12) Высота зубьев:
 .
.
13) Толщина зубьев по окружности вершин:
для шестерни  ,
,
для колеса  .
.
Порядок построения профилей зубьев колес в зацеплении
1. Переведем все окружности, характеризующие
параметры зуба, рассчитанными радиусами
(делительные окружности
 ,
начальные окружности
,
начальные окружности ,
основные окружности
,
основные окружности ,
окружности впадин
,
окружности впадин ,
окружности вершин
,
окружности вершин ),
для шестерни и для колеса, при этом
начальные окружности
),
для шестерни и для колеса, при этом
начальные окружности и
и должны совпасть в одной точке – точке
зацепления р.
должны совпасть в одной точке – точке
зацепления р.
2. Проведем через точку зацепления линию
зацепления NNпод углом (касательную в точках А и В к основным
окружностям
(касательную в точках А и В к основным
окружностям и
и ).
).
3. Отрезок рА (рВ – для шестерни) разобьем на 6 (минимум) равных частей.
4. Перенесем полученные 6 частей отрезка
на основную окружность
 .
.
5. Проведем касательные к полученным точкам на окружности.
6. Отложим на касательной от первой точки
(ближней к точка А) отрезок, длина которого
равна разности длины отрезка рА и длины
одной части а:
 .
Получим первую точку на эвольвенте
зуба.
.
Получим первую точку на эвольвенте
зуба.
7. Отложим на касательной от второй точки
отрезок, длина которого равна разности
длины отрезка рА и длины двух частей
2а:
 и т.д. до шестой точки. Получим шесть
точек – часть эвольвенты.
и т.д. до шестой точки. Получим шесть
точек – часть эвольвенты.
8. Отложим на линии зацепления NN за точкой А некоторое число тех же отрезков длиной а.
9. Проведем касательные к полученным точкам.
10. Отложим на касательной от первой
точки (ближней к точка А) отрезок, длина
которого равна сумме длины отрезка рА
и длины одной части
 .
Получим точку на эвольвенте зуба выше
точки р, представляющую собой продолжение
эвольвенты.
.
Получим точку на эвольвенте зуба выше
точки р, представляющую собой продолжение
эвольвенты.
11. Отложим на касательной от второй
точки отрезок, длина которого равна
сумме длины отрезка рА и длины двух
частей 2а:
 и т.д., пока получаемые точки не выйдут
за окружность вершин, ограничивающую
область существования зуба.
и т.д., пока получаемые точки не выйдут
за окружность вершин, ограничивающую
область существования зуба.
12. Соединив полученные точки, получим эвольвенту.
13. Продолжим линию эвольвенты до
окружности впадин, выполнив сопряжение
радиусом
 .
.
14. Зеркально отразим половину профиля
зуба относительно его оси, принимая во
внимание рассчитанные значения толщины
зуба по делительной окружности
 ,
толщины впадин по делительной окружности
,
толщины впадин по делительной окружности ,
толщина зубьев по окружности вершин
,
толщина зубьев по окружности вершин .
.
15. Выполним аналогичные действия с пункта №3 для шестерни. Эвольвенты профилей зубьев шестерни и колеса не должны накладываться друг на друга (явление интерференции).
16. Выполним операцию копирования
полученных профилей зубьев на колесе
и на шестерне, получив 3-4 профиля. При
этом принимаем во внимание рассчитанные
значения шага по делительной окружности
 и
и
шага по основной окружности
 .
Построение эвальвентного зацепления
приведено на рисунке 25.
.
Построение эвальвентного зацепления
приведено на рисунке 25.
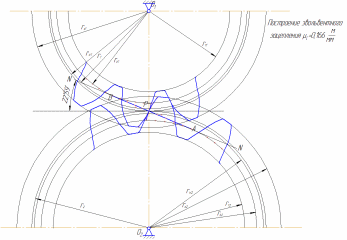
Рисунок 25 – Зубчатое зацепление
9. Сложные зубчатые механизмы
Структурный анализ
На рисунке №26 изображена схема сложного зубчатого механизма.
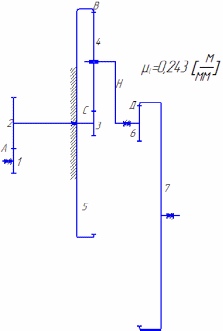
Рисунок 26 – Схема сложного зубчатого механизма
Определим тип механизма. Для этого в начале разложим схему механизма на отдельные ступени. Схема рассматриваемого сложного зубчатого механизма образована последовательным соединением следующих ступеней:
1 − простой однорядный зубчатый механизм с внешним зацеплением (1−2);
2 − типовой планетарный двухступенчатый
зубчатый механизм с одним внешним и
одним внутренним зацеплениями ( );
);
3 − простой однорядный зубчатый механизм с внутренним зацеплением (6−7).
Все звенья сложного зубчатого механизма совершают движение параллельно одной плоскости, поэтому представляет собой плоский механизм.Следовательно, для определения подвижности данного механизма воспользуемся формулой Чебышева:
 ,
,
где
 и
и
 – количество
кинематических пар с подвижностью
равной единице и двум соответственно,
– количество
кинематических пар с подвижностью
равной единице и двум соответственно, ‑ количество
подвижных звеньев кинематической цепи.
‑ количество
подвижных звеньев кинематической цепи.
Из
анализа схемы вытекает: трехрядный
зубчатый механизм состоит из стойки 0,
5, представленной тремя шарнирно-неподвижными
опорами и пяти подвижными звеньями 1,
2-3, 4, 6-Н, 7. Колеса 3 − 6, водило Н и
зубчатое колесо 7 жестко соединены друг
с другом и образуют блоки зубчатых
колес, которые рассматриваются как
отдельные подвижные звенья 3, 6 и 7. Колесо
5 является неподвижным звеном,
следовательно, оно входит в состав
стойки 0 и рассматривается с ней как
одно звено.В этом случае .
.
Механизм представленный на рисунке 26 имеет в своей структуре дефекты. А именно, все кинематические пары представлены четвертым классом, то есть не имеют осевых ограничений. В этом случае зубчатые колеса могут совершать поступательные движения по своим геометрическим осям, что может привести к выводу колес из зацепления. При этом постоянство зацепления будет нарушено, следовательно, механизм становится не работоспособным.
Так же, в структурном анализе учитывается только один сателлит во второй ступени сложного механизма, так как остальные сателлиты будут являться избыточными связями, вследствие разделения ими потока механической энергии и образования нескольких замкнутых контуров.
На рисунке 27 представлена исправленная структурная схема сложного зубчатого механизма (с осевыми ограничениями).
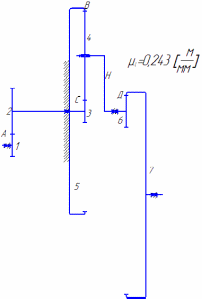
Рисунок 27 – Исправленная структурная схема сложного зубчатого механизма
Для
определения значений коэффициентов
 и
и выявим все кинематические пары, входящие
в состав схемы механизма. Результаты
анализа заносим в таблицу 12.
выявим все кинематические пары, входящие
в состав схемы механизма. Результаты
анализа заносим в таблицу 12.
Таблица №12
|
№ |
Номера звеньев |
Схема |
Класс/ подвижность |
Вид контакта/ замыкание |
|
1 |
0 – 1 |
|
5/1 |
поверхность (низшая)/ геометрическое |
|
2 |
1 – 2 |
|
4/2 |
линия (высшая)/ геометрическое |
|
3 |
2 – 0 |
|
5/1 |
поверхность (низшая)/ геометрическое |
|
4 |
3 – 4 |
|
4/2 |
линия (высшая)/ геометрическое |
|
5 |
4–5 |
|
5/1 |
линия (низшая)/ геометрическое |
|
6 |
4 – Н |
|
4/2 |
поверхность (высшая)/ геометрическое |
|
7 |
6– 0 |
|
5/1 |
поверхность (низшая)/ геометрическое |
|
8 |
6 – 7 |
|
4/2 |
линия (высшая)/ геометрическое |
|
9 |
7– 0 |
|
5/1 |
поверхность (низшая)/ геометрическое |









Схема
механизма содержитпять
низших одноподвижных кинематических
пар: 1 – 0, 2 – 0, 4 – 5,
6 – 0, 7 – 0 и четыре высшие
кинематические пары с подвижностью
равной двум: 1 – 2, 3 – 4, 4 – Н
и 6 – 7. Тогда ,
а
,
а .
.
Подставив выявленные значения коэффициентов в формулу Чебышева,
будем иметь:

Полученный результат говорит, что подвижность сложного зубчатого механизма равна единице, что подтверждает его принадлежность к плоским механизмам.
Синтез сложных зубчатых механизмов
Таблица № 13
|
i17 |
|
m, мм |
|
124 |
3 |
0,3 |

Разобьем передаточное отношение на составляющие, в соответствии с составом механизма и подберем его числовые значения:
 .
.
Назначим




Запишем условие соосности:

Далее выразим числа зубьев через коэффициенты:
 .
.
Следовательно условие соостности через коофициенты будет выглядеть следующим образом:

 и
и

Произведем расчет чисел зубьев для трех вариантов и занесем все значения в таблицу 11
Таблица 14
|
№ |
A |
B |
C |
a |
b |
|
|
|
q |
|
1 |
2 |
8 |
1 |
1 |
18 |
2 |
8 |
18 |
8 |
|
16 |
64 |
126 | |||||||
|
2 |
1 |
4 |
3 |
3 |
9 |
3 |
12 |
27 |
6 |
|
18 |
72 |
162 | |||||||
|
3 |
6 |
24 |
2 |
2 |
54 |
12 |
48 |
108 |
2 |
|
24 |
96 |
216 |



Для обеспечения отсутствия контакта сателлитов друг с другом необходимо проверить условие соседства:
 ,
,
где k– число сателлитов;
Рассмотрим условие соседства для всех вариантов:
Вариант 1:
 ;
; .
.
Следовательно, условие соседства для первого варианта выполняется.
Вариант 2:
 ;
; .
.
Следовательно, условие соседства для второго варианта выполняется.
Вариант 3:
 ;
; .
.
Следовательно, условие соседства для третьего варианта выполняется.
Условие соседства выполняется для всех вариантов, следовательно, при проверке условия сборки будут по-прежнему проверяться все три варианта.
Для обеспечения собираемости планетарного механизма необходимо проверить условие сборки:
 ,
,
где p– количество полных оборотов, совершаемых солнечным колесом (целое число от 1 до бесконечности);
B– целое натуральное число.
Сборка возможна лишь при условии, что при любом значении pзначениеBбудет целым числом.
Проверим условие сборки для всех вариантов.
Вариант 1:
 .
.
Для первого варианта условие сборки не выполняется, поскольку при любом значении рзначениеВбудет дробным.
Вариант 2:
 .
.
Для второго варианта условие сборки выполняется, поскольку при любом значении рзначениеВбудет целым числом.
Вариант 3:

Для третьего варианта условие сборки выполняется, поскольку при любом значении рзначениеВбудет целым числом.
Так как 2 и 3 варианты подходят то выберем тот который обеспечит наиболее меньшие габаритные размеры, то есть второй вариант:

Следующим шагом определим число зубьев колес простых передач 1-2 и 6-7:


Отсюда
z1=36,z2=18,z6=155,z7=76.
Построение сложного зубчатого механизма
Определим делительные диаметры.







Рассчитаем масштабный коэффициент длин для данной схемы:

Переведем все диаметры в масштабный коэффициент:
Таблица 15
|
|
|
|
|
|
|
|
|
22,22 |
46,15 |
22,22 |
88,88 |
200 |
32,05 |
198,7 |







Построим кинематическую схему механизма в найденном масштабном коэффициенте. Расстояние между колесами берем произвольным, поскольку оно не влияет на передаточную функцию механизма.
Перейдем к построению планов скоростей.



Выберем масштабный коэффициент скоростей и построим планы линейных и угловых скоростей:

После построения плана линейных скоростей и умножения полученных значений на масштабный коэффициент, получим:
После построения плана линейных скоростей и умножения полученных значений на масштабный коэффициент, получим:
Перейдем к построению плана угловых скоростей.
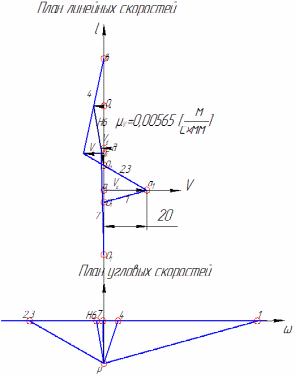
Рисунок 28 – План линейных и угловых скоростей
Для плана угловых скоростей:

Проверка передаточного отношения:
 ,
,
 ,
,
 ,
,
Проверка: