5 Розробка системи контороля тиску, для мінімізації сили зажима ременя в варыаторы і попередження його просковзування
5.1 Обгрунтування необхідності системи контролю зажиму ременя
Провівши дослідження тягово-швидкісних властивостей і паливної економічності автомобіля з варіатором, ми прийшли до висновку, що низька ефективність, головним чином, викликана втратами в гідравлічній системі управління зрушенням-розсовуванням шківів у варіаторі. Щоб запобігти просковзуванню, сили зажиму ременя в сучасному CVT, зазвичай, набагато вищі (як правило на 30% або і більше), ніж необхідно для нормального функціонування. Висока сила зажиму приводить до додаткових втрат і в гідравлічній і в механічній системі. Зменшенням сил зажиму, можно підвищити ефективність CVT. Проте, це збільшує ризик надмірного просковзування ременя, яке може пошкодити шківи. Тому, в CVT необхідна система, яка управлятиме тиском зажиму залежно від передаваного крутного моменту.
5.2 Виявлення факторів, які впливають на просковзування і ефективність CVT
У експериментах встановлено, що геометричне відношення, і сили затиску постійні, коефіцієнт тертя тоді залежить лише від просковзування в системі. Крива тертя може бути побудована з вимірів крутного моменту і просковзування. Випробувальні двигуни бурової установки поставляють максимальний крутний момент 298 Нм, з максимальною кутовою швидкістю 525 рад/с. Крутний момент виміряний, використовуючи HBM T20wn датчик моменту. Окрема гідравлічна одиниця використовується, щоб забезпечити необхідний потік і тиск для сил затиску. Рисунок 1 дає схематичний короткий огляд експериментальної установки.
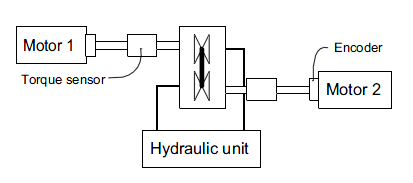
Рисунок. 1 – Схема експериментальної установки
Первинний і вторинний тиск протягом експериментів утримували константою Коефіцієнт тертя був виміряний при різних передаточних відношеннях, кутових швидкостях і при різному тиску. З рисунку 3 видно, що коефіцієнт тертя мало залежить від кутової швидкості, але залежить від передаточного відношення, як видно в рисунку 2.
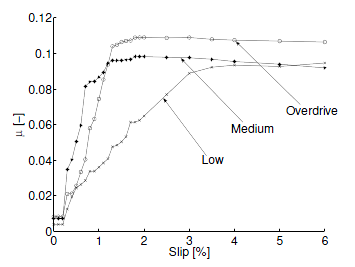
Рисунок. 2 – Залежність коефіцієнта тертя від передаточного відношення
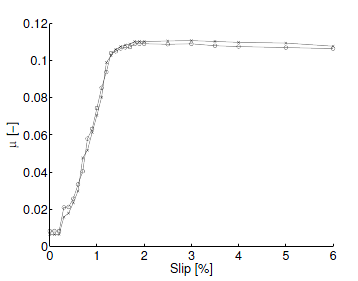
Рисунок. 3 – Залежність коефіцієнта тертя від кутової швидкості
 Черезмірне
збільшення сили затиску також викликає
більше просковзування (рис. 4). Це викликано
збільшенням напруженості в групах і
тому збільшення довжини поясу. Через
що збільшуються зазори між пластинками
ременя
Черезмірне
збільшення сили затиску також викликає
більше просковзування (рис. 4). Це викликано
збільшенням напруженості в групах і
тому збільшення довжини поясу. Через
що збільшуються зазори між пластинками
ременя
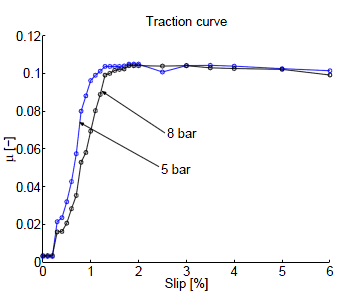
Рисунок. 4 – Вплив сили зажиму на просковзування
Ефективність залежить від сили зажиму і від передаточного відношення. З рисунку 5 може бути відмічено, що збільшення тиску викликає зменшення ефективності. Цей ефект викликаний внутрішнім тертям в ремені.
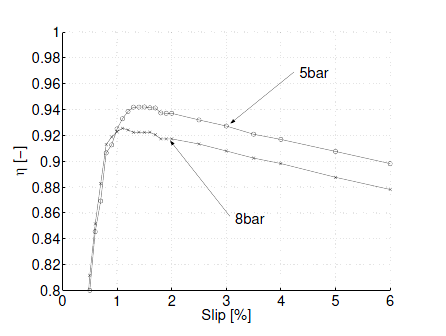
Рисунок. 5 – Залежність ефективності від сили зажиму
Просковзування також має сильну залежність від передаточного відношення (рис.6). Ефективність ясно вище при прямій передачі (передаточне відношення 1), ніж при максимальному або мінімальному передаточному відношенні.

Рисунок. 6 – Залежність ефективності від передаточного відношення
Просковзування залежний від зазору в ремені. Експеримент був здійснений з поясом із збільшеним зазором. Один блок був видалений з ременя. Тобто сумарний зазор в ремені був 1.8mm., в інших експериментах він становив всього 0.3mm. Істотна різниця була виявлена при максимальному передаточному відношенні.
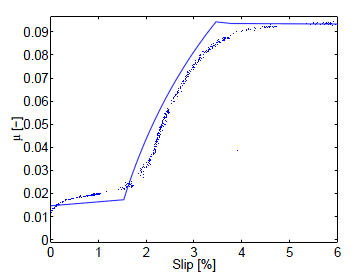
Рисунок. 7 – Залежність ефективності від передаточного відношення
Проаналізувавши виконані дослідження можно прийти до висновку, що на ефективність CVT в більшій мірі впливає сила зажима ременя. Більшість поточних стратегій сили зажиму розроблено, щоб завжди тримати значення просковзування в області мікропросковзування, для запобігання пошкодженню ременя і шківів. Це досягнуто, застосовуючи силу зажиму, яка вища, за необхідну, щоб передати крутний момент двигуна який заснований на даних від Engine Control Module (ECM). Щоб упевнитися, що піки крутного моменту не викликатимуть надмірного просковзування, ця сила затиску помножена на запас міцності, який приймають рівним 1,3. Оскільки, крутний момент двигуна, зазвичай, відносно низький, при звичайній роботі, сили зажиму дуже високі більшу частину часу. Це сприяє зниженню ефективності сучасної CVT. Використовуючи контроль просковзування, силами зажиму можно активно управляти, тобто підтримувати величину просковзування на одному рівнімі, при максимальному коефіцієнті тяги. Це означає, що просковзуванням управляють в області переходу мікро - макропросковзування.
 Збільшення
величини крутного моменту, приведе до
збільшення просковзування ременя, але
швидко регулюючи силу зажиму, просковзування
не досягатиме руйнівних значень і тому
пошкоджень можна уникнути.
Збільшення
величини крутного моменту, приведе до
збільшення просковзування ременя, але
швидко регулюючи силу зажиму, просковзування
не досягатиме руйнівних значень і тому
пошкоджень можна уникнути.
5.3 Динамічне моделювання системи контролю зажиму ременя
Щоб
проектувати систему контроля за
просковзування використовують динамічне
моделювання. Модель заснована на
динамічній моделі CVT (рис.8), Де,
![]() – крутний момент двигуна,
– крутний момент двигуна,![]() – момент інерції двигуна.
– момент інерції двигуна.![]() і
і![]() – крутний момент і момент інерції
трансмісії.
– крутний момент і момент інерції
трансмісії.

Рисунок. 8 – Динамічна модель CVT
У цій моделі геометричне відношення прийняте квазіпостійне. Це можливо, тому що у геометричного співвідношення динаміка на багато повільніша, ніж динаміка просковзування протягом нормальної роботи безступінчатої передачі:
 (3.1)
(3.1)
 (3.2)
(3.2)
З
квазіпостійним
![]() динаміка CVT може бути описана:
динаміка CVT може бути описана:
 (3.3)
(3.3)
 (3.4)
(3.4)
Об'єднавши формули визначаємо динаміку просковзування:
 (3.5)
(3.5)
Отримані рушійні сили для просковзування нелінійні. В цілях створення системи контроля, систему перетворюють в лінійну, довкола різних операційних пунктів. З лінійною моделлю буде визначено представлення простору станів системи. З цією метою коефіцієнт тяги узятий шматково лінійним, щоб описати область мікро - і область макропросковзування. Вказуючи на різні області індексом, коефіцієнт тяги може бути написаний як:
![]() (3.6)
(3.6)
При
визначенні простору станів як
![]() і
і![]() система може переходити в лінійну
довкола певного робочого пункту
система може переходити в лінійну
довкола певного робочого пункту![]() .
.
![]() (3.7)
(3.7)
де
–
![]() і
і![]() .
.
Лінійні матриці А і B можуть бути отримані:
 (3.8)
(3.8)
 (3.9)
(3.9)
де
 і
і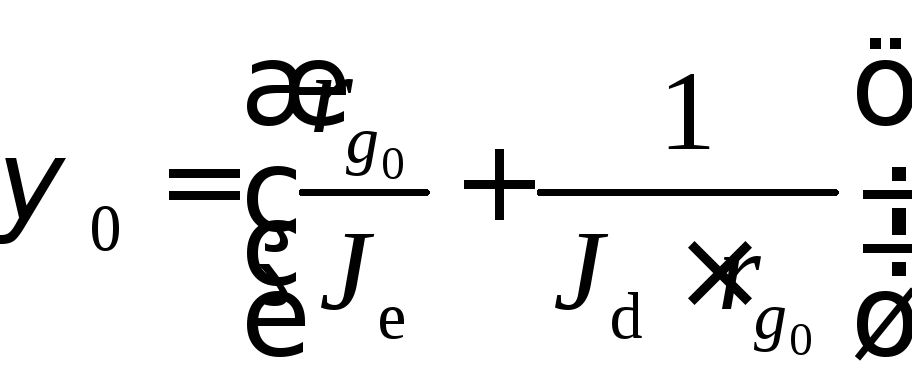 – вводяться для зручності написання.
Використовуючи отримані значення,
обчислюємо
– вводяться для зручності написання.
Використовуючи отримані значення,
обчислюємо![]() :
:
![]() (3.10)
(3.10)
Отримана
лінійна система використовуватиметься
для створення системи управління. В цій
моделі є 3 входи, але лише силою зажиму
![]() можна управляти на попередження. Вхідним
крутним моментом
можна управляти на попередження. Вхідним
крутним моментом![]() управляє водій через педаль дроселя,
момент трансмісії
управляє водій через педаль дроселя,
момент трансмісії![]() ,
визначений дорожніми умовами.
,
визначений дорожніми умовами.
Щоб розробити лінійний контролер було просчитано динаміку просковзування в багатьох робочих пунктах, і обчислино параметри контролера для кожного робочого пункту. Запропонований контролер PI (рис. 9). В якому просковзування використовується, щоб визначити, чи система знаходиться в області мікро - або області макропросковзування.

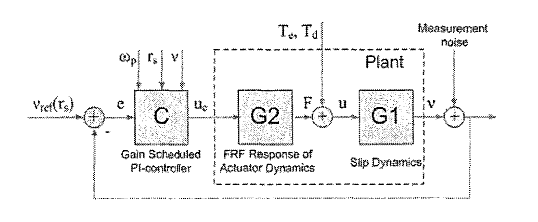
Рисунок. 9 – Контролер просковзування
Щоб забезпечити успішне функціонування контроллера, необхідно визначити крутний момент, який буде переданий. Крутний момент, оцінений, використовуючи обороти і положення дроселя. Контроллер просковзування випробуваний на експериментальній буровій установці (рис. 10). Це зроблено, щоб виконати реалістичні експерименти, використовуючи двигун внутрішнього згорання як джерело енергії, махове колесо, дискове гальмо – щоб моделювати дорожні навантаження. Крутні моменти, на вході і виході передачі виміряні, використовуючи системи телеметрії. Jatco Ck2 можна управляти з Transmission Control Module (TCM), який використовується в автомобілі або з розробленим диспетчером просковзування. Це дуже корисно для порівняння ефективності.
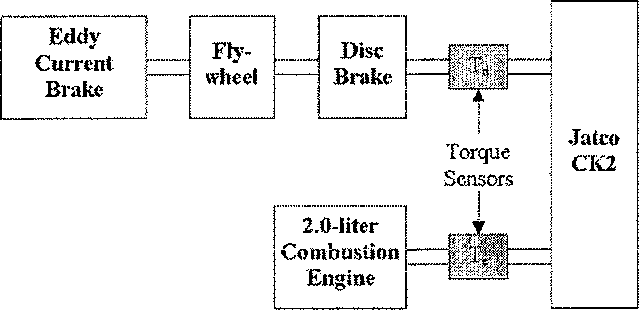
Рисунок. 10 – Схема експериментальної установки
Просковзування
не виміряне безпосередньо, а обчислене
від інших сигналів. Кутові швидкості
CVT вимірюють, щоб визначити відношення
![]() .
Система досить точна, щоб виявити
просковзування 0.1%, що має бути достатнім,
щоб контроллер просковзування працював.
.
Система досить точна, щоб виявити
просковзування 0.1%, що має бути достатнім,
щоб контроллер просковзування працював.
5.4 Дослідження ефективності створеної системи
Контроль просковзування створений, щоб підвищити ефективність CVT, тому виміри ефективності виконані, щоб покати різницю між ефективністю при використанні TCM з ефективністю при використанні контролера просковзування. Значення просковзування змінюється між 0.5% для відношення 2.25 і 1.5% для відношення 0.43 Це означає, що эфектитвнысть Ck2, підвищена (рис. 11).
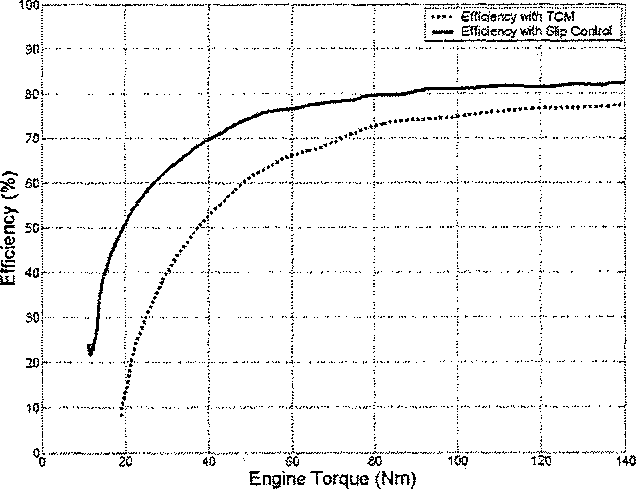
Рисунок. 11 – Ефективність CVT
З рисунку 11 видно, що підвищення ефективності при використанні контролера просковзування досить істотне, особливо при невеликому крутному моментові. Для передаточного відношення 1.4, поліпшення ефективності трохи нижче, ніж для меншого передаточного відношення, але все ще в межах від 10 до 5%. Для передаточного відношення більшого за 1.4, ефективності зменшується. Це викликано мінімальним рівнем тиску в Ck2 – 0.66 МПа, що приводить до мінімальної сили зажиму, майже 10 кН.
Контроль просковзування значно збільшує ефективність CVT. Наступний крок, це експеримент, з різкими скачками крутного моменту (рис. 12). В цих тестах буде встановлюватись, чи відбувається просковзуваня і чи ушкоджує це ремінь і шківи. Промахом управляли в тих же самих умовах, які використовувалися для вимірів ефективності. Скачки крутного моменту, були створені за допомогою гальма.
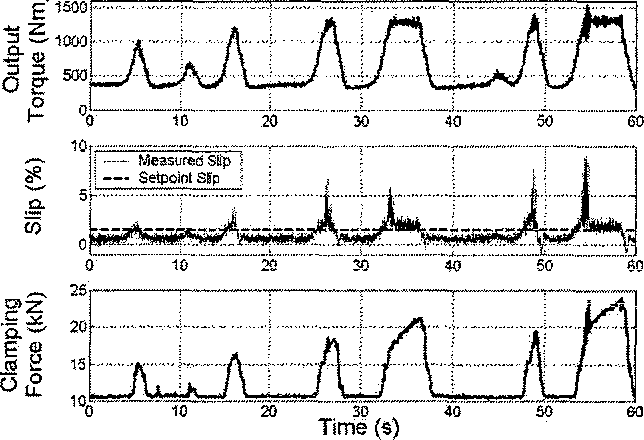
Рисунок. 12 – Скачки крутного моменту
Дані показують, що коли крутний момент досягає максимуму відбувається просковзування, але замість того, щоб досягти руйнівних рівнів, просковзування швидко зменшується до безпечного значення завдяки контролеру. Візуальний огляд, також показав, що ремінь не був пошкоджений після таких тестів. Це значить, що короткочастні скачки крутного моменту, не завдають збитку ременю і створений контроле дозволяє підвищити ефективність безступінчастої трансмісії.

СПИСОК ЛІТЕРАТУРИ
Говорущенко Н.Я., Туренко А.Н. Системотехника транспорта (на примере автомобильного транспорта). - Харьков: РИО ХГАДТУ, 1998. – 474 с.
Говорущенко Н.Я. Техническая эксплуатация автомобилей. - Харьков: Вища школа. Изд-во при Харьк. ун-те, 1984. – 312 с.
Інформаційний звіт по кафедрі ТЕСА за 2011-12 навчальний рік.
J. D. Micklem, D. K. Longmore and C. R. Burrows. The magnitude of the losses in the steel pushing V-belt continuously variable transmission. - Proc Instn Mech Engrs Vol. 210, Part D: Journal of Automobile Engineering, ImechE, 1996
B. Bonsen, T. W. G. L. Klaassen, K. G. O. van de Meerakker, M. Steinbuch and P. A. Veenhuizen. Analysis of slip in a continuously variable transmission. - Proceedings of IMECE'03, ASME International Mechanical Engineering Congress, Washington, 2003
D.Kobayashi, Y.Mabuchi, Y.Katoh, A study on the torque capacity of a metal pushing v-belt for cvt's. - SAE Technical papers, 1998.