

2.4.3 Система группового и индивидуального управления органами регулирования суз
Система группового и индивидуального управления ОР СУЗ предназначена для контроля положения ОР СУЗ в активной зоне и перемещения ОР в активной зоне посредством воздействия импульсов постоянного тока на привод шагового электромагнита.
Система управления приводами ОР СУЗ РУ выполняет функции управляющей системы важной для безопасности и предназначена для организации перемещения органов регулирования при ручном и автоматическом управлении, а также при срабатывании сигналов АЗ, ПЗ и УПЗ.
В настоящее время (вторая половина 2008 года) на энергоблоках ОП ЗАЭС установлены системы управления органами регулирования СУЗ нескольких типов:
- энергоблоки №1 и №6 – СГИУ разработки и производства ВНИИЭМ;
- энергоблок №2 – ПТК СГИУ-И (Северодонецкое НПО «Импульс»);
- энергоблоки №3, №4 и №5 – ПТК СГИУ-М («Skoda», Чехия).
Рассмотрим назначение, структурную схему и принцип работы комплекса технических средств СГИУ ВНИИЭМ.
Функции, выполняемые СГИУ:
- выбор любого из 61 ОР СУЗ с помощью блока индивидуального выбора ОР, расположенного на пульте БЩУ, путем выбора координат данного привода и формирования команды «больше» («меньше») для перемещения ОР с помощью ключа «Инд. Упр.»;
- перемещение вверх (вниз) любой из 10 групп ОР с помощью ключа «Гр. Упр.», путем выбора номера нужной группы на блоке выбора группы;
- перемещение ОР вверх в групповом режиме последовательно, начиная с 1 группы, от концевого нижнего выключателя до концевого верхнего выключателя или вниз, начиная с 10 группы, от концевого верхнего выключателя до концевого нижнего выключателя по заданному алгоритму от ключа «Гр. Упр.» с рабочей скоростью перемещения, равной 20±1,5 мм/с;
- перемещение вверх (вниз) регулирующей группы ОР СУЗ в автоматическом режиме от АРМ;
- введение запрета на движение ОР вверх при воздействии команды ПЗ-2 до снятия сигнала П3-2;
- поочередное перемещение вниз групп ОР СУЗ с рабочей скоростью до концевого нижнего выключателя, начиная с 10 группы, при воздействии команды ПЗ-1 и прекращение движения ОР при снятии команды ПЗ-1;
- сброс одной группы до концевого нижнего выключателя при прохождении сигнала УПЗ;
- сброс всех ОР до концевого нижнего выключателя при воздействии команды АЗ. Время падения ОР с полной высоты рабочего хода при обесточении электромагнитов в пределах 1,5÷4,0 с;
- групповое управление ОР СУЗ 5-ой группы от ключа «5 ГРУППА». Эта группа исключена из общего алгоритма группового управления. На нее команды ПЗ-1 и ПЗ-2 не воздействуют.
Непосредственно на ядерном реакторе расположены следующие устройства:
- приводы ШЭМ - шаговые электромагнитные, перемещающие ОР вверх или вниз с рабочей скоростью, пошагово – 20 мм/с;
- датчики УКП и ДПЛ - устройства контроля положения, формирующие сигналы положения ОР в пределах между концевыми нижними и верхними выключателями;
- блоки электроразводок.
Привод ШЭМ является исполнительным механизмом СУЗ реактора ВВЭР-1000 и обеспечивает вертикальное возвратно-поступательное перемещение или удержание ОР. Привод предназначен для:
- перемещения органа регулирования СУЗ в режимах ручного и автоматического управления от ключей управления и по сигналам ПЗ-1 и УПЗ;
- фиксации его в крайних и промежуточных положениях;
- аварийного останова реактора путем сброса ОР при обесточении приводов в режиме АЗ.
Привод с помощью трех электромагнитов тянущего, запирающего и фиксирующего, обеспечивает возвратно-поступательное шаговое перемещение или удержание штанги с органом СУЗ. Режим перемещения штанги привода обеспечивается подачей импульсов тока, поступающий в определенной последовательности на катушки электромагнитов, в результате чего подвижная защелка запирающего электромагнита и работающий тянущий электромагнит перемещают штангу на один шаг, а защелка фиксирующего электромагнита удерживает ее между перемещениями.
Режим стоянки привода обеспечивается подачей тока на фиксирующий электромагнит, в результате чего фиксирующая защелка обеспечивает удержание штанги.
В режиме аварийной защиты все три электромагнита обесточиваются, защелки открываются, штанга с ОР под действием собственной массы перемещается в активную зону реактора.
Устройство контроля положения органов регулирования использует в качестве первичного преобразователя линейный датчик положения (ДПЛ). Датчик ДПЛ обеспечивает выдачу информации о положении ОР по всей длине рабочего хода штанги (3500 мм) через каждые 350 мм и информацию о достижении ОР конечных положений.
Датчик состоит из блока катушек, корпуса, чехла.
Блок катушек состоит из семи катушек, размещенных в герметичном защитном корпусе. Корпус обеспечивает защиту блока катушек от воздействия воды первого контура.
При установке датчика на привод ШЭМ, сам датчик устанавливается внутри блока перемещения и входит вовнутрь штанги. Когда ОР находится на механическом упоре, первая катушка датчика расположена в зоне шунта.
При извлечении ОР из активной зоны, шунт совместно со штангой перемещается вдоль корпуса датчика, перекрывая последовательно зоны катушек изменяя их индуктивность. Изменение индуктивности приводит к изменению напряжения на катушке на один вольт. При достижении шунтом седьмой катушки датчика, первая катушка начинает выходить из-под шунта. Когда ОР достигают верхнего концевого выключателя, под шунтом остается только седьмая катушка.
Преобразование напряжения с катушек датчика ДПЛ в индикацию положения ОР производится в панели ПКУ.
Указатель конечных положений (УКП) предназначен для контроля положения ОР СУЗ в крайних верхнем и нижнем положении. УКП состоит из: корпуса датчика, шунта, трубы с двумя упорами и комплекта пружин.
Когда на верхний и нижний упор датчика не воздействует штанга, шунт за счет пружин находится в зоне 4-ой катушки. Напряжение на 4 катушке максимальное. По индикации формируется сигнал «положение ОР между верхним концевым выключателем и нижним концевым выключателем».
При движении штанги привода вверх, штанга торцевой поверхностью нажимает на верхний упор датчика и шунт вместе со штангой делает ход вверх на 40 мм, сжимая пружины. При этом шунт перемещается в зону 5-ой катушки, изменяя ее индуктивность. На катушке изменяется напряжение с минимального до максимального, что соответствует положению штанги в зоне верхнего концевого выключателя.
При движении штанги привода вниз из зоны 4-ой катушки, шунт перемещается вниз, за счет воздействия штанги на нижний упор датчика, на 40 мм в зону 3-й катушки и останавливается за счет формирования сигнала от нижнего концевого выключателя. При обесточении привода ШЭМ орган регулирования опускается на механический упор, штанга перемещает шунт в зону 2-й катушки.
В обстройке реакторного отделения расположено следующее оборудование:
- панель промклеммников (ППК), предназначенная для коммутации входных и выходных сигналов с панелями системы СУЗ;
- панель группового управлениями (ПГУ), предназначенная для организации алгоритма перемещения групп органов регулирования при ручном управлении, по сигналам АРМ и по сигналам ПЗ-1;
- панель индивидуального выбора органов регулирования (ПИВ), предназначенная для фиксации координат органа регулирования, выбранного оператором, для перемещения органа регулирования в активной зоне от ключа с БЩУ;
- панель контроля и управления (ПКУ), предназначенная для преобразования сигнала от датчика положения в аналоговый сигнал индикации положения ОР СУЗ и формирования команд управления;
- панель силового управления приводом (ПСУ), предназначенная для управления шаговым электромагнитным приводом;
- аппаратура электропитания;
- блоки индикации , собранные в 10 рабочих групп, предназначенные для индикации на БЩУ положения органов регулирования по зонам;
- ключ подачи силового питания 220 В от секций CЕ и СF на панели питания оборудования СГИУ;
- стрелочные приборы, предназначенные для контроля силового питания 220 В от секций CE и CF на панели питания СГИУ.
Структурная схема СГИУ представлена на рисунке 26.
Программно - технический комплекс группового и индивидуального управления ОР СУЗ СГИУ-М предназначен для:
- силового управления приводами ОР СУЗ;
- контроля положения ОР СУЗ по высоте активной зоны реактора;
- группового и индивидуального управления ОР СУЗ во всех режимах работы РУ;
- диагностики, отображения и архивирования данных о состоянии комплекса.
СГИУ-М состоит из следующих подсистем:
- подсистема силового управления приводами ШЭМ-М;
- подсистема контроля положения ОР СУЗ;
- подсистема группового и индивидуального управления ОР СУЗ;
- подсистема диагностики;
- подсистема приёма и обработки команд АЗ и УПЗ.
Структурная схема ПТК СГИУ–М приведена на рисунке 27.
Подсистема силового управления состоит из 61-го автономного канала управления, которые размещены в панелях 1÷31ПСУ. Панель силового управления ПСУ состоит из 2-х независимых идентичных каналов, каждый из которых предназначен для управления одним приводом ШЭМ-М ОР СУЗ.
Подсистема контроля положения состоит из 61-го автономного канала, которые размещены в 16-ти панелях ПКП. Каждая панель содержит 4 канала.
Для получения информации о положении ОР СУЗ в активной зоне РУ, на приводах ШЭМ-М установлены датчики положения ОР СУЗ. К подсистеме относится 61 индикатор положения в устройствах УГИП, расположенных на панелях БЩУ и РЩУ. Каждый канал контроля положения работает независимо от других каналов и выполняет все функции контроля и индикации положения одного ОР.
Исполнительными органами СУЗ является сборка поглощающих элементов, в качестве поглотителя используется карбид бора. Сборки перемещаются в направляющих каналах тепловыделяющих сборок и БЗТ. Каналы БЗТ предотвращают изгиб ПЭЛ в процессе работы и защищают их от поперечных воздействий потока теплоносителя.
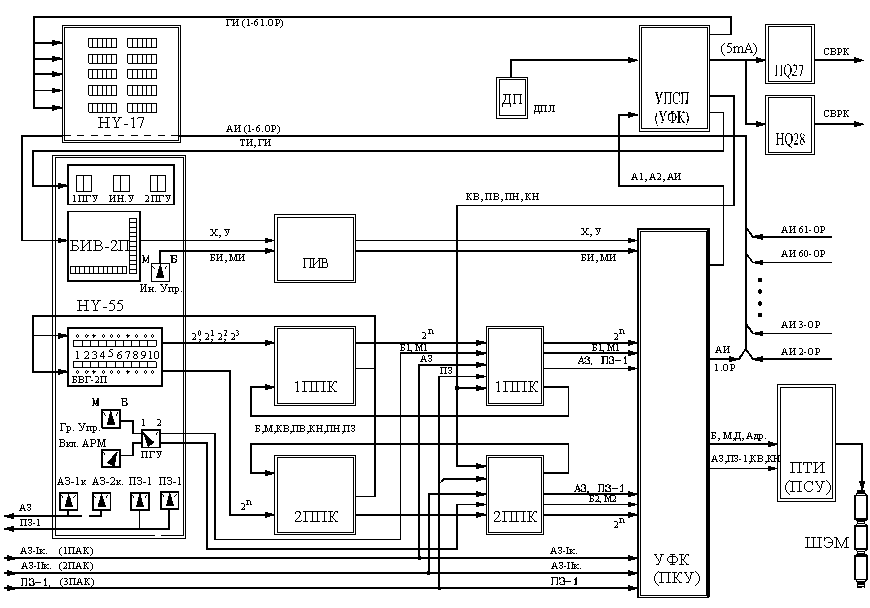
Рисунок 26 – Структурная схема СГИУ
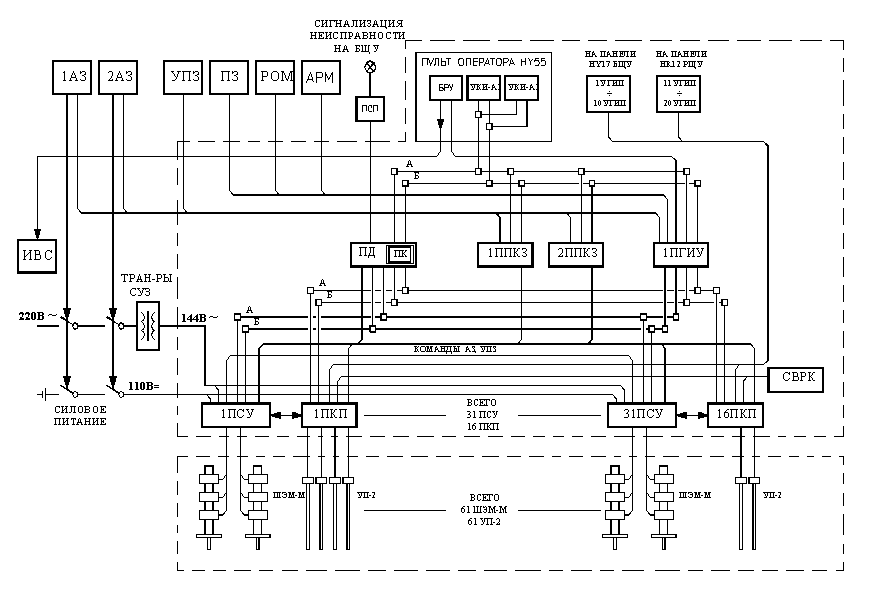
Рисунок 27 – Структурная схема СГИУ-М
Подсистема группового и индивидуального управления выполняет все функции комплекса, которые связаны с управлением перемещения ОР СУЗ за исключением сброса ОР по сигналам защит АЗ и УПЗ.
Подсистема группового и индивидуального управления состоит из следующих составных частей:
- трех идентичных каналов группового и индивидуального управления в панели ПГИУ;
- устройства коммуникации и индикации УКИ-А1 на пульте оператора HY55;
- устройства коммуникации и индикации УКИ-А2 на пульте оператора HY55;
- блока ручного управления БРУ на пульте оператора HY55;
- блока внешних подключений БП внутри пульта оператора HY55.
Каждый канал ПГИУ выполняет следующие функции:
- групповое управление перемещением групп ОР СУЗ по командам от АРМ и по сигналам ПЗ-1, а в режиме ручного управления от ключа «ГУ» оператором с БЩУ;
- управление любой одной группой ОР по командам оператора;
- управление ОР СУЗ 5-й группы от ключа «Управление 5-ой группой»;
- управление индивидуальным ОР СУЗ по командам оператора от ключа «ИУ»;
- введение запрета на перемещение ОР вверх при поступлении сигналов ПЗ-2;
- регистрацию падения ОР и выдачу сигнала о падении ОР в комплект ПЗ;
- подготовку данных о положении и направлении движения ОР для индикации при их групповом или индивидуальном управлении;
- формирование сигнала оповещения оператору при необходимости выравнивания ОР в группе и при нарушении жесткой последовательности групп;
- реализацию алгоритма «дотягивания» ОР;
- формирование сигналов «Неисправность ПГИУ», «Неисправность HY55 БЩУ» для панели диагностики;
- выдачу сигнала о неспособности выполнять функцию ПЗ-1;
Каждый канал принимает сигналы от панелей: ПКП, ПСУ, с пульта оператора. После их обработки формируются и посылаются на соответствующие устройства управляющие и информационные сигналы, обеспечивая тем самым надежную работу системы СГИУ по всем заданным критериям.
К подсистеме силового управления каналы ПГИУ подключены по двум дублированным магистралям последовательной передачи данных. Одна магистраль охватывает 31 канал силового управления - первый сектор, а вторая остальные 32 канала силового управления - второй сектор. Каждый из трех каналов ПГИУ выдает по магистрали команды на движение конкретного ОР СУЗ вверх или вниз. В канале ПСУ проводится мажоритарная обработка этих команд. Перемещение ОР в данном направлении проводится только при условии совпадения команд как минимум от двух из трех каналов ПГИУ.
К подсистеме контроля положения каналы ПГИУ подключены по двум дублированным магистралям последовательной передачи данных. Каждый из трех каналов ПГИУ выдает на магистраль команды на движение конкретного ОР СУЗ вверх или вниз. В канале ПКП проводится мажоритарная обработка этих команд.
Команды от ключей управления передаются в ПГИУ в виде дискретных сигналов напряжением 24 В постоянного тока по трем каналам, причем сигналы для передачи по одному каналу снимаются с контактов одного этажа ключа (переключателя). В каналах ПГИУ программным путем проводится мажоритарная обработка поступивших сигналов. Кроме того, при несовпадении всех трех сигналов от одного ключа формируется сигнал «Неисправность ».
Таким же образом подаются в каналы ПГИУ команды по трем каналам от АРМ, но с той разницей, что при несовпадении команд во всех каналах сигнал неисправности не формируется.
Сигналы ПЗ-1 и ПЗ-2 подаются на три канала ПГИУ.
Информация о группе, выбранной для группового управления, о координатах ОР, выбранного для индивидуального управления и остальная информация с пульта оператора поступает на ПГИУ по линии коммуникации.
Устройство коммуникации и индикации УКИ-А1 выполняет следующие функции:
- индикацию номера, положения и направления движения главной группы ОР, выбранной для автоматического управления;
- индикацию номера, положения и направления движения группы ОР, выбранной для ручного управления;
- индикацию координат, положения и направления движения ОР, выбранного для индивидуального управления;
- выбор координат ОР для индивидуального управления;
- съем ПЗ-2;
- съем сигнала оповещения оператору.
Панель блока индивидуального выбора выполнена в виде картограммы реактора. Направо от картограммы находятся кнопки выбора координаты Х, спереди кнопка выбора четного, а сзади нечетного значения координаты Y.
Блок индикации предназначен для отображения информации о группе управляемых ОР и информации об индивидуально управляемом ОР.
Устройство УКИ-А2 предоставляет оператору дополнительную информацию:
- о точном положении ОР СУЗ в виде гистограмм;
- о размещении ОР СУЗ в зоне реактора;
- отображает выбранные для ручного управления ОР СУЗ.
Блок ручного управления служит в качестве устройства управления ПГИУ. Блок позволяет управлять органами регулирования, как по группам, так и индивидуально. БРУ расположен на пульте оператора HY-55 на БЩУ.
Блок внешних подключений (БП) находится внутри пульта оператора и содержит ряды клемм для ввода питающего напряжения, подключения кабелей от ПГИУ и некоторых других частей, разъемы для подключения линий дублированной магистрали коммуникации УКИ и модуля питания, предназначенного для диодной развязки двух вводов напряжения питания для БРУ.
Подсистема диагностики состоит из панели диагностики (ПД), которая обеспечивает:
- регистрацию и сигнализацию неисправностей в системе;
- сбор, обработку и отображение замеряемых данных, команд и сигналов управления;
- хранение выбранных данных и оповещений о неисправностях;
- информационную поддержку испытаний приводов ОР СУЗ реактора.
Основной составной частью панели являются персональный компьютер и монитор. Компьютер проводит обработку данных, отображение их на экране монитора и регистрацию выбранных данных на жестком диске.
Подсистема приема и обработки команд АЗ и УПЗ обеспечивает выполнение следующих функций:
- прием сигналов АЗ по трем каналам от двух комплектов аварийной защиты;
- обработку сигналов АЗ («2 из 3»), выдачу на ПСУ команд на сброс ОР СУЗ;
- прием сигналов УПЗ по трем каналам от комплекта УПЗ;
- выбор группы ОР СУЗ для УПЗ путем неоперативной установки перемычек;
- обработка сигналов УПЗ по принципу «2 из 3», выдача на ПСУ команд на обесточение электромагнитов приводов ОР СУЗ группы, выбранной для УПЗ;
- контроль и тестирование подсистем с передачей информации в панель диагностики.
Подсистема состоит из двух панелей ППКЗ, каждая из которых содержит идентичное трехканальное устройство приема и обработки команд защит.
Мажоритарная обработка сигналов АЗ и УПЗ введена с целью избежать падение группы ОР, выбранной для УПЗ в случае, когда на вход одного канала ППКЗ поступает ложный сигнал АЗ, а на вход другого канала ППКЗ поступает сигнал УПЗ, вызванные неисправностью указанных систем.
Программно-технический комплекс системы группового и индивидуального управления ПТК СГИУ–И является частью СУЗ реактора и вместе с ШЭМ и ДПЛ обеспечивает управление и контроль положения ОР СУЗ. ПТК СГИУ-И установлен на энергоблоке №2.
Функциональная схема ПТК СГИУ-И представлена на рисунке 28.
ПТК СГИУ-И состоит из следующих подсистем:
- защиты, группового и индивидуального управления ОР СУЗ (ПЗГИУ);
- приема и обработки команд защиты (ППКЗ);
- силового управления приводами (ПСУ);
- контроля положения (ПКП);
- электропитания (ПЭ);
- взаимодействия с оператором (ПВО);
- контроля и диагностирования состояния технических и программных средств (ПКД).
ПТК СГИУ – И включает следующие шкафы и устройства:
- шкаф управления приводом ШУП-3 - 31 шт.;
- шкаф контроля положения ШКП-1 - 8 шт.;
- шкаф защит и управления ШЗУ-1 - 3 шт.;
- шкаф формирования команд защит ШФКЗ-1 - 1 шт.;
- шкаф сервера контроля и диагностирования ШСКД-2 - 1 шт.;
- шкаф сопряжения ШС - 1 шт.;
- шкаф коммутации сигналов ШКС - 1 шт.;
- блок ручного управления БРУ-2 - 1 шт.
- блок группового и индивидуального выбора БГИВ-1 - 1 шт.;
- пульт оперативного наблюдения ПОН-2 - 1 шт.;
- табло индикации положения ТИП-3 - 2 шт.;
- индикатор положения привода ИПП-2 - 122 шт.;
- блок индикации БИд-87 - 1 шт.;
- шкаф электропитания ШП-3 - 3 шт.;
- шкаф распределительный электропитания управления ШРПу-4 - 2 шт.
ПТК СГИУ–И выполняет управляющие функции:
- удержание ОР в крайних или промежуточных положениях;
- индикацию положения всех ОР на БЩУ и РЩУ;
- отработку команд аварийной защиты АЗ;
- отработку команд ускоренной предупредительной защиты УПЗ;
- перемещение индивидуально выбранного ОР по команде оператора;
- перемещение жестко выбранной группы ОР вверх или вниз по команде оператора;
- перемещение группы ОР при пуске и останове РУ по команде оператора от ключа «ГРУППОВОЕ УПРАВЛЕНИЕ» в жесткой проектной последовательности движения групп;
- перемещение группы ОР при автоматическом регулировании мощности от регулятора АРМ в жесткой проектной последовательности;
- перемещение в любом направлении любой группы ОР по команде оператора от ключа «ГРУППОВОЕ УПРАВЛЕНИЕ»;
- формирование команды на последовательное движение вниз групп ОР (начиная с последней извлеченной из активной зоны реактора группы) в жесткой проектной последовательности при поступлении сигнала ПЗ–1;
- формирование программного запрета на любые перемещения групп и индивидуальных ОР вверх при поступлении сигнала ПЗ–2.
ПТК СГИУ–И выполняет информационные функции:
- отображение и регистрацию команд оператора на перемещение любого заданного ОР, любой заданной группы ОР, а также команд на движение в заданной последовательности групп ОР при пуске или останове реактора;
- отображение команд регулирования;
- отображение в цифровой форме и в виде гистограмм грубого положения отдельного ОР и групп ОР;
- выдача в систему внутриреакторного контроля СВРК информации в аналоговой форме о положении каждого ОР;
- контроль времени падения каждого ОР;
- формирование и индикация текущего положения и состояния ОР СУЗ на БЩУ и РЩУ;
- регистрация и визуализация параметров, их изменений и нарушений;
- передача информации во внешние подсистемы;
- контроль работоспособности оборудования ПТК СГИУ-И.
Подсистема силового управления предназначена для выполнения следующих функций для каждого ОР СУЗ:
- формирование необходимых циклограмм токов для электромагнитов привода ШЭМ в режимах движения и стоянки ОР;
- прием и формирование команд управления ОР СУЗ на основе мажоритарной логики «2 из 3» по сигналам, полученным от каждого из трех каналов комплекта ПЗГИУ;
- прекращение движения ОР при поступлении сигналов от концевых выключателей;
- удержание ОР в крайних и промежуточных положениях при исчезновении основного силового питания;
- формирование управляющих воздействий на электромагниты приводов ШЭМ или ШЭМ-М по командам ПЗГИУ или обесточивание катушек электромагнитов привода при поступлении команд аварийной защиты от ПЗГИУ или ППКЗ;
- обесточивание катушек электромагнитов привода при поступлении хотя бы двух сигналов АЗ от трех каналов ППКЗ либо двух команд защит от трех каналов ПЗГИУ;
- перемещение ОР СУЗ вверх или вниз с рабочей скоростью и удержание ОР СУЗ в достигнутом положении;
- прием команд защит и управления от ПЗГИУ;
- прием команд защит от ППКЗ;
- контроль состояния сопротивления и индуктивности катушек;
- передача информации о выполненном шаге и режиме управления в ПКП;
- передача в ПЗГИУ всей информации о состояниях и значениях параметров функционирования и всей диагностической информации.
Подсистема силового управления содержит 61 рабочий канал силового управления, которые размещены в панелях 1÷31ШУП-3.
Шкаф управления приводом ШУП состоит из 2-х независимых идентичных каналов, каждый из которых предназначен для управления одним приводом ОР СУЗ.
Подсистема контроля положения состоит из 61 идентичного, функционально независимого рабочего канала положения, которые размещены в 8-ми шкафах ШКП-1. Каждая панель содержит 8 каналов.
К подсистеме относится 61 индикатор положения привода ИПП-2, расположенные на БЩУ и на РЩУ.
Каждый канал контроля положения выполняет все функции контроля и индикации положения одного ОР, а именно:
определение номера зоны;
определение точного и дробного значения грубого положения внутри зоны;
обеспечение электрического питания датчика ДПЛ, контроль протекания тока в его цепи и измерение его значения;
измерение напряжения каждой катушки датчика и контроль целостности линии связи с датчиком;
определение общего количества шагов, выполненных приводом;
определение времени падения в каждой зоне и суммарного времени падения ОР и общего количества падений;
определение начальной и конечной зон падения ОР;
определение ширины зоны КН в шагах;
определение номера последней пройденной зоны и ее длины (в шагах);
определение номера привода;
формирование признаков «Падение ОР», «Двойное управление приводом» и «Нарушение положения привода»;
формирование сигналов «Неисправность ШКП» и «Неисправность устройства»;
передача данных и контроль целостности линий связи с БЩУ и РЩУ;
прием по линиям связи типа «токовая петля» информации от двух УСП;
взаимодействие с оператором;
контроль наличия напряжения на двух шинах электрического питания ШКП;
выполнение самодиагностики.
Подсистема защит, группового и индивидуального управления состоит из трех шкафов защит и управления ШЗУ-1.
Каждый ШЗУ в соответствии с алгоритмами управления выполняет формирование управляющих воздействий в подсистему силового управления по командам аварийной и предупредительной защиты от внешних подсистем СУЗ, по командам от АРМ и органов дистанционного управления оператора БЩУ и в соответствии с текущими положениями ОР СУЗ.
Подсистема приема и обработки команд защиты ППКЗ состоит из трехканального шкафа формирования команд защит ШФКЗ-1.
Каждый канал обеспечивает формирование десяти выходных сигналов «Сброс группы ОР СУЗ» для передачи их соответствующим группам каналов ШУП. Каждый УСП канала ШУП анализирует поступающие команды от трех каналов ШФКЗ по логике «2 из 3». При появлении на входе ШФКЗ сигнала АЗ от первого, либо второго комплекта АЗ, каналы ШФКЗ формируют все десять сигналов «Сброс группы ОР СУЗ». При появлении на входе ШФКЗ сигнала УПЗ от первого, либо второго комплекта УПЗ каналы ШФКЗ формируют сигнал «Сброс группы ОР СУЗ» только для группы, выбранной ключом на БЩУ.
Подсистема взаимодействия с оператором состоит из:
- двух табло индикации положения на БЩУ и РЩУ (объединяющих по 61 индикатору положения привода ИПП);
- блока индикации (БИ) положения регулирующей группы, группы для ручного управления и индивидуального ОР СУЗ;
- блока ручного управления (БРУ) пульта оператора БЩУ;
- блока группового и индивидуального выбора (БГИВ) пульта БЩУ;
- пульта оперативного наблюдения ПОН пульта оператора БЩУ.
Каждый индикатор положения привода ИПП табло индикации предназначен для представления оператору БЩУ и РЩУ в цифровом виде следующей информации:
- значения положения ОР СУЗ по 10 зонам с десятыми долями в зоне, положения ОР СУЗ на концевых выключателях и на нижнем жестком упоре;
- выбранного режима управления (группового/индивидуального).
Подсистема контроля и диагностирования состоит из:
- шкафа сервера контроля и диагностирования (ШСКД);
- шкафа сопряжения с внешними системами (ШС).
Шкаф сервера контроля и диагностирования ШСКД выполнен на базе персональной ЭВМ промышленного исполнения ПС5120.
Шкаф сервера контроля и диагностирования ШСКД предназначен для:
- контроля состояния технических и программных средств ПТК СГИУ-И и формирования обобщенного сигнала «Неисправность ПТК СГИУ-И» для включения сигнализации на БЩУ и передачи в УВС и СВРК;
- контроля состояния и режимов работы технологического оборудования, формирования информации о нарушениях или изменениях в работе и ведения статистической информации;
- регистрации и представления персоналу обобщенной информации результатов контроля, а также справочной информации;
- обеспечения СВРК, персонала БЩУ и смены цеха ТАИ оперативными данными текущего состояния технологического оборудования, а также технических и программных средств ПТК СГИУ-И;
- информационной поддержки персонала для обслуживания СГИУ-И и выполнения технологических операций.
Контроль состояния технических и программных средств СГИУ-И выполняется с глубиной до сменной составной части.
Обобщенный сигнал «Неисправность ПТК СГИУ-И» формируется в случае отказа хотя бы одного из устройств ПТК СГИУ-И, либо в случае возникновения нарушений, связанных с возможным ухудшением свойств ПТК СГИУ-И.
Регистрация и представление персоналу на мониторе ШСКД включают:
- представление на видеокадрах в графическом и текстовом видах оперативной информации о результатах контроля и диагностирования в том числе и циклограммы токов магнитов при перемещении привода в реальном времени;
- включение на видеокадрах цветовой сигнализации при появлении соответствующего нарушения;
- формирование диагностических сообщений о возникновении отказов технических средств с указанием времени, места и источника возникновения дефекта;
- архивирование, просмотр и протоколирование исходных данных и результатов диагностирования.
Шкаф сопряжения ШС-4 предназначен для:
- приема сигналов единого времени для сервера контроля и диагностирования от станционной сети единого времени;
- приема дискретного обобщенного сигнала неисправности комплекса от сервера контроля и диагностирования, усиления и размножения данного сигнала во внешние системы;
- выдачи аналоговых сигналов 0-5 мА в СВРК.
Для обеспечения функций пассивной коммутации информационных и управляющих сигналов в состав ПТК входит отдельный шкаф коммутации сигналов. Кроссовое оборудование ШКС-2 обеспечивает возможность монтажного объединения и размножения сигналов. Структурная схема ПТК СГИУ-И представлена на рисунке 29.
УВС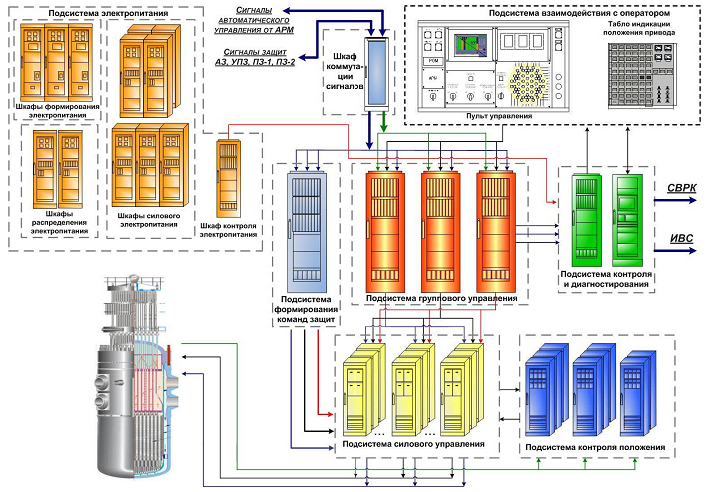
Рисунок 28 – Функциональная схема СГИУ-И

Рисунок 29 – Структурная схема ПТК СГИУ-И