

импульсов, ЭК (РИ) – электронный коммутатор (распределитель импульсов), УМ – выходной усилитель мощности. Иногда БУ выполняется без ЭК, а входные импульсы fвх с требуемым фазовым сдвигом поступают по нескольким каналам. БУ питается от сети постоянного тока и выполняет функции статического ПЧ.
Разомкнутая система непосредственно реагирует на импульсные команды, причем информационная характеристика сигнала определяется только частотой и числом импульсных посылок. Изменение в определенных пределах амплитуды и формы импульсов не нарушает нормальной работы. Частота вращения и суммарный угол поворота вала двигателя пропорциональны соответственно частоте и числу поданных импульсов. При отсутствии сигнала (нулевая частота) коммутация фаз прекращается, поле в рабочем зазоре двигателя останавливается, а ШД развивает значительный статический синхронизирующий момент. Это позволяет системе фиксировать, т.е. запоминать конечные координаты любых перемещений.
Системы электропривода с вентильным двигателем
ЭМ, функционально объединенные управляемыми полупроводниковыми коммутаторами, называются вентильными двигателями (ВД).
Для понимания физических процессов в вентильном двигателе вспомним принцип действия и основные особенности работы ДПТ. В обычных ДПТ по окружности якоря расположен ряд секций (катушек), которые соединены между собой и образуют замкнутую обмотку. Неподвижные полюсы создают магнитное поле, в котором вращается якорь. Ток к якорю подводится через щетки и коллектор, поэтому магнитное поле якоря направлено вдоль оси щеток. Момент двигателя создается за счет того, что поле якоря стремится занять положение, соосное с полем возбуждения. Машина развивает наибольший момент, когда векторы указанных полей направлены под углом 90° друг к другу. Наличие коллектора с большим числом пластин обеспечивает неизменное направление потока якоря, который, взаимодействуя с потоком возбуждения, создает постоянный момент.
ВДПТ каждое ответвление обмотки якоря присоединено к одной из пластин коллектора. Когда пластина находится под щеткой, соответствующее ответвление обмотки подключается к положительному или отрицательному выводу источника питания.
ВВД могут применяться обычные якорные обмотки ДПТ, а работу многопластинчатого механического коллектора воспроизводят статические коммутаторы [4].
Для коммутации таких двигателей в зависимости от мощности используются тиристоры или транзисторы. ВД могут работать как бесконтактные ДПТ, если магнитный поток создается обмоткой возбуждения, питающейся постоянным током, а тиристоры или транзисторы управляются в функции положения ротора.
87

Обмотка якоря, управляемая статическим коммутатором, создает в воздушном зазоре магнитное поле, которое вращается с синхронной частотой по отношению к якорю, как в обычном многофазном двигателе переменного тока. Для того чтобы в статическом коммутаторе произвести операции, аналогичные тем, которые производятся на коллекторе, необходимо вместо каждой пластины иметь одну пару тиристоров. Один из них обеспечивает протекание тока от шины с положительной полярностью к соответствующему ответвлению обмотки; а второй — от этого ответвления к шине, имеющей отрицательную полярность. Механический коммутатор автоматически осуществляет переключение секций в требуемом положении ротора, в то время как коммутация тиристоров должна контролироваться датчиком положения вала ротора. В этом случае частота коммутации пропорциональна частоте вращения ротора.
При замене механического коммутатора статическим устройством число переключений уменьшают с целью ограничения числа тиристоров и лучшего их использования. На рис. 2.2.1.48,а показаны кольцевая обмотка и простейший коллектор из трех пластин.
Рис. 2.2.1.48. Электрическая машина постоянного тока с тремя пластинами коллектора: а — конструкция; б — напряжение между щетками
Эквивалентная полупроводниковая схема приведена на рис. 2.2.1.49,а. В этой схеме каждое из трех ответвлений якорной обмотки подключается с помощью двух тиристоров к шинам с положительной и отрицательной полярностями, в результате чего получается схема трехфазного моста. Графики на рис. 2.2.1.48,б и 2.2.1.49,б справедливы при синусоидальном изменении во времени ЭДС отдельных секций обмотки. Формы кривых напряжений на обоих рисунках одинаковы.
При анализе работы механического коммутатора принято, что ось щеток смещена относительно нейтрали на угол δ, и учтена ширина щеток, которой соответствует угол θ. На рис. 2.2.1.49,б показана форма напряжения для трехфазной мостовой схемы, работающей в инверторном режиме с уг-
88
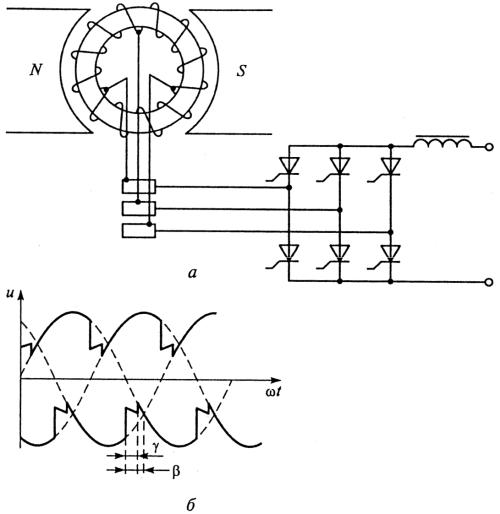
лом сбережения β, обеспечивающим необходимый запас на коммутацию (угол γ) и восстановление запирающих свойств тиристоров.
В обычных ДПТ коллектор содержит большое число пластин, так как допустимое напряжение между пластинами ограничено из условий диэлектрической прочности изолирующих прокладок. В статическом коммутаторе таких ограничений нет, и удовлетворительный режим работы достигается при небольшом числе коммутаций за один оборот ротора. Коллектор ДПТ располагают на роторе для того, чтобы не иметь вращающихся щеток, однако при наличии статического коммутатора двигатель может иметь обращенную конструкцию.
На роторе обращенного двигателя расположены обмотка возбуждения и два контактных кольца, а кольца, показанные на рис. 2.2.1.49,а, в этом случае не нужны. Если затем кольцевую обмотку заменить трехфазной, то конструкция машины оказывается такой же, как у обычного трехфазного СД.
Рис. 2.2.1.49. Электрическая машина со статическим коммутатором в виде тиристорного моста: а — принципиальная схема; б — напряжение в цепи выпрямленного тока моста
89

Питающийся от мостового инвертора трехфазный СД подобен ДПТ. Наибольшее применение нашли ВД с трехфазной обмоткой якоря. На рис. 2.2.1.50 показана принципиальная схема трехфазного синхронного ВД, получающего питание от сети переменного тока через промежуточное звено постоянного тока — управляемый тиристорный выпрямитель В.
Рис. 2.2.1.50. Схема бесконтактного вентильного двигателя
Ротор ВД двухполюсный с постоянными магнитами или электромагнитной системой возбуждения. На роторе закреплен датчик положения ро-
90
тора ДПР, который через систему управления СУ обеспечивает управление инвертором И.
Дроссель с индуктивностью Ld поддерживает неизменным значение первичного тока Id.
Использование датчика положения ротора является особенностью вентильного двигателя, так как сигналы на переключение тиристоров инвертора поступают от системы управления в зависимости от положения ротора, благодаря чему может изменяться частота тока в обмотке ротора. Если бы инвертор был независимым и частота инвертируемого тока поддерживалась неизменной, то рассматриваемая электромеханическая система инвертор — электрическая машина являлась бы обычным синхронным двигателем без регулирования частоты вращения.
Промежуточное звено постоянного тока разделяет частоты сети переменного тока и выхода инвертора, поэтому частота вращения двигателя не ограничивается частотой сети.
Для ВД небольшой мощности инвертор может быть создан на полностью управляемых элементах (транзисторах, двухоперационных тиристорах), а для ВД средней и большой мощности — на неполностью управляемых элементах (тиристорах, семисторах), а также на полностью управляе-
мых тиристорах (GTOs — gate turn off thyristors).
Внастоящее время в ВД применяются биполярные транзисторы с изолированным затвором IGBTs.
При вращении ротора ДПР через систему управления включает вентили инвертора и тем самым переключает токи в фазах обмотки якоря. На рис. 2.2.1.50 показаны соответствующие положения магнитного потока яко-
ря ФА, ФB, ФC для трех моментов времени t1, t2, t3. Ротор стремится повернуться так, чтобы его магнитный поток возбуждения ФB совпал с потоком обмотки фазы якоря. Когда оси потоков ротора и фазы якоря сближаются, ДПР дает сигнал на включение тока в следующей фазе, что вызывает дальнейший поворот ротора и т.д.
Инвертирование ВД осуществляется с помощью известных инверторных схем (см. часть 1 конспекта). Датчики положения ротора ВД представляют собой встроенный в двигатель узел, состоящий из чувствительных элементов, закрепленных на статоре, и сигнальных элементов, закрепленных на роторе.
Вотносительно мощных ВД наибольшее распространение получили индукционные датчики. Существуют ДПР на основе магнитодиодов и фотоэлементов. Если требуется глубокое регулирование частоты вращения двигателя, применяют ДПР типа бесконтактного сельсина. Такой ДПР фиксирует и частоту вращения двигателя.
Кроме ДПР, в вентильных двигателях могут использоваться: датчики, фиксирующие положение амплитуды полного магнитного потока (на базе датчиков Холла или индукционных элементов с насыщающейся магнитной
91