

ЭЛЕКТРИЧЕСКИЙ ПРИВОД Учебное пособие
.pdf221
I экв
I раб |
|
|
длительный режим |
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
1 |
|
ПВ=80% |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПВ=60% |
|
|
|
|
|
|
0,75 |
|
ПВ=40% |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
ПВ=25% |
ПВ=15% |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
кратковременный |
режим |
|
|
||||
|
|
|
|
|
|
||||
0,25 |
|
ПВ=5% |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
tpаб |
0 |
0,1 |
0,2 |
|
0,3 |
|
0,4 |
|
Tн эс |
|
|
|
|
Рис. 7.12 |
|
|
|
|
|
|
Постоянная времени Тн эс как правило приводится в каталогах резисто-
ров (прил. 3), либо указываются допускаемые значения тока через элементы сопротивления для различных значений времени их работы.
7.9.Контрольные вопросы
1.Почему коэффициент полезного действия двигателей с увеличением нагрузки сначала растет, а потом уменьшается?
2.Как рассчитать номинальные потери в электрическом двигателе?
3.Какие способы снижения потерь для машин постоянного и переменного тока сущесатвуют?
4.От каких параметров АД зависит коэффициент мощности?
5.Что такое нагрузочная диаграмма привода?
6.Отличаются ли нагрузочные диаграммы электропривода и производственного механизма?
7.Каковы достоинства дополнительного увеличения махового момента электропривода?
8.Как определить постоянную времени нагрева привода?
9.Какой физический смысл имеет постоянная нагрева?
10.Одинакова ли величина постоянной времени нагрева и охлаждения двигателей?
11.Что входит в состав постоянных потерь электропривода?
222
12.От чего зависят переменные потери электропривода?
13.Какие стандартные номинальные режимы работы электропривода существуют?
14.Чем характеризуется повторно-кратковременный режим работы?
15.Каковы стандартные продолжительности включения?
16.Чем отличается повторно-кратковременный режим работы от кратковременного?
17.В чем заключается условие проверки двигателя по нагреву методом средних потерь?
18.Почему использование проверки двигателя по нагреву методом средних потерь ограничено?
19.Что такое эквивалентные момент, мощность и ток?
20.Как определить мощность двигателя в повторно-кратковременном режиме работы по значению эквивалентной мощности?
21.Что означает коэффициент термической перегрузки?
22.Что означает коэффициент механической перегрузки?
23.Как связаны между собой коэффициенты механической и термической перегрузки, если пренебречь постоянными потерями?
24.В чем заключается условие проверки двигателя на кратковременную перегрузку?
25.От каких величин зависит допустимое число включений в час асинхронного двигателя?
8.ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
8.1.Принципы построения и классификация систем управления
Управление электроприводом включает в себя следующие операции: пуск, торможение, остановку, реверсирование, регулирование каких-либо параметров электропривода. Перечисленные функции обеспечивает наличие в электроприводе системы управления, которая представляет собой совокупность устройств, необходимых для управления каким-либо процессом. Если управление осуществляется без непосредственного участия человека, то система управления называется автоматической. Если отдельные операции управления осуществляет человек, то система называется автоматизирован-
ной.
Если в системе автоматического (автоматизированного) управления задачей управления является обеспечение постоянства или изменение по некоторому закону какой-либо физической величины (температуры, скорости вращения двигателя и т. д.), то ее называют системой автоматического регулирования (САР), которая состоит из объекта регулирования (объекта управления) и регулятора (входит в УУ).
Существует несколько разновидностей САР [12]:
223
1.Системы автоматической стабилизации, обеспечивающие поддержание регулируемой величины на заданном уровне с требуемой точностью, например, система поддержания температуры, система стабилизации скорости РО и др. Системы стабилизации делятся на астатические, обеспечивающие регулирование переменных в установившемся режиме без ошибки, и статические – с некоторой ошибкой.
2.Следящие системы, осуществляющие изменение регулируемой величины во времени по произвольному закону (слежение локатором за целью);
3.Системы программного регулирования, обеспечивающие изменение регулируемой переменной во времени по определенной программе (системы ЧПУ).
4.Системы адаптации, обеспечивающие оптимальное регулирование переменной по заданному показателю качества при изменяющихся условиях работы объекта регулирования. Они делятся на самонастраивающиеся, самоорганизующиеся и самообучающиеся системы.
Типичный пример САР можно рассмотреть на базе автоматизированного электропривода пассажирского лифта:
1) регулирование скорости (следящее, стабилизации и программное управление) – для уменьшения скорости лифта перед остановкой, а также для наладки или ревизии электрооборудования лифта;
2) регулирование положения (системы позиционирования) кабины лифта с заданной точностью;
3) регулирование момента и тока двигателя для обеспечения требуемого ускорения или замедления при пуске или торможении электропривода, а также для ограничения до допустимых значений тока или момента.
Со стороны УУ на объект управления действуют управляющие воздействия, со стороны окружающей среды и сопредельных объектов – возмущающие воздействия. Разомкнутая система электропривода характеризуется наличием влияния на регулируемые координаты возмущающего воздействия. Замкнутые СЭП характеризуются полным (астатическая СЭП) или частичным устранением влияния возмущения (статическая СЭП).
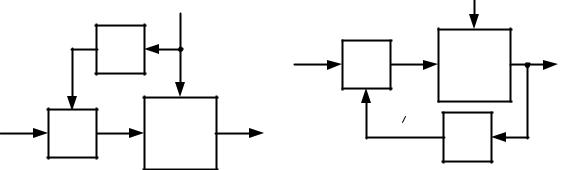
Существует два основных способа построения замкнутых САР – компенсация внешнего возмущения и компенсация отклонения регулируемой величины.
Способ компенсации возмущения осуществляется путем подачи на вход
УУвместе с задающим сигналом X сигнала Xв, содержащего информацию о возмущающем воздействии V. УУ вырабатывает управляющее воздействие U, которое поступает на дальнейшую часть электромеханического канала (ЭМК) СЭП. Из-за отсутствия простых и надежных ИУ таких возмущений эти системы применяются редко.
|
|
|
224 |
|
|
|
|
|
|
V |
|
|
|
V |
|
|
ИУ |
|
* |
|
|
|
|
|
|
X |
U |
ЭМК |
X |
||
Xв |
|
|
УУ |
||||
|
|
|
|
|
|
|
|
X * |
U |
|
X |
|
X |
|
|
УУ |
|
ЭМК |
|
|
ИУ |
|
|
|
|
|
|
|
|||
|
а |
|
|
|
|
б |
|
|
|
|
Рис. 8.1 |
|
|
|
|
Поэтому в большинстве замкнутых СЭП используется способ компенсации отклонения, характеризующийся наличием цепи обратной связи, соединяющей вход и выход СЭП. Управление U вырабатывается на основании
сигнала отклонения заданной величины X от фактического измеренного значения X ′ , т. е. на основании сигнала ошибки регулирования.
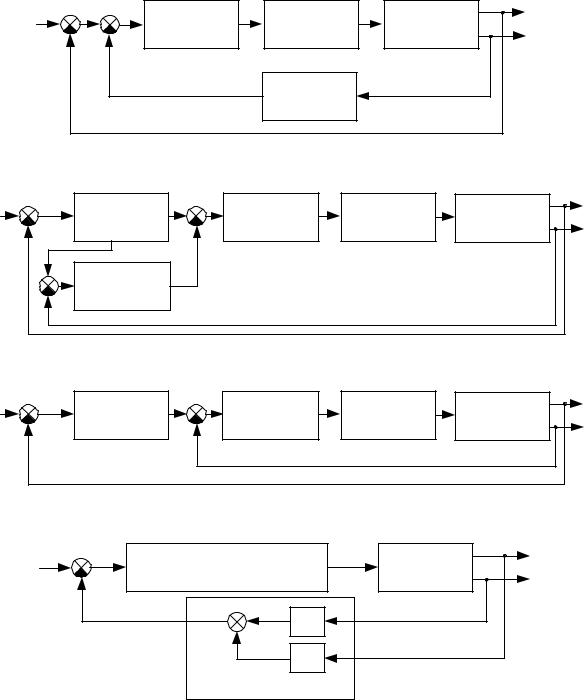
В СЭП применяются несколько принципов построения САР с обратными связями [Терехов]. Рассмотрим некоторые из них на примере регулирования тока и скорости ЭДУ.
Первый принцип. Попеременное регулирование, при котором имеется только один регулятор Р, включаемый попеременно в контур регулирования скорости или контур регулирования тока (рис. 8.2, а).
При токе якоря меньшем заданного напряжение на выходе звена токовой отсечки ТО равно нулю из-за нелинейности его характеристики. В этом режиме система работает как регулятор скорости. Если ток превышает заданное значение, система работает как регулятор тока.
Недостатком этой схемы является то, что одним регулятором невозможно осуществить оптимальное регулирование тока и скорости.
Второй принцип. Параллельное регулирование, при котором выходные величины регулятора скорости (РС) и регулятора тока (РТ) воздействуют попеременно через, усилитель У на ЭПУ (рис. 8.2, б). Для каждой регулируемой координаты применяются отдельные регуляторы, включенные параллельно. Система обеспечивает высокое быстродействие.
Недостатком этой системы является сложность в синтезе и настройке нескольких параллельно-работающих регуляторов.
Третий принцип. Подчиненное (последовательное) регулирование, при котором выходная величина РС является заданием для контура регулирования тока (рис. 8.2, в). При этом сигнал с РС ограничен, что приводит к ограничению тока. Ток и скорость можно регулировать по своим законам, близким к оптимальным. Количество последовательно включенных регуляторов равно числу регулируемых координат.
|
225 |
|
|
|
Р |
ЭПУ |
ЭДУ |
|
ω |
|
i |
|||
|
|
|
|
|
|
ТО |
|
|
|
|
а |
|
|
|
|
|
|
|
ω |
РС |
У |
ЭПУ |
ЭДУ |
i |
РТ |
|
|
|
|
|
б |
|
|
|
|
|
|
|
ω |
РС |
РТ |
ЭПУ |
ЭДУ |
i |
|
в |
|
|
|
|
|
|
|
ω |
|
ЭПУ |
ЭДУ |
|
i |
|
Ki |
|
|
|
|
Kω |
|
|
|
|
МР |
|
|
|
|
г |
|
|
|
|
Рис. 8.2 |
|
|
|
Недостаток состоит в последовательном соединении регуляторов, что |
||||
создает запаздывание тем большее, чем больше контуров. Принцип подчи- |
||||
ненного регулирования получил наибольшее распространение, так как для |
||||
промышленных систем достаточно быстродействия систем подчиненного ре- |
||||
гулирования. Кроме того, они содержат меньшее количество элементов, более |
||||
просты и удобны в настройке, расчете и реализации. |
|
|
||
226
Четвертый принцип. Модальное регулирование МР (рис. 8.2, г), при котором сигналы обратных связей по всем координатам электропривода (даже по тем, регулирование которых не требуется) с необходимыми весовыми коэффициентами суммируются в одной точке, что позволяет получить желаемые характеристики системы относительно регулируемых координат. Этот метод используется для ряда современных регулируемых электроприводов с наличием нескольких входов и выходов, взаимной связи координат и др. К таким электроприводам можно отнести, например, многодвигательные электроприводы роботов и манипуляторов, некоторых подъемно-транспортных машин и т. д.
К недостаткам модального управления можно отнести сложность в ограничении переменных (отсутствие токоограничения) и потребность в большом числе датчиков для измерения всех координат электропривода. Однако он находит применение при синтезе сложных линейных систем электропривода с большим числом переменных и обеспечивает устойчивую работу и требуемые динамические показатели движения рабочего органа.
8.2. Понятие о координатах электропривода и их регулировании
Основная задача электропривода – приведение в движение рабочих органов машин и механизмов и целенаправленное управление этим движением. Для управления движением необходимо регулировать переменные электропривода, которые в пространстве состояний называются фазовыми координатами [12]. Чаще всего регулируемой координатой служит скорость движения. Так, для обеспечения нужного напора в системе водоснабжения следует регулировать скорость насоса. В ряде случаев кроме регулирования скорости следует регулировать момент. Такая необходимость возникает при регулировании ускорения рабочего органа, ограничении момента, например, для исключения обрыва троса при буксировке судна на больших волнах, регулировании натяжения проволоки, укладываемой на катушку и в некоторых других случаях. Частным случаем регулирования является поддержание одной из координат на требуемом уровне при независимом изменении другой координаты. Например, поддержание на заданном уровне скорости движения жилы кабеля в процессе наложения на нее изоляции. Необходимость в регулировании положения рабочих органов в пространстве (позиционирование) возникает в подъемнотранспортных машинах, механизмах подач станков, роботах и манипуляторах, задвижках и др. Эту и другие задачи регулирования координат электропривода невозможно решить без качественного регулирования скорости и момента, которому и посвящены настоящие методические указания.
Регулирование координат в разомкнутых системах электропривода производится, как правило, с помощью формирования требуемых механических характеристик двигателя, из которых одну следует выделять в качестве «основной». Обычно в качестве основной принимают «естественную» характеристику двигателя, соответствующую номинальным значениям опреде-

227
ляющих ее величин (напряжение, частота, магнитный поток и др.). Все другие характеристики, создаваемые в целях регулирования координат, называют «искусственными». Способы регулирования координат в разомкнутых системах электропривода достаточно простые, но качество регулирования, как будет показано ниже, часто не удовлетворяет требованиям технологического процесса. Поэтому там, где необходимо обеспечить, например, высокую точность поддержания регулируемой величины, применяют замкнутые системы электропривода. Как правило, в таких системах применяется регулирование по отклонению координаты от ее заданного значения с помощью обратной связи по регулируемой величине, что обеспечивает требуемую точность независимо от характера возмущающего воздействия.
Для оценки свойств регулируемого электропривода вводится ряд показателей: диапазон, направление, плавность, допустимая нагрузка, экономичность
[6].
Диапазон регулирования D определяется отношением наибольшего X max и наименьшего X min значений координаты электропривода при данном
способе ее регулирования
D = X max
X min
в возможном диапазоне изменения возмущающих воздействий. На рис. 8.3 видно, что одинаковым естественным характеристикам двигателя и изменениям статического момента M c могут соответствовать сильно различаю-
щиеся диапазоны регулирования скорости, что связано с жесткостью искусственных характеристик. С жесткостью характеристик связан также еще один показатель – стабильность (точность) регулирования координат. Для регулирования (стабилизации) скорости требуются жесткие искусственные характеристики (рис. 8.3, а), а для регулирования (ограничения) момента, напротив, нужны очень мягкие характеристики (рис. 8.3, б). Итак, нижний предел регулирования ограничивается допустимой точностью или минимально реализуемыми значениями координаты при данном способе регулирования, а верхний – чаще всего максимально возможными (по прочности, перегрузке и др.) значениями этой координаты. Из рис. 8.3, б следует, что диапазон D сверху ограничен естественной характеристикой, а снизу теоретически не ограничен – искусственная характеристика обеспечивает минимальную угловую скорость ωmin = 0 , поэтому D = ∞ . На практике такой диапазон регули-
рования получить нельзя, так как неучтенные дополнительные возмущения и реально существующие отклонения M c не позволяют получить стабильной
работы электропривода с нулевой скоростью.

|
228 |
|
ω |
ω |
|
|
|
ес |
ωмакс |
ωмакс |
т. х-ка |
|
||
|
ωмин |
и |
|
|
|
|
|
с |
|
|
к |
|
|
х . |
|
|
- |
|
|
к |
ωмин |
M |
а |
M |
||
M с |
|
M с |
а |
|
б |
|
Рис. 8.3 |
|
Направление регулирования определяется расположением искусственных характеристик относительно основной. Если искусственные характеристики расположены только ниже (выше) естественной, то электропривод имеет однозонное регулирование «вниз» («вверх») от основной. Обеспечение расположения искусственных характеристик как выше, так и ниже естественной дает двухзонное регулирование координаты электропривода.
Плавность регулирования характеризуется числом дискретных значений регулируемой координаты в заданном диапазоне D и оценивается коэффициентом плавности
kпл = Xi ,
Xi −1
где X i и X i −1 – значения координаты на двух ближайших i-й и (i-1)-й ступенях
регулирования. При плавном регулировании возможно обеспечить расположение искусственных характеристик как угодно близко друг к другу ( kпл стремит-
ся к единице, а число ступеней m стремится к бесконечности). Наоборот, возможность иметь лишь несколько фиксированных искусственных характеристик обеспечивает ступенчатое регулирование координаты электропривода, а связь
между показателями D , kпл и m выражается зависимостью D = kплm-1 .
Допустимая нагрузка двигателя при регулировании скорости электропривода определяется наибольшей величиной момента, который он способен развивать длительно при работе на любой искусственной характеристике, не перегреваясь. Допустимой нагрузкой двигателя на естественной характеристике является номинальный момент M н. В процессе регулирования скорости
допустимая нагрузка зависит от величины потерь энергии, выделяемых в двигателе, а также от изменяющихся условий его охлаждения. Потери энергии в двигателе в основном определяются потребляемым током. Если принять, пренебрегая изменением теплоотдачи, допустимый ток в силовых цепях при любой скорости равным номинальному Iн , то допустимый момент для при-

229
нудительно охлаждаемого двигателя будет зависеть от магнитного потока Ф на соответствующей искусственной характеристике – M доп º Iн × Ф .
При сохранении магнитного потока Ф = Фн на всем диапазоне регули-
рования скорости при независимом охлаждении двигатель может обеспечивать допустимый момент, равный номинальному:
M доп = M н º Iн × Фн .
Если магнитный поток изменяется, например, ослабляется, то допустимый по условиям нагрева момент уменьшается.
Экономичность регулирования оценивается технико-экономическими расчетами, учитывающими капитальные затраты на реализацию данного способа регулирования (стоимость, массо-габаритные показатели и др.) и эксплуатационные расходы при работе регулируемого электропривода (КПД, cos ϕ ).
Приведенные показатели позволяют сравнивать в главных чертах и сопоставлять различные способы регулирования координат электропривода.
Кроме рассмотренных показателей регулирования существует ряд динамических показателей [14]: величина перерегулирования, статическая и динамическая ошибка, время переходного процесса и др.
Временем переходного процесса tп называется время от начала переходного процесса до момента, когда регулируемая величина x(t) (рис. 8.4) отличается от установившегося значения х(∞) не более заданной величины ∆. Обычно отклонение регулируемой величины от установившегося значения принимают ∆ = 5 %. Время первого достижения установившегося процесса обозначено t1.
Установившееся значение выходной величины х(∞) в общем случае может несколько отличаться от заданного значения хзад.
x(t) |
|
|
xmax |
|
|
xзад |
|
ε |
|
|
|
|
x(∞) |
t := 0, 0.001.. 10 |
|
|
|
|
|
t |
t1 |
|
tп |
|
|
Рис. 8.4 |

230
Статическая точность характеризуется величиной установившейся ошибки:
хз(t) – x(∞) = ε.
Если хз(t) = x(∞), т. е. ε = 0, то система называется астатической. Перерегулирование σ представляет собой динамическую ошибку и оп-
ределяется как относительная величина максимального отклонения от установившегося значения:
σ = хмакс − х(∞) .
х(∞)
Требования к величине перерегулирования могут быть различными в зависимости от конкретного характера системы. Переходный процесс принято считать удовлетворительным, если число перерегулирований за время переходного процеcca не превышает двух [11].
Следует отметить, что динамические показатели обеспечиваются необходимыми настройками САР электроприводов и подробно рассматриваются в учебниках по автоматизированному электроприводу [4, 11, 16].
8.3. Разомкнутые системы управления автоматизированными электроприводами
Рассмотрим основные методы управления электроприводом постоянного и переменного тока в разомкнутых системах. Как было показано ранее, управлять ДПТ можно изменением величины сопротивления якорной цепи Rяц, изменением величины питающего напряжения U или изменением магнитного потока Ф.
Реостатное управление – самый простой и самый неблагоприятный способ регулирования скорости или момента. В якорную цепь двигателя постоянного тока (ДПТ) последовательно включается дополнительное активное сопротивление Rд (рис. 3.5, а).
Если воспользоваться основными показателями регулирования координат, изложенными выше, то получим следующие оценки реостатного способа регулирования:
1)диапазон регулирования скорости невелик и составляет 2-2,5 при изменении нагрузки M с на 40-50%;
2)стабильность скорости низкая, так как жесткость характеристик падает с ростом Rяц: