

Динамическую точность систем стабилизации оценивают по величине
мгновенного максимального отклонения xвых,max или по величине среднеквадратичного отклонения xсркв по отношению к заданному значению выходной координаты (%). Вторая оценка полнее характеризует точность системы, так как основана на статистических характеристиках САУ.
7.2. Системы программного управления.
К таким САУ относятся, прежде всего, системы управления металлорежущими станками и промышленными роботами, исполнительные органы (резцы станка, схваты манипулятора и т. п.) которых имеют сложные программные законы движения по одной или нескольким пространственным координатам. Программное управление такими САУ осуществляют, как правило, с помощью систем числового программного управления (СЧПУ) того или иного класса (NC, CNC, SNC, DNC) /3/. Специфика СЧПУ подробно рассматривается учебной дисциплиной“Автоматизация типовых производственных процессов”, в настоящем разделе рассмотрены лишь основные требования к формированию программных режимов работы САУ.
К классу систем программного управления предъявляются те же требования, что и к системам стабилизации в динамических режимах плюс ряд специфических требований, связанных с ограничением координат состояния объекта управления на допустимых уровнях. В отличие от систем стабилизации СЧПУ при позиционном и позиционно-контурном управлении могут функционировать в режимах больших отклонений координат, в том числе – при больших отклонениях выходной координаты (положении исполнительного органа). В этой связи основные требования к программным системам управления можно сформулировать следующим образом:
а) максимум быстродействия при минимуме динамической ошибки отработки любых программно-задающих воздействий;
б) ограничение координат САУ на допустимых уровнях во всех динамических режимах.
Эти требования тесно взаимосвязаны и обеспечиваются следующими техническими (в общем случае - программно-аппаратными) средствами:
применением дополнительных нелинейных обратных связей по ограничиваемым координатам САУ (типа “отсечек”);
применением задатчиков интенсивности (первого или второго рода);
ограничением задающих воздействий внутренних контуров регулирования в многоконтурных САР, прежде всего в системах подчиненного регулирования координат;
формированием таких программно-временных задающих воздействий, которые учитывают реальные динамические характеристики (возможности) объекта управления.
В электромеханических САУ требуется ограничивать на допустимых уровнях следующие координаты:
скорость электродвигателя (max);
ток якоря двигателя постоянного тока (iя iя,max, iя,max= iя,ном, -перегрузочная способность двигателя) или ток статора
асинхронного двигателя с короткозамкнутым ротором (ic ic,max);
скорость изменения тока якоря (статора) двигателя на допустимом уровне; для электрических машин обычного исполнения эта величина составляет (20-50) номинальных значений тока за секунду;
ускорение электропривода (исполнительного механизма, рабочего органа) на уровне, определяемом требованиями технологического процесса, комфортности и др.
Ограничение координат САУ применением дополнительных
нелинейных обратных связей.
На рис. 7.2. приведена функциональная схема системы регулирования
скорости электропривода постоянного тока с дополнительной обратной связью типа “отсечка”.
Нелинейная обратная связь по току якоря вступает в действие, когда
ток якоря превысит максимально допустимое значение. При этом реализуется условие: Uдт > Uотс, гдеUотс– напряжение“отсечки” нелинейного звена. Напряжение отрицательной обратной связи Uнзприводит к снижению напряжения управления силового преобразователя иcтабилизирует ток якоря на уровне максимально допустимого. В режиме токоограничения среднее значениеUдт Uотс.
Заметим, что регулятор скорости, обеспечивающий оптимальное в смысле какого либо критерия регулирование скорости, должен иметь переменную структуру, изменяющуюся при выходе тока на режим
о граничения.
С целью снижения выбросов тока якоря в
такие моменты времени применяют так
называемое“упреждающее
токоограничение”,
обеспечиваемое за счет дополнительной
положительной обратной связи по скорости
или э.д.с. двигателя, подаваемой на вход
тиристорного преобразователя.
граничения.
С целью снижения выбросов тока якоря в
такие моменты времени применяют так
называемое“упреждающее
токоограничение”,
обеспечиваемое за счет дополнительной
положительной обратной связи по скорости
или э.д.с. двигателя, подаваемой на вход
тиристорного преобразователя.
Ограничение координат САУ с помощью задатчиков
интенсивности.
Задатчики интенсивности (ЗИ) служат для ограничения
промежуточных координат САУ. В электромеханических системах управления с помощью ЗИ ограничивают, прежде всего, ускорение и рывок рабочего органа (первую и вторую производные скорости электропривода).
Задатчики интенсивности 1-го рода служат для ограничения ускорения (замедления) электропривода и обеспечивают либо постоянство ускорения (замедления), либо постоянство времени регулирования при скачкообразном изменении сигнала задания скорости.
С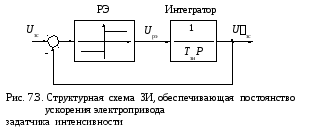 труктурная
схема ЗИ 1-го рода, обеспечивающего
постоянство ускорения электропривода
в переходных режимах, приведена на на
рис. 7.3.
труктурная
схема ЗИ 1-го рода, обеспечивающего
постоянство ускорения электропривода
в переходных режимах, приведена на на
рис. 7.3.
Напряжение задания скорости Uзсможно изменять ступенчато, однако выходной сигнал ЗИ будет меняться линейно в функции времени:
Uзи = Uзс=(1 / Tзи)Uрэ t,
где Uрэ– напряжение релейного элемента (РЭ),Uрэ=Uрэ.maxsign(Uзс - Uзс).
Р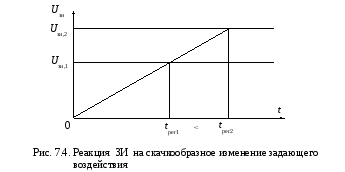 еакция
ЗИ различные по величине ступенчатые
воздействия приведена на на рис. 7.4.
еакция
ЗИ различные по величине ступенчатые
воздействия приведена на на рис. 7.4.
Задатчик интенсивности устанавливают на входе замкнутого контура регулирования скорости, который отрабатывает линейное задание скорости с некоторой динамической ошибкой, т. е. максимальное ускорение электропривода будет определяться только параметрами ЗИ (Uрэ.max , Tзи) и коэффициентом передачи замкнутого контура скорости (1 / Kc):
max = (d / dt)max = Uрэ.max / Tзи Kc .
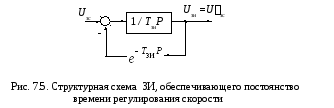
Структурная схема ЗИ, обеспечивающего постоянство времени регулирования при ступенчатых изменениях задающего воздействия, приведена на рис. 7.5.
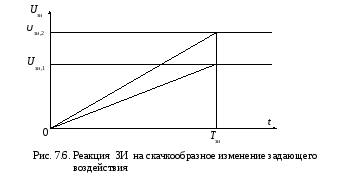
Реакция такого ЗИ на ступенчатые изменения задающего воздействия приведена на рис. 7.6. Как видим, время отработки произвольного по величине скачка задания скорости постоянно и равно постоянной времени Tзи . Ускорение электропривода с таким ЗИ – величина переменная и зависит от приращения скорости за времяTзи .
Задатчик интенсивности 2-го порядка в отличие от рассмотренных ЗИ содержит интегратор 2-го порядка, что позволяет ограничить на допустимом уровне не только первую, но и вторую производную регулируемой координаты. Следует отметить, что функции ЗИ в современных СЧПУ легко реализуются программно или аппаратно (на основе дискретных интегральных микросхем) / 3 /.
Ограничение координат САУ посредством ограничения
задающих воздействий.