если координаты и их производные не совершают скачков.
2. Примеры построения фазовой траектории методом “припасовывания” граничных условий
2.1.
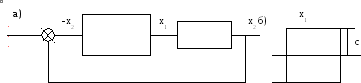
Исследовать переходный процесс в
системе со структурной схемой, приведенной
на (Рис.1). Значения характеристик равны:
к=2с; b=0,5;
с=5.
х2
-b
b

Error: Reference source not found
Рис.1. Структурная схема исследуемой системы
Решение. Дифференциальное уравнение замкнутой системы имеет вид:
 +kF(
+kF( )=0
)=0

+C , для х2>+b;
–b<x2<b при x1>0
F(x2)=
–C , для x2<-b;
–b<x2<b при x1>0
Запишем дифференциальное уравнение для каждого из линейных интервалов:
Для
F(x2)=с
 +kc=0
(1)
+kc=0
(1)
Для
F(x2)=
–c
 +kc=10
(2)
+kc=10
(2)
Решение для (1)
dx2/dt= –10 => dx2= –10dt
x2= –10t+c1; (3)
для (2) x2=10t+c2 (4)
Для (3) начальные условия имеют вид х2(0) , тогда с11=х2(0), т.е. с учетом начальных условий решение (3) имеет вид:
х2(t)= –10t+x2(0)
Найдём момент перехода к решению (4).
Это происходит, когда x2(t)= –b, т.е.
b= –10t+x2(0) => t1=(x2(0)+b)/10,
при этом x2=10t+c2 ( из (4)) равно –b, из этого условия находим с21.

c2= –(2b+x2(0)), т.е.
решение во второй области, начиная от момента времени t1, имеет вид
x2(t)=10t–(2b–x2(0)).
Следующий момент перехода к решению (3) наступит, когда x2(t)=b;
–b=10t–(2b–x2(0))
 ;
находим с12:
;
находим с12:
с12=2b+x2(0)
x2(t)= –10t+(2b+x2(0)),
Находим следующий момент времени, соответствующий х2(t)= –b и соответствующую постоянную времени и т.д.
2.2. Методом “припасовывания” граничных условий провести исследование переходных процессов на фазовой плоскости для нелинейной системы, приведенной на (Рис.2)

Error: Reference source not found
Рис.2. Структурная схема нелинейной системы к примеру 2.2
Нелинейный элемент представляет собой чувствительный элемент со статической характеристикой в виде релейной характеристики с зоной нечувствительности (Рис.1б).
Исполнительное устройство имеет передаточную функцию вида
 (5)
(5)
Передаточная функция объекта регулирования равна
 (6)
(6)
Заметим, что k=k1k2
Тогда линейная часть системы будет описываться уравнением
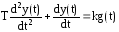 (7)
(7)
Уравнение нелинейного элемента
g(t)=F[ε(t)], (8)
Запишем уравнение сравнивающего элемента
ε(t)=x(t) – y(t). (9)
Предположим, что задающее воздействие x(t)=0. Тогда уравнение нелинейной САУ будет иметь следующий вид
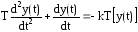 (10)
(10)
Характеристика нелинейного элемента разбивается на три линейных участка и для каждого из них составляется линейное дифференциальное уравнение:
Ι
уч.
 , еслиy
> b,
(11)
, еслиy
> b,
(11)
ΙΙ
уч.
 ,
если |y|
≤ b,
(11)
,
если |y|
≤ b,
(11)
ΙΙΙ
уч.
 ,
еслиy
< –b,
(11)
,
еслиy
< –b,
(11)
Для фазовой плоскости введем обычные координаты y и z =dy/dt.
Исключим в уравнениях (11) время
 ;
;
 ;
;
 ;
;
Разделяя переменные и интегрируя, получим уравнения фазовых траекторий для участков 1-3 нелинейной характеристики:
Ι
уч.
 , (12)
, (12)
ΙΙ
уч.
 , (12)
, (12)
ΙΙΙ
уч.
 ,
(12)
,
(12)
 –произвольные
постоянные интегрирования , определяемые
начальными условиями.
–произвольные
постоянные интегрирования , определяемые
начальными условиями.
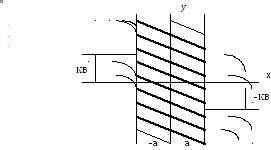
Сначала на фазовой плоскости наносят линии переключения, разделяющие плоскость на три области. Это линии перехода от одного участка нелинейной характеристики к другой.
Error: Reference source not found
Рис.3. Фазовые траектории
Затем по уравнению (12) строят фазовые траектории. При этом должны учитываться общие правила построения фазовых траекторий.
Построение фазовых траекторий в пакете “MATHCAD 2000”
В программе MATHCAD 2000 процесс построения фазовых траекторий производится следующим образом:
Зададим значения коэффициентов
|
|
|
|
|
Зададим начальные значения для вектора y:

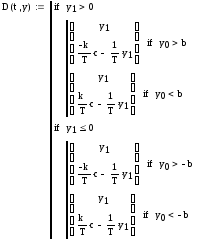
Определим функцию D по трем линейным участкам нелинейной статической характеристики, задающую производную, приведя дифференциальное уравнение второго порядка к системе двух дифференциальных уравнений первого порядка:
Найдем матрицу решения:

Построим
траекторию на фазовой плоскости,
предполагая, что первый столбец матрицы
решения
![]() содержит точки, в которых ищется решение
дифференциального уравнения, второй
содержит точки, в которых ищется решение
дифференциального уравнения, второй![]() — содержит значения найденного решения,
то есть y(t) и, наконец, третий столбец
— содержит значения найденного решения,
то есть y(t) и, наконец, третий столбец![]() содержит первые производные этого
решения, то есть dy(t)/dt.
содержит первые производные этого
решения, то есть dy(t)/dt.



b
–b
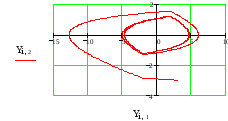
Рис.4. Фазовая траектория
На графике линии переключения — штриховые линии. Задавая различные начальные условия можно получить все возможные фазовые траектории исследуемой нелинейной системы.