

Посадочный радиолокатор
ПРЛ представляет собой РЛС СМВ диапазона волн и предназначен для опреде-
|
ления отклонений самолёта, совершающего посадку, от заданных посадочного кур- |
|
са и глиссады. |
|
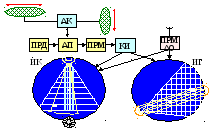
ПРЛ имеет два отдельных канала: курса и глиссады, каждый из которых име- |
|
ет свою антенну и индикатор. Передатчик и приёмник являются общими для обо- |
|
их каналов, что требует разделения во времени их (каналов) работы. Эта задача |
|
решается с помощью антенного коммутатора (АК) и коммутатора индикаторов. |
|
ПРЛ может работать в режимах: |
|
- пассивном; |
|
- активном (совместно с ПРМ АО). |
Посадочный
радиолокатор РСП.
КАНАЛ КУРСА обеспечивает контроль за положением самолёта в пространстве
|
относительно посадочного курса. Антенна канала «К» установлена под углом, рав- |
|
ным заданному углу снижения самолёта относительно горизонта и качается в го- |
|
ризонтальной плоскости с частотой 12 Гц. |
|
На индикаторе курса (ИК) информация отображается в координатах «Аз-Дн». |
|
Горизонтальные засвеченные линии на индикаторе являются масштабными мет- |
|
ками дальности, которая отсчитывается от точки приземления. На ИК высвечи- |
|
ваются также вертикальная линия заданного посадочного курса и наклонные ли- |
|
нии, соответствующие сектору обзора радиолокатора по азимуту. Над экраном |
|
ИК расположена подвижная прозрачная визирная линейка, указывающая ширину и |
|
направление по азимуту ДН антенны канала «Г». Если метка самолёта на ИК на- |
|
ходится за пределами внутреннего выреза линейки, то этот самолёт находится за |
|
пределами ДН антенны канала «Г», и на индикаторе ИГ его метка наблюдаться |
|
не будет. С помощью ручки можно поворачивать линейку и совмещать её внутрен- |
|
ний вырез с меткой самолёта. При этом синхронно развернётся антенна канала |
|
«Г», и самолёт попадёт в пределы её ДН, благодаря чему метка самолёта будет |
|
наблюдаться на ИГ. Для отсчёта бокового отклонения самолёта от посадочного |
|
курса на вспомогательном трафарете ИК нанесены вертикальные линии, парал- |
|
лельные линии заданного курса. |
КАНАЛ ГЛИССАДЫ обеспечивает контроль за положением самолёта в простран-
|
стве относительно заданной глиссады планирования. Антенна канала «Г» сканиру- |
|
ет пространство в вертикальной плоскости с частотой 12 Гц. Биссектрису угла |
|
сканирования можно перемещать как по азимуту, так и по углу места. |
|
На индикаторе глиссады (ИГ) информация отображается в координатах «Дн-Н». |
|
Отсчёт осуществляется: |
|
Дн – по вертикальным масштабным меткам дальности от точки приземления; |
|
Н – по горизонтальным масштабным меткам высоты. |
|
Контроль за выдерживанием самолётом заданной глиссады осуществляется с по- |
|
мощью прозрачной визирной линейки с нанесёнными продольными линиями, угол на- |
|
клона которой соответствует заданному углу планирования. |
ДОСТОИСТВА РСП: НЕДОСТАТКИ РСП:
Не требует установки на борту са- Подверженность помехам и невысокая
|
лёта дополнительного оборудования. |
|
точность определения Н полёта само- |
|
|
лёта на последнем участке снижения. |
ЗАНЯТИЕ 4 « РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ АКТИВНОГО ОТВЕТА »