

2.4 Построение в MatLab релейной схемы управления

Рисунок 2.2 – релейная схема управления электроприводом
Были подобраны резисторы R1=10 Ом, R2=5 Ом, R3=1 Ом.
Промоделировав полученную схему, мы получили:

Рисунок 2.3 – угловая скорость вращения ротора
Двигатель разгоняется до скорости 10 рад/сек за четыре этапа, время регулирования t=30.5с.
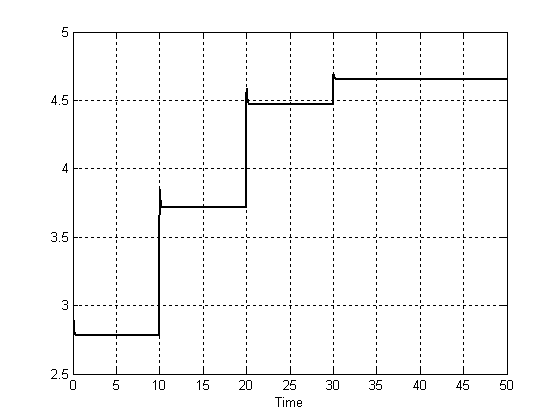
Рисунок 2.4 – ток якоря
Пусковой ток достигает значения 4.7 А .
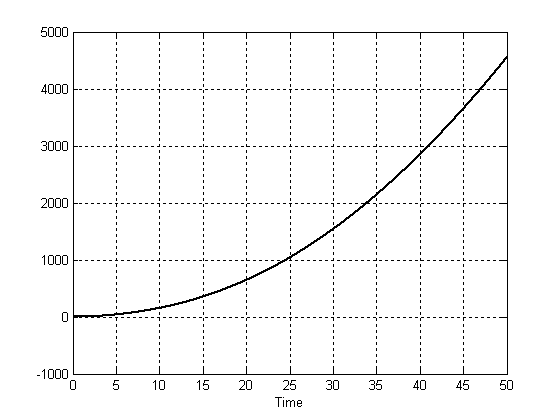
Рисунок 2.5 – график переходного процесса электропривода

Рисунок 2.6 – механическая характеристика ДПТ

Рисунок 2.7 – механическая характеристика электропривода
2.5 Построение в MatLab схемы управления с регулированием по скорости

Рисунок 2.8 – схема управления электроприводом по скорости
Промоделировав полученную схему, мы получили:
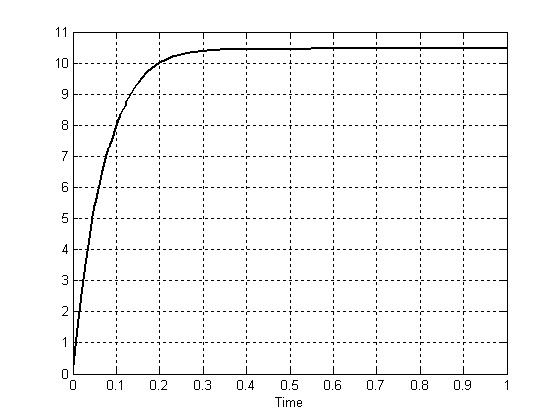
Рисунок 2.9 – угловая скорость вращения ротора
Двигатель разгоняется до скорости 10.54 рад/сек. Время регулирования t=0.7с.
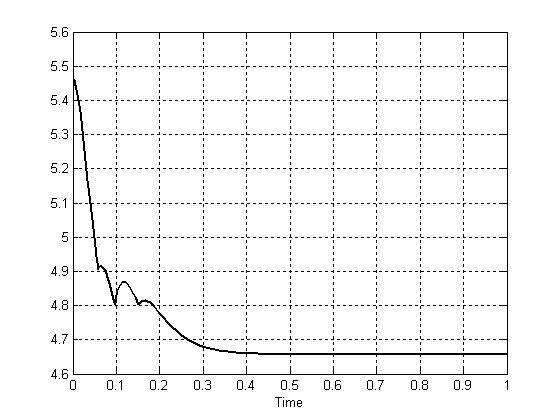
Рисунок 2.10 – ток якоря
Ток якоря достигает установившегося значения 5.46 А

Рисунок 2.11 – график переходного процесса электропривода.

Рисунок 2.12 – механическая характеристика ДПТ
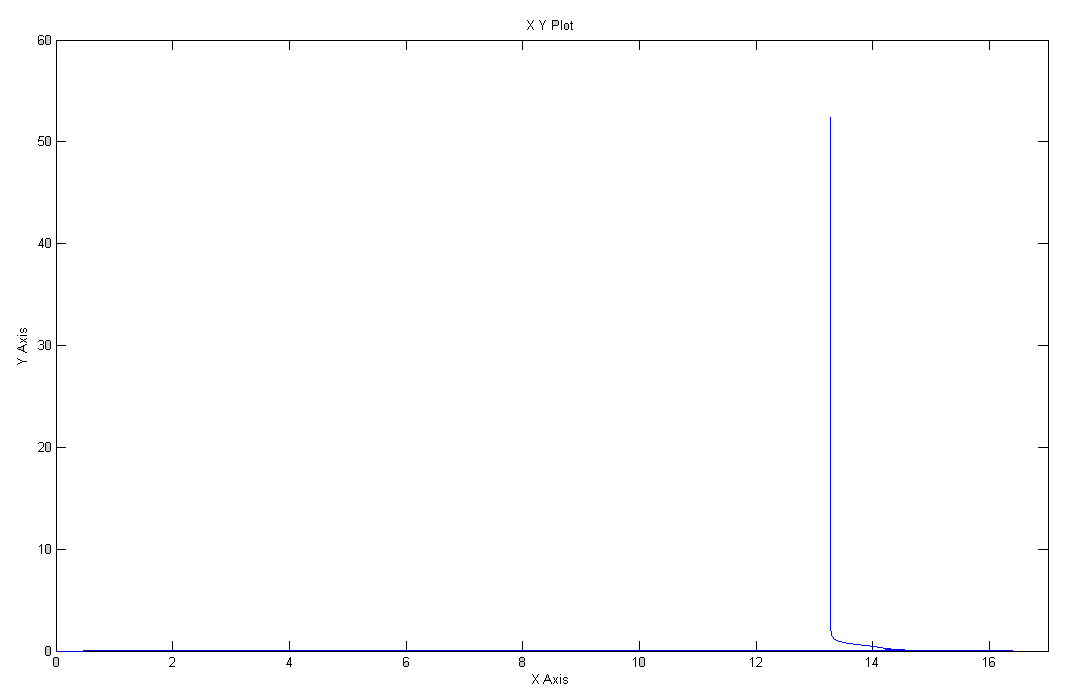
Рисунок 2.13 – механическая характеристика электропривода
2.6 Построение в MatLab схемы управления с пд-регулятором

Рисунок 2.14 – схема управления электроприводом при помощи ПД-регулятора
Промоделировав полученную схему, мы получили:

Рисунок 2.15 – угловая скорость вращения ротора
Двигатель с ПД-регулятором разгоняется до скорости 9·10-3 рад/сек за 1.5 секунды.

Рисунок 2.16 – ток якоря
Значение тока якоря составляет 0.45 А.
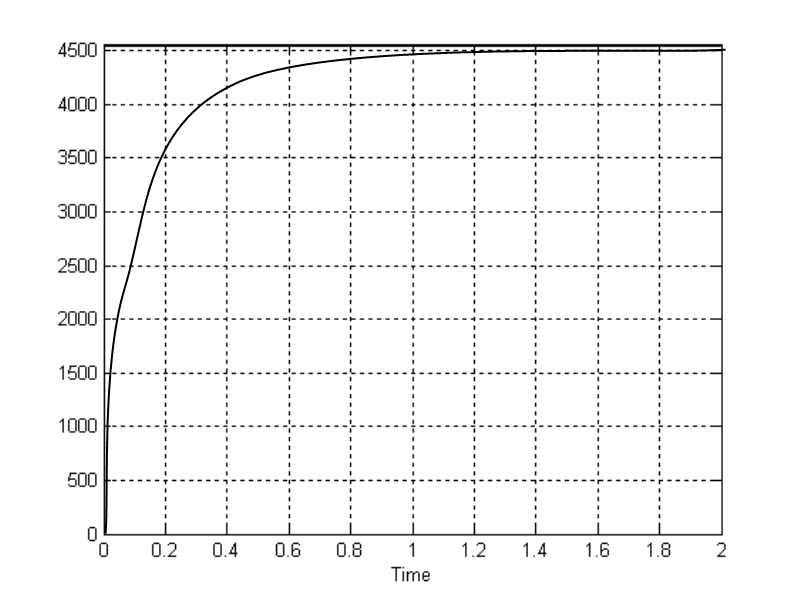
Рисунок 2.17 – график переходного процесса электропривода
Переходный процесс достигает установившегося режима за 25 секунд.

Рисунок 2.18 – механическая характеристика ДПТ

Рисунок 2.19 – механическая характеристика электропривода
2.7 Сравнительный анализ разработанных систем управления
|
Критерий |
Релейная система |
Регулирование по скорости |
ПД-регулятор |
|
Скорость вращения ротора, С-1 |
10 |
10 |
9·10-3 |
|
Ток якоря, А |
4.7 |
5.46 |
0.45 |
|
Время регулирования, с |
30.5 |
0.5 |
1.5 |
Для выбора наиболее оптимальной схемы мы должны сравнить все параметры и определить наиболее подходящую. Так, например, пусковые токи в первой и второй схемах примерно равны – 4.7 А и 5.46 А соответственно, а в третьей схеме он равен 0.45 А, хотя мы поставили для уменьшения пускового тока звено нечувствительности, но уменьшать ток еще больше не рационально.
Проанализировав все результаты, я решил, что схема пуска двигателя по скорости является наиболее оптимальной, для нашей системы. Хотя она и обладает относительно большим пусковым током 5.46 А, зато в ней самое маленькое время регулирования 0.5 с.
Выводы
В данном курсовом проекте я разработал систему автоматического управления электроприводом точного позиционирования скользящей части стола металлообрабатывающего станка с двигателем постоянного тока. Были разработано три системы управления: релейная система, система регулирования по скорости и система регулирования с ПД-регулятором. Также были построены в среде Simulink имитационные модели для каждой из систем. После моделирования я получил графики выходных характеристик электропривода и по этим данным сделал анализ систем и выбрал лучшую.
Для регулирования электропривода наиболее выгодно использовать регулирование по скорости, так как этот вид регулирования обладает самыми оптимальными для нашей системы характеристиками.
Список использованных источников и литературы
-
Дементьев Ю.Н., Чернышев А.Ю., Чернышев И.А. «Автоматизированный электропривод: Учебное пособие» – Томск: Изд-во ТПУ, 2009. – 224 с.
-
http://freepapers.ru
-
http://energo20.ru
-
О. О. Осьмачко «Лабораторный практикум по дисциплине «Автоматизированный электропривод» - Харьков: ХНАДУ, 2008.-40 с.
-
Конспект лекций по дисциплине «Автоматизированный электропривод».
