

LABORATORNAYa_RABOTA_1
.docфедеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Забайкальский государственный университет»
(ФГБОУ ВПО «ЗабГУ»)
Энергетический факультет
Кафедра ЭиЭТ
Лабораторная работа №1
ИССЛЕДОВАНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ
ЭЛЕКТРОМАШИННОГО АГРЕГАТА
Выполнил: Студент гр ЭП-13-2
Кибирев А.Г.
Проверил преподаватель:
Шойванов Ю.Р.
Чита 2016 г.
ЛАБОРАТОРНАЯ РАБОТА №1
ИССЛЕДОВАНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ
ЭЛЕКТРОМАШИННОГО АГРЕГАТА
1. Цель работы
1. Экспериментально снять и по результатам обработки экспериментального материала построить механическую характеристику электромашинного агрегата.
2. Объяснить характер полученной кривой.
2. Электрическая схема лабораторной установки;
Рис.
2.1. Электрическая схема лабораторной
установки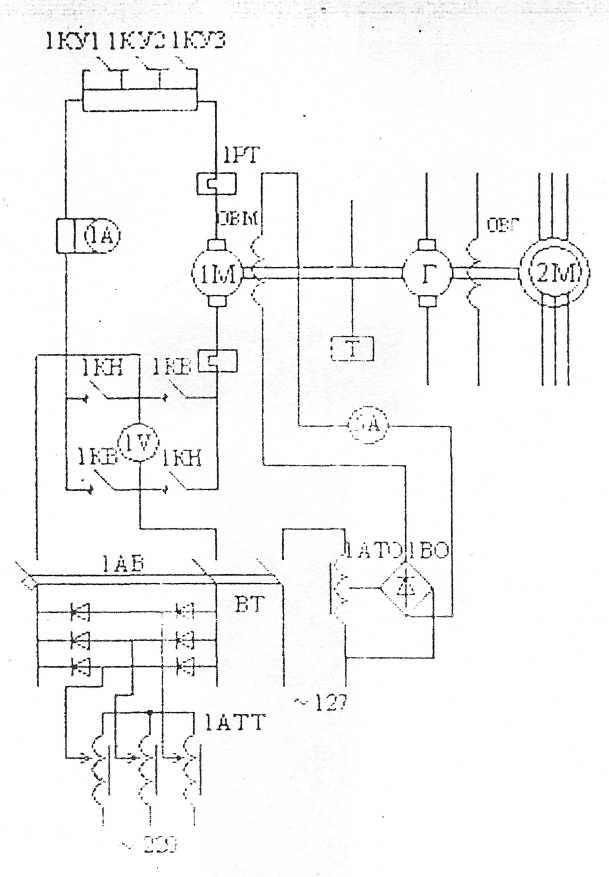 Н
Н
3. Методические указания
Как было показано выше (см. рис 2.1), электромашинный агрегат представляет собой совокупность трех машин 1M, Г, и 2М, механически соединённых одним валом. Включение двигателя 1M при напряжении якорной цепи U выше 15 В вызовет вращение всех трех машин вместе с валом. При этом каждой установившейся угловой скорости вращения вала ω и будет соответствовать условие равенства движущего момента М, развиваемого двигателем 1M, и момента сил сопротивления движению по основному уравнению электропривода:
М = Мс
Так как движение вала осуществляется двигателем 1М при разомкнутой цепи якоря нагрузочной машины Г и отключенном от сети питания двигателе 2М, которые в этом случае будут представлять просто механически вращающиеся массы, то режим работы двигателя 1М близок к режиму холостого хода. Момент сопротивления движению при каждой установившейся скорости будет формироваться силами трения всех трех машин в подшипниках, щеток о коллекторные пластины машин постоянного тока 1M и Г и трения щеток АД с фазным ротором о контактные кольца, а также силами трения вращающихся частей машин и лопаток их вентиляторов о воздух. Обозначив соответственно рассмотренным силам трения моменты сопротивления движению Мсн, Мсщ Мс найдем результирующий момент сопротивления как сумму всех трех составляющих
Мсхх = Мсн + Мсщ + Мс
Моменты сил трения Мсн и Мсщ практически по зависят от скорости вращения вала (исключая режимы малых скоростей, при которых усилие пружин щеткодержателей больше сил касательных к поверхности трения щеток и щетки при переходе с одной пластины коллектора на другую как бы спотыкаются о шероховатости;
Мсн + Мсщ = Мсо
Мсхх = Мсо + Мсв
Момент вентиляционных сил трения имеет, как известно степенную (чаще квадратичную) зависимость от скорости.
Вращающий момент двигателя определяется равен;
М = Рм/ω = Мсхх (Н*М),
где Рм - механическая мощность на валу двигателя, которая с достаточной для практических целей точностью принимается равной электромагнитной мощности, равной
Рм = Р1 - ∆РЭЛ = UI – I2 R (Вт),
где Р1 - мощность, потребляемая якорем двигателя 1M, Вт,
∆ Рэл - мощность электрических потерь в обмотке якоря, Вт,
ω - угловая скорость вращения вала двигателя, рад/с.
Таким образом, определив различные значения М расчетным путем по результатам эксперимента, будем считать, что получим соответствующие значения момента сопротивления, создаваемого электромашинным агрегатом как рабочей машины, а построенная в координатах плоскости кривая ω = f(М) - суть механически характеристика этой рабочей машины.
Следует обратить внимание на определение: механической характеристикой рабочей машины (или двигателя) называется зависимость вида n = f(М) или ω = f(М) Чаще в теории электропривода используется зависимость ω = f(М), поэтому полученную в результате эксперимента величину частоты вращения n, следует пересчитать в величину угловой скорости для каждого эксперимента по формуле:
![]()
4. Таблица измерений
|
№ экс |
n об/мин |
ω рад/с |
U, В |
I, А |
I2·R Вт |
U·I Вт |
Pm Вт |
Мсхх, Н*м |
Примечания |
|
1 |
50 |
5,25 |
25 |
1,08 |
1,05 |
27 |
25,95 |
4,9 |
|
|
2 |
210 |
19,95 |
40 |
1,08 |
1,05 |
43,2 |
42,15 |
10 |
|
|
3 |
380 |
32,025 |
55 |
1,08 |
1,05 |
59,4 |
58,35 |
12 |
|
|
4 |
510 |
46 |
70 |
1,08 |
1,05 |
75,6 |
74,55 |
15,76 |
|
|
5 |
690 |
60,9 |
85 |
1,25 |
1,406 |
106,25 |
104,84 |
17,29 |
|
|
6 |
790 |
80 |
100 |
1,25 |
1,406 |
125 |
123,59 |
18,73 |
|
|
7 |
980 |
89,775 |
115 |
1,33 |
1,592 |
152,95 |
151,36 |
19,59 |
|
|
8 |
1030 |
119,7 |
130 |
1,5 |
2,025 |
195 |
192,98 |
21,42 |
|
|
9 |
1250 |
135,45 |
145 |
1,5 |
2,025 |
217,5 |
215,48 |
22,29 |
|
|
10 |
1410 |
158,55 |
160 |
1,58 |
2,247 |
252,8 |
250,55 |
22,74 |
|
|
11 |
1700 |
178,5 |
175 |
1,6 |
2,304 |
280 |
277,7 |
23,41 |
|
ω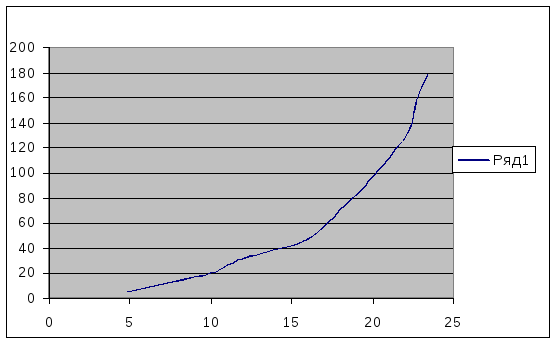
Мсхх