Расчетно-графическое задание № 1 кинематика точки Задача 1. Кинематика материальной точки на плоскости
Точка движется в плоскости оху.
Уравнение движения точки задано
координатами![]() ,
,![]() ,
гдех иувыражены в см,t– в с. Требуется:
,
гдех иувыражены в см,t– в с. Требуется:
записать уравнение траектории в явном виде
 ;
;построить траекторию;
определить положение точки в начальный момент времени (t0= 0c), направление движения точки, положение точки в момент времениt= 1c;
вычислить вектор скорости
 и вектор ускорения
и вектор ускорения точки в начальный момент времени и при t= 1c;
точки в начальный момент времени и при t= 1c;задать движение точки естественным способом;
геометрически и аналитически определить нормальную и касательную составляющие ускорения точки в начальный момент времени и при t= 1 с;
найти радиус кривизны в начальный момент времени и при t= 1c;
Функциональные зависимости
![]() ,
,![]() заданы в табл. 1 и 2 соответственно.
заданы в табл. 1 и 2 соответственно.
Для выполнения и защиты данной задачи необходимо усвоить материал пп. 1, 2 рабочей программы.
Таблица 1
|
№ варианта |
|
№ варианта |
|
|
1 |
|
16 |
|
|
2 |
|
17 |
|
|
3 |
|
18 |
|
|
4 |
|
19 |
|
|
5 |
|
20 |
|
|
6 |
|
21 |
|
|
7 |
|
22 |
|
|
8 |
|
23 |
|
|
9 |
|
24 |
|
|
10 |
|
25 |
|
|
11 |
|
26 |
|
|
12 |
|
27 |
|
|
13 |
|
28 |
|
|
14 |
|
29 |
|
|
15 |
|
30 |
|
Таблица 2
|
№ варианта |
| ||
|
|
|
| |
|
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
5 |
|
|
|
|
6 |
|
|
|
|
7 |
|
|
|
|
8 |
|
|
|
|
9 |
|
|
|
|
0 |
|
|
|
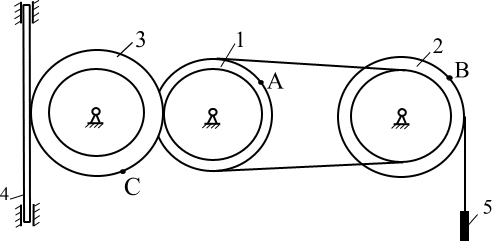
Задача 2. Определение кинематических характеристик точек при поступательном и вращательном движениях твердого тела
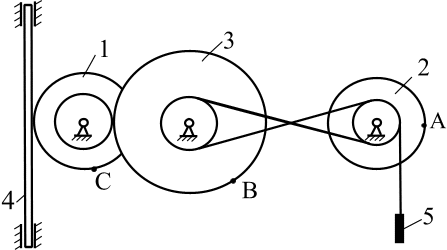
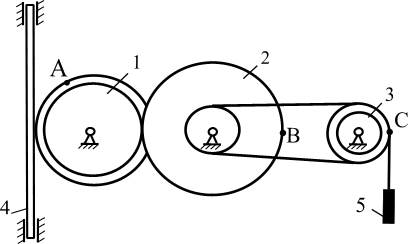
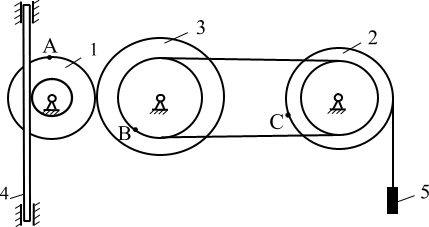
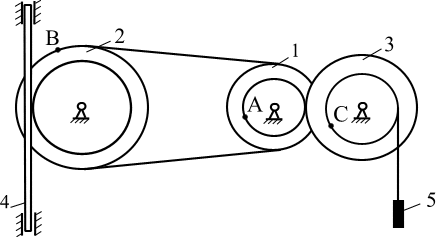
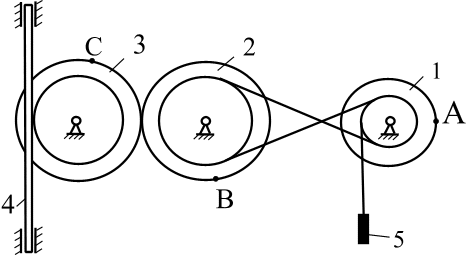
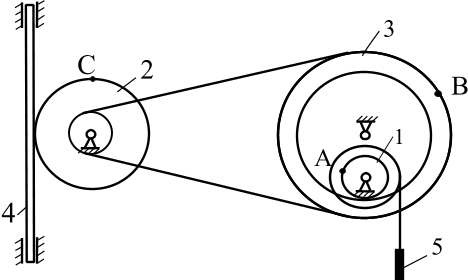
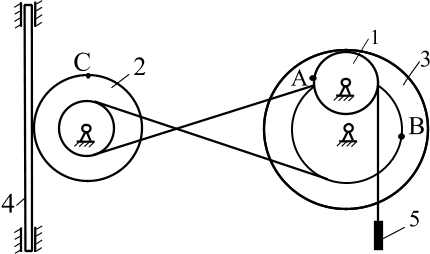
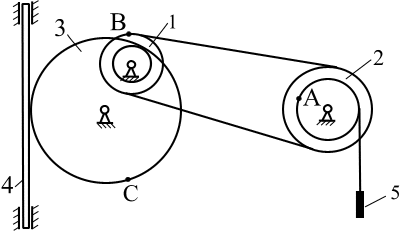
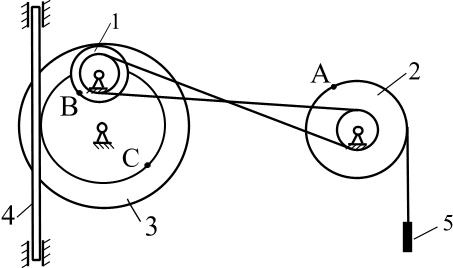
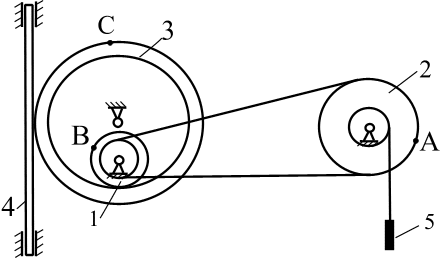
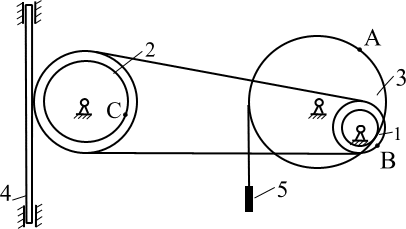
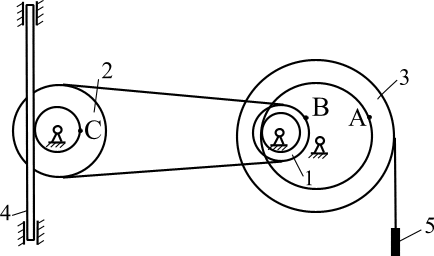
Механизм состоит из трех ступенчатых дисков (1 – 3), находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес. Радиусы ступенчатых дисков заданы.
На ободах колес расположены точки А,В,С. В стб. «Дано» табл. 3
Таблица 3
|
№ варианта |
Дано |
Найти | |
|
скорость |
ускорение | ||
|
1 |
|
С; В;3 |
аВ;1;2 |
|
2 |
|
В; С;1 |
аС;2;3 |
|
3 |
|
А; 2;3 |
аС;1;2 |
|
4 |
|
А; С;1 |
аС;2;3 |
|
5 |
|
5; В;3 |
аВ;1;2 |
|
6 |
|
4; 2;3 |
аА;1;2 |
|
7 |
|
4; 5;1 |
аС;2;3 |
|
8 |
|
А; С;2 |
аВ;1;3 |
|
9 |
|
В; С;1 |
аС;2;3 |
|
10 |
|
А; В;С |
аВ;1;3 |
|
11 |
|
А, С,3 |
аВ,1,2 |
|
12 |
|
С, 1,2 |
аА,1,3 |
Окончание табл. 3
|
№ варианта |
Дано |
Найти | |
|
скорость |
ускорение | ||
|
13 |
|
В, С,2 |
аС,1,3 |
|
14 |
|
С, В,2 |
аВ,1,3 |
|
15 |
|
А, В,1 |
аС,2,3 |
|
16 |
|
А, В,3 |
аС,1,2 |
|
17 |
|
А, С,1 |
аВ,2,3 |
|
18 |
|
А, С,2 |
аВ,1,3 |
|
19 |
|
В, С,2 |
аА,1,3 |
|
20 |
|
В, С,2 |
аА,1,3 |
|
21 |
|
А, В,1 |
аС,2,3 |
|
22 |
|
А, В,1 |
аС,2,3 |
|
23 |
|
С, В,2 |
аА,1,3 |
|
24 |
|
С, В,2 |
аА,1,3 |
|
25 |
|
А, В,2 |
аС,2,3 |
|
26 |
|
В, ,3 |
аА,1,3 |
|
27 |
|
, В,1 |
аС,2,3 |
|
28 |
|
, ,3 |
аВ,2,3 |
|
29 |
|
В, ,2 |
аС,2,3 |
|
30 |
|
, В,3 |
аА,1,3 |
указаны
уравнения движения
![]() ,
уравнения вращения
,
уравнения вращения![]() или уравнения изменения скорости
(угловой скорости) ведущего звена
механизма.
или уравнения изменения скорости
(угловой скорости) ведущего звена
механизма.
Для момента времени t1
= 2 (с) определить характеристики
движения указанные в стб. «Найти» (табл.
3): скорости (![]() - линейная,
- линейная,![]() - угловая) и ускорения (а - линейное,
- угловая) и ускорения (а - линейное,![]() - угловое). Расчетные схемы представлены
в табл. 4. Для выполнения и защиты данной
задачи необходимо усвоить материал пп.
3 - 5 рабочей программы.
- угловое). Расчетные схемы представлены
в табл. 4. Для выполнения и защиты данной
задачи необходимо усвоить материал пп.
3 - 5 рабочей программы.
Таблица 4
|
1.
|
R1 = 8 см; R2 = 16 см; R3 =4 см; r1 = 6 см; r2 = 3 см; r3 = 3 см
|
|
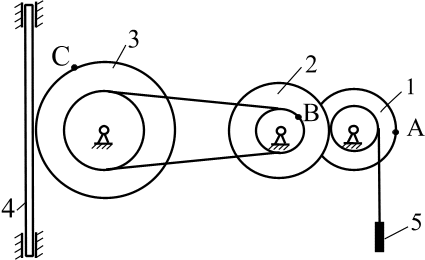
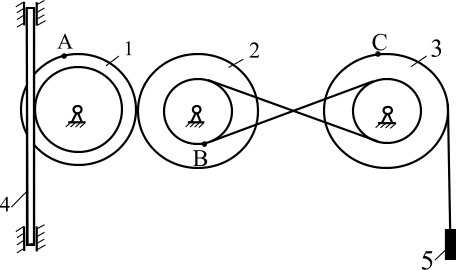
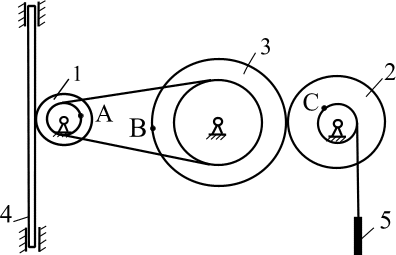
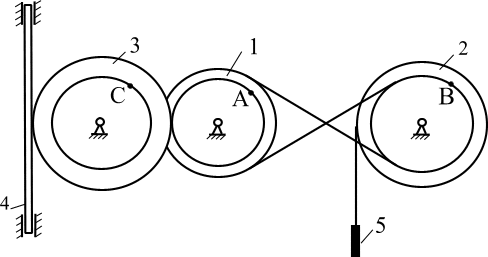
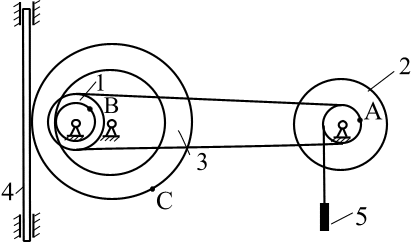
2.
|
R1 = 8 см; R2 = 16 см; R3 = 12 см; r1 = 6 см; r2 = 9 см; r3 = 9 см
|

Продолжение табл. 4
|
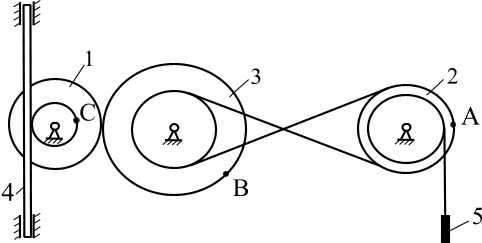
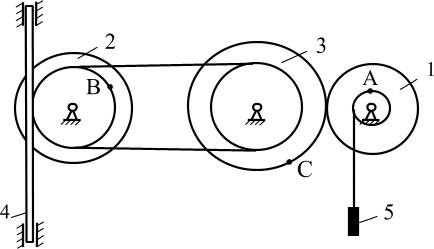
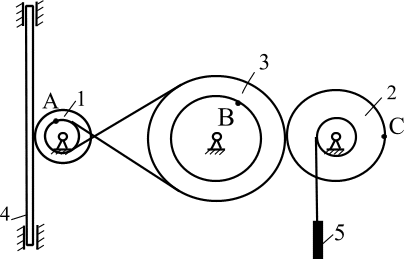
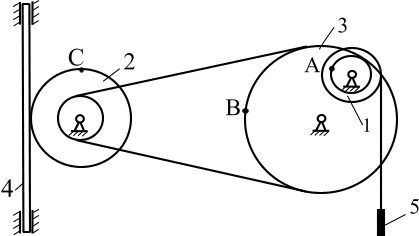
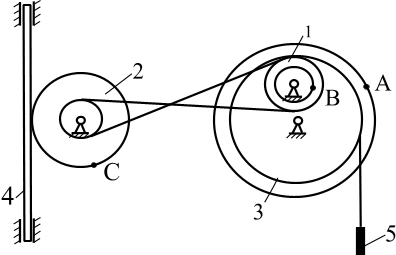
3.
|
R1= 4 см; R2= 8 см; R3= 12 см; r1= 2 см; r2= 6 см; r3= 6 см
| |
|
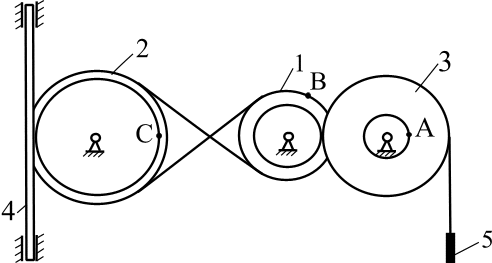
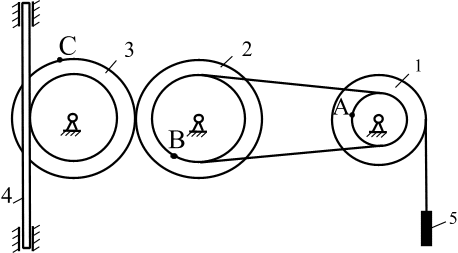
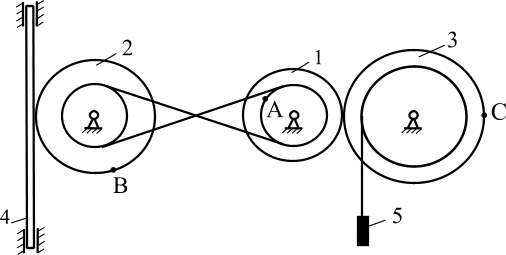
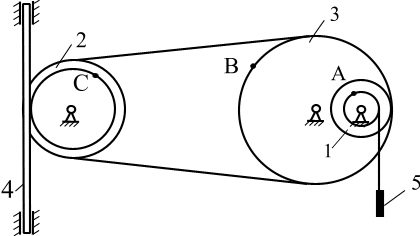
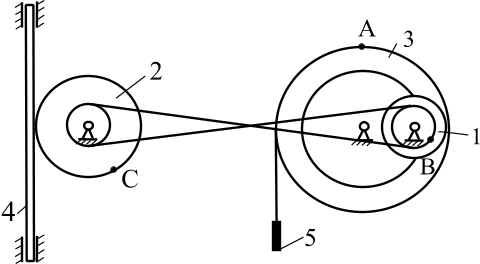
4.
|
R1= 6 см; R2= 16 см; R3= 18 см; r1= 3 см; r2= 14 см; r3= 10 см | |
|
5.
|
R1= 6 см; R2= 8 см; R3= 9 см; r1= 3 см; r2= 4 см; r3= 5 см | |
Продолжение табл. 4
|
6.
|
R1= 4 см; R2= 9 см; R3= 14 см; r1= 2 см; r2= 6 см; r3= 10 см | |
|
7.
|
R1= 4 см; R2= 10 см; R3= 16 см; r1= 2 см; r2= 6 см; r3= 10 см | |
|
8.
|
R1= 6 см; R2= 12 см; R3= 18 см; r1= 3 см; r2= 8 см; r3= 12 см | |
Продолжение табл. 4
|
9.
|
R1= 2 см; R2= 10 см; R3= 14 см; r1= 5 см; r2= 5 см; r3= 10 см | |
|
10.
|
R1= 6 см; R2= 10 см; R3= 18 см; r1= 3 см; r2= 6 см; r3= 12 см | |
|
11.
|
R1= 4 см; R2= 6 см; R3= 14 см; r1= 2 см; r2= 3 см; r3= 10 см | |

Продолжение табл. 4
|
12.
|
R1= 6 см; R2= 8 см; R3= 16 см; r1= 4 см; r2= 3 см; r3= 10 см | |
|
13.
|
R1= 10 см; R2= 12 см; R3= 16 см; r1= 8 см; r2= 9 см; r3= 10 см | |
|
14.
|
R1= 8 см; R2= 12 см; R3= 18 см; r1= 6 см; r2= 8 см; r3= 12 см | |
Продолжение табл. 4
|
15.
|
R1= 3 см; R2= 8 см; R3= 14 см; r1= 2 см; r2= 4 см;
|
|
16.
|
R1= 4 см; R2= 10 см; R3= 20 см; r1= 3 см; r2= 8 см;
|
|
17.
|
R1= 4 см; R2= 8 см; R3= 14 см; r1= 3 см; r2= 2 см; r3= 10 см |
Продолжение табл. 4
|
18.
|
R1= 6 см; R2= 8 см; R3= 16 см; r2= 4 см; r3= 8 см |
|
19.
|
R1= 6 см; R2= 7 см; R3= 14 см; r1= 4 см; r2= 6 см;
|
|
20.
|
R1= 4 см; R2= 8 см; R3= 14 см; r1= 3 см; r2= 2 см; r3= 10 см |
Продолжение табл. 4
|
21.
|
R1= 6 см; R2= 10 см; R3= 18 см; r1= 4 см; r2= 6 см; r3= 16 см | |
|
22.
|
R1= 5 см; R2= 7 см; R3= 16 см; r1= 4 см; r2= 5 см; r3= 12 см | |
|
23.
|
R1= 6 см; R2= 8 см; R3= 16 см; r1= 2 см; r2= 4 см; r3= 14 см | |
Продолжение табл. 4
|
24.
|
R1= 6 см; R2= 8 см; R3= 12 см; r1= 4 см; r2= 5 см; r3= 10 см | |
|
25.
|
R1= 6 см; R2= 12 см; R3= 16 см; r1= 5 см; r2= 10 см;
| |
|
26.
|
R1= 3 см; R2= 8 см; R3= 12 см; r1= 2 см; r2= 4 см; r3= 10 см | |
Продолжение табл. 4
|
27.
|
R1= 7 см; R2= 8 см; R3= 10 см; r1= 5 см; r2= 4 см; r3= 2 см | |
|
28.
|
R1= 6 см; R2= 8 см; R3= 12 см; r1= 4 см; r2= 4 см; r3= 6 см | |
|
29.
|
R1= 6 см; R2= 7 см; R3= 14 см; r1= 2 см; r2= 6 см; r3= 6 см | |
|
Окончание табл. 4 | ||
|
30.
|
R1= 6 см; R2= 12 см; R3= 16 см; r1= 5 см; r2= 10 см; r3= 4 см | |