

ЭЛЕКТРИЧЕСКИЙ ПРИВОД Учебное пособие
.pdf61
величины, меньшей статического момента (характеристика с сопротивлением Rяц ∑ 3 на рис. 3.11, а). Предварительная ступень служит для устранения люф-
тов в передаче и слабины канатов, наличие которых может привести к недопустимо большим динамическим нагрузкам (ударам) при пуске.
Расчет величин сопротивлений пускового реостата двигателя параллельного возбуждения производится в такой последовательности. Исходя из заданного числа пусковых ступеней, плавности пуска и т. д. выбирают значения моментов M1 ( I1 ) и M 2 ( I2 ), а затем строят механические характеристи-
ки (рис. 3.11, а). Поскольку характеристики двигателя параллельного возбуждения прямолинейны, построение их не требует каких-либо расчетов. Если при переходе на естественную характеристику момент двигателя окажется не равным M1 , то, изменив M1 или M 2 , производят построение вновь. После
построения характеристик можно приступить к расчету сопротивлений [3]. Выведем необходимые формулы. Перепад скорости, соответствующий
характеристике с сопротивлением Rяц ∑ 2 и номинальному току двигателя, будет равен:
|
|
|
|
|
|
Δω = |
IнRяц ∑ 2 |
. |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
2 |
|
сE Ф |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Разделив правую и левую части на ω0 , получим |
|
|
|
||||||||||||
|
|
|
Δω2 |
= |
IнRяц ∑ 2 |
= |
IнRяц ∑ 2 |
, R |
= |
Δω2 |
R |
, |
|||
|
|
|
|
||||||||||||
|
|
|
ω0 |
сE Фω0 |
|
|
|
|
яц ∑ 2 |
|
|
н |
|
||
|
|
|
|
Uн |
|
ω0 |
|
||||||||
где R = |
Uн |
– номинальное сопротивление двигателя. |
|
||||||||||||
|
|
||||||||||||||
н |
Iн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Но Δω2 = агμω ; ω0 = адμω , где μω – масштаб скорости. Тогда
Rяц∑ 2 = Rн аг .
ад
По аналогии
R |
= R |
ав |
и R |
= R |
аб |
. |
|
|
|||||
яц ∑1 |
н |
ад |
яце |
н |
||
|
|
|
|
ад |
||
Сопротивление ступени Rдоб2 равно:
62
R |
= R |
− R |
|
= R |
вг |
. |
(3.13) |
|
|
||||||
доб2 |
яц∑ 2 |
яц ∑1 |
н |
ад |
|||
|
|
|
|
|
|
||
По аналогии |
|
|
|
|
|
|
|
|
R |
= R |
бв |
. |
|
|
(3.14) |
|
|
|
|
||||
|
доб1 |
н |
ад |
|
|
|
|
|
|
|
|
|
|
|
|
Как видно из выражений (3.13) и (3.14), сопротивление, выключаемое при переходе с одной характеристики на другую, пропорционально отрезку, заключенному между этими характеристиками при номинальном токе. Используя этот вывод, нетрудно рассчитать сопротивления пускового реостата при любом числе пусковых ступеней.
Рассмотрим также аналитический способ расчета секций пускового реостата. Для этого, необходимо, как и при графическом способе, задаться значениями токов переключения I1 и I2 . Для обеспечения максимального ус-
корения при пуске значение I1 принимают близким к максимально допустимым значениям тока по условиям коммутации:
I1 = λI Iн ,
где λI = 2 ÷ 2,5 – перегрузочная способность по току ДПТ. Современные двигатели (серия ПБСТ) допускают большие перегрузки – λI = 4 .
Значение I2 принимается на 10-50 % больше статической нагрузки:
I2 = (1,1 ÷1,5)Ic .
В начале пуска ДПТ подключается к сети с полностью введенным реостатом Rдоб ∑ . В момент времени, когда ток двигателя станет равным I2 , про-
исходит отключение секции Rдобm (рис. 3.1), что приводит к броску тока до I1 , и ДПТ переходит на следующую механическую характеристику с сопротивлением в якорной цепи Rяц∑ − Rдобm . Далее продолжается отключение сек-
ций пускового реостата и вывод двигателя на естественную механическую характеристику. Из подобия треугольников [4] на рис. 3.11, а можно определить соотношение токов переключения:
λ |
|
= |
I1 |
= |
Rяце + Rдоб ∑ |
= = |
Rяце + Rдоб1 + Rдоб2 |
= |
Rяце + Rдоб1 |
, |
п |
|
Rяце + Rдоб ∑ − Rдобm |
Rяце + Rдоб1 |
|
||||||
|
|
I2 |
|
|
|
Rяце |
||||
|
|
|
|
|
|
|||||

63
то есть сопротивления секций реостата равны
R |
= R |
(λ |
п |
−1) |
, |
R |
= R (λ |
п |
−1)λ |
п |
, … , |
R |
= R |
(λ |
п |
−1)λm-1 |
, (3.15) |
||||||||||
доб1 |
яце |
|
|
|
|
доб2 |
яце |
|
|
|
|
|
|
|
|
добm |
яце |
|
п |
|
|||||||
а также |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Rяце + Rдоб∑ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
λ |
|
= m |
|
= m |
U |
|
, |
|
|
|
|
(3.16) |
||||||||||
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
Rяце |
|
|
|
|
|
I1Rяце |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lg |
Rяце + Rдоб ∑ |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
m = |
|
|
|
Rяце |
|
|
|
, |
|
|
|
|
|
|
|
(3.17) |
||||
|
|
|
|
|
|
|
|
lg λп |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где m – |
число секций (ступеней) пускового реостата. |
|
|
|
|
|
|||||||||||||||||||||
Таким образом, при неизвестном числе ступеней пуска расчет сопротивлений пускового реостата производится в следующем порядке:
1)задаются значениями токов переключения I1 и I2 в соответствии с выше приведенными рекомендациями;
2)определяют предварительное значение λп ;
3)по формуле (3.10) находят необходимое сопротивление якорной цепи Rяц ∑ = Rяце + Rдоб ∑ , удовлетворяющее условиям коммутации при
пуске;
4)рассчитывают ориентировочное число ступеней mо в соответствии с формулой (3.17);
5)округляют число ступеней до целого значения m ≈ mо ;
6)по формуле (3.16) находят новое значение λп ;
7)уточняют значение тока I2 = I1 / λп , которое должно быть больше то-
ка Iс ;
8) находят сопротивления отдельных секций реостата по формулам
(3.15).
Если число секций реостата задано, то выбор моментов переключения зависит от условий пуска. Для нормального пуска без значительных бросков тока (момента) ДПТ задается наименьшее значение тока переключения I2 > Iс и определяется соотношение λп :

64
λ |
|
= m |
U |
= m |
U |
λm+1 |
= |
U |
λ |
|
= m+1 |
U |
||
|
|
|
|
|
|
|
. |
|||||||
п |
|
λпI2 Rяце |
|
п |
|
|||||||||
|
|
I1Rяце |
|
п |
|
I2 Rяце |
|
|
I2 Rяце |
|||||
|
|
|
|
|
|
|
|
|
||||||
Если условие I1 = λпI2 < λI Iн |
выполняется, то производится расчет со- |
|||||||||||||
противления ступеней по формулам (3.15). Иначе, изменяется значение тока I2 и расчет повторяется.
При форсированном пуске наоборот задают максимально возможный пусковой ток I1max ≤ λI Iн и в соответствии с (3.16) определяется соотношение
λп . Затем проверяется условие I2 = I1 / λп > Iс и при его выполнении произво-
дится расчет сопротивления ступеней по формулам (3.15). Иначе, задаются новым значением тока I1 и повторяют расчет.
Расчет сопротивлений пускового реостата двигателей последовательного и смешанного возбуждения представляет некоторую сложность вследствие того, что характеристики этих двигателей не прямолинейны и их невозможно построить до расчета сопротивлений. На примере двигателя последовательного возбуждения рассмотрим один из методов расчета пусковых сопротивлений, пригодный и для двигателей смешанного возбуждения.
Согласно этому методу расчет сопротивлений производится с помощью вспомогательных графиков, показанных во втором квадранте рис. 3.11, б. Каждый из этих графиков представляет собой зависимость скорости двигателя от сопротивления при неизменном токе якоря, т. е. ω( R) , построение кото-
рых осуществляется по уравнению скоростной характеристики (3.11) для максимального I1 и минимального I2 токов.
Поскольку при неизменном токе якоря между скоростью и сопротивлением существует линейная зависимость, для построения каждого из графиков
достаточно найти координаты |
двух точек. Координаты точки б: |
ω = 0 , |
R1 = U / I1 ; координаты точки e: |
R = Rяце , ω = ω1 , где ω1 – скорость на |
естест- |
венной характеристике при токе I1 ; координаты точки а: ω = 0 , R2 = U / I2 ; координаты точки ж: R = Rяце , ω = ω2 .
Для пояснения метода расчета сопротивлений пускового реостата предположим, что скоростные характеристики известны. В первое мгновение после подключения двигателя к сети ω = 0 , ток равен I1 . Этому режиму соот-
ветствует точка б. В процессе разгона двигателя сопротивление цепи якоря остается неизменным – линия бв. При шунтировании сопротивления Rдоб2 ,
ток двигателя возрастает от I2 до I1 . Этому соответствует линия вг, длина которой, очевидно, пропорциональна величине сопротивления Rдоб2 . Подобно этому сопротивление Rдоб1 пропорционально отрезку де. Таким образом, по-
сле построения ломаной линии бв, вг, гд и де сопротивления ступеней пускового реостата определяются относительно просто. Следует иметь в виду, что
65
если в конце построения ломаной линии не попадут в точку е, то необходимо изменить ток I1 или I2 и повторить построение.
Если число секций m пускового реостата задано и требуется определить их сопротивления, то первоопределяющим при этом должно быть значение тока I1 , в соответствии с которым определяется полное сопротивление
якорной цепи Rяц ∑ по формуле (3.10), а затем сопротивление реостата Rдоб∑ .
По формуле (3.9) строится искусственная характеристика с сопротивлением якорной цепи Rяц ∑ . Затем проводят касательные к построенным характери-
стикам в точках к и м до их пересечения в точке и, из которой проводят луч ил (или несколько лучей при m > 2 ) и при определенном токе I2 получают
искомые пусковые диаграммы, аналогичные ДПТ параллельного возбуждения. На основании того, что характеристики ДПТ последовательного (смешанного) возбуждения в области пусковых токов (моментов) имеют высокую жесткость и носят почти линейный характер можно записать:
R |
= R |
кл |
и R |
= R |
лм |
. |
|
|
|||||
доб2 |
доб ∑ |
км |
доб1 |
доб ∑ |
км |
|
|
|
|
|
|||
Ток I2 и положение лучей подбирается так, чтобы пики тока при переключе-
нии были одинаковыми. Этот способ расчета сопротивлений пусковых резисторов удобен тем, что все построения ведутся в одном квадранте. Кроме того, на нем базируется и аналитический способ расчета Rдоб i , основанный на
рассмотрении подобия треугольников (рис. 3.11, б), как при получении формул (3.15) ДПТ параллельного возбуждения.
Аналогично строятся и рассчитываются пусковые диаграммы ДПТ смешанного возбуждения.
3.5. Тормозные режимы работы двигателей постоянного тока
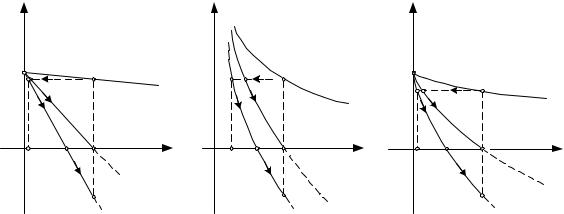
Как уже отмечалось, ДПТ могут работать в тормозных (генераторных) режимах (см. разд. 2.10), необходимых для ограничения скорости привода, находящегося под действием потенциальных сил или снижения скорости вплоть до полной остановки привода. Различают три тормозных режима работы ДПТ: противовключением, рекуперативное и динамическое торможение. В любом из этих режимов ЭДУ, работая по существу генератором, преобразует какой-либо вид энергии, например кинетическую энергию движущихся частей, потенциальную энергию груза и т. д., в электрическую. При работе во всех перечисленных режимах двигатель развивает тормозящий момент, т. е. момент, направленный против скорости вращения.
Под режимом противовключения понимают режим, при котором двигатель, будучи включен в сеть, под действием постороннего момента или
66
запаса кинетической энергии вращается в сторону, противоположную той, в которую он вращался бы при таком же включении в двигательном режиме. Режим противовключения удобно пояснить на примере грузоподъемного механизма, где он может быть использован для опускания грузов.
Допустим, что в схеме двигателя параллельного, последовательного или смешанного возбуждения (рис. 3.1) контакты K1-Km замкнуты, двигатель ра-
ботает на естественной характеристике 0 (рис. 3.12, а-в) и со скоростью ωc при моменте M = M c поднимает груз. Если разомкнуть какой-либо контакт Ki и включить в цепь якоря сопротивление Rдобi , ток якоря и момент двигателя
уменьшатся. Двигатель перейдет при этом на характеристику 1 и в первое мгновение при скорости ωc будет развивать момент M1 . Так как M1 < M c , то
скорость подъема груза начнет уменьшаться, что будет сопровождаться увеличением момента двигателя.
ω |
|
|
|
|
ω |
|
|
|
|
ω |
|
|
|
|
ω0 |
|
|
ωc |
0 |
|
|
|
ωc |
|
ω0 |
|
|
ωc |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
а |
М=Мс |
|
|
|
|
М=Мс |
|
|
а |
М=Мс |
|
|
М |
1 |
б |
М |
М |
1 |
а |
б |
М |
М |
1 |
б |
М |
||
|
|
2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
− ωc |
|
|
|
|
− ωc |
2 |
|
|
|
− ωc |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
а |
|
|
|
|
б |
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
Рис. 3.12 |
|
|
|
|
|
|
Как видно из рис. 3.12, при ωд = 0 момент двигателя меньше M c (точка a). Поэтому под действием момента M c , вызванного силой тяжести груза, якорь двигателя начнет вращаться в противоположную сторону ( ωд < 0 ), а
груз будет опускаться.
Изменение направления скорости приведет к изменению направления индуктированной ЭДС, и следует считать E < 0 . Из формулы
Iя = |
U − E |
= |
U + |
|
E |
|
= |
U + |
|
сE Фωд |
|
|
|||
|
|
|
|
||||||||||||
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Rяце |
+ Rдобi |
|
Rяц ∑ |
|
|
Rяц ∑ |
|||||||||
|
|
|
|
|
|
||||||||||
видно, что при E < 0 ток Iя |
не изменит своего направления, вследствие чего |
||||||||||||||
не изменит направления и момент двигателя. Поскольку скорость и момент

67
направлены в разные стороны ( ωд < 0 , а M > 0 ), двигатель работает в тормозном режиме.
С увеличением ωд в режиме противовключения возрастает E , что
приводит к увеличению тока якоря и момента двигателя. Установившийся режим наступит при скорости ωд = −ωс , при которой M = M c . Скоростные и
механические характеристики (рис. 3.12) двигателей в режиме противовключения подчиняются уравнениям (3.9), (3.11) и (3.12) являются продолжением характеристик двигательного режима и располагаются в IV квадранте, где
ωд < 0 , Iя > 0 и M > 0 .
Изменяя величину сопротивления Rдобi , можно получать различные
скорости опускания груза в режиме противовключения, а также полную остановку привода (точка б на рис. 3.12). Недостатком режима противовключения является то, что характеристики получаются слишком мягкими и скорость в сильной степени зависит от нагрузки двигателя. Так как в режиме противовключения ток и ЭДС якоря совпадают по направлению ( E < 0 , а Iя > 0 ), то
двигатель работает, по существу, в качестве генератора и преобразует потенциальную энергию опускающегося груза в электрическую энергию. Последняя, в свою очередь, преобразуется в тепло в сопротивлениях цепи якоря. В этих же сопротивлениях расходуется и энергия, потребляемая цепью якоря из сети.
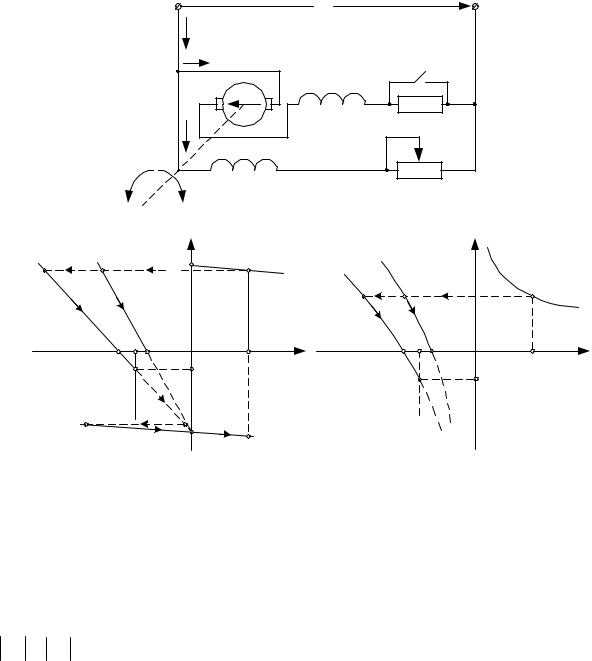
Режим противовключения часто используется для торможения электродвигателей, а, кроме того, возникает при их реверсе. Торможение в режиме противовключения и реверс осуществляются обычно путем переключения полярности напряжения на зажимах якоря двигателя (рис. 3.13, а). Для ограничения тока якоря и момента в режиме противовключения в цепь якоря включено сопротивление противовключения Rпр = Rдоб1 (ключ K1 разомкнут).
После переключения полярности якоря ДПТ переходит из начальной точки работы ωc на естественной характеристике 0 в точку а на новой механической характеристике 1 (рис. 3.13, б и в). Ток якоря изменит свой знак:
I |
|
= |
U − E |
= − |U | −E = − |
U + сE Фωд |
, |
я |
Rяце + Rдоб1 |
|
||||
|
|
Rяц ∑ |
Rяц ∑ |
|||
|
|
|
||||
при этом происходит интенсивное торможение противовключением привода до точки в (рис. 3.13, б и в), благодаря действию суммарного отрицательного динамического момента
M дин = −( сМ ФIя + M с ) < 0 .
|
|
|
|
|
68 |
|
|
|
Если в точке в не отключить ДПТ от сети, то произойдет реверсирова- |
||||||||
ние скорости и при реактивном моменте M c < 0 машина будет работать в ус- |
||||||||
тановившемся двигательном режиме со скоростью ωд = ωср < 0 . Если вклю- |
||||||||
чить в цепь якоря сопротивление Rпр > Rдоб1 , которому соответствует механи- |
||||||||
ческая характеристика 2 (рис. 3.13, б и в), то можно обеспечить остановку |
||||||||
ДПТ (при реактивном M c ) без отключения его от сети (точка г). |
||||||||
|
|
|
|
|
U |
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
Iя |
|
|
|
K1 |
|
|
|
|
Rяц |
|
|
ОВпос |
|
|
|
|
|
|
E |
|
|
|
||
|
|
|
|
|
|
|
||
|
|
Iв |
|
|
Rовпос |
Rдоб1 |
|
|
|
|
|
|
|
|
|||
|
Mд |
|
ОВпар |
|
|
R вдоб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rовпар |
а |
|
|
|
|
|
|
Mс,ωд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
ωc 0 |
|
|
ω |
|
1 |
2 |
ω0 |
|
1 |
2 |
|
|
|
а |
б |
|
|
|
|
б |
|
ωc |
|
|
|
|
|
а |
|
||
|
|
|
|
|
|
|
0 |
|
|
в |
г |
|
М |
|
в |
г |
М |
|
|
|
|
|
||||
|
−Мc |
− ωcр |
Мc |
|
−Мc |
|
Мc |
|
|
|
|
|
|
|
− ωc |
||
|
3 |
д |
|
− ωcа |
|
|
|
|
|
− ω0 |
|
б |
|
|
в |
||
|
|
|
|
|
|
|||
|
|
|
|
Рис. 3.13 |
|
|
|
|
Скоростные и механические характеристики двигателей в режиме тор- |
||||||||
можения противовключением подчиняются уравнениям (3.9), (3.11) и (3.12) |
||||||||
если положить в них U < 0 , а в уравнении (3.9) также и ωe |
< 0 . |
|||||||
Под генераторным режимом с отдачей энергии в сеть понимают ре- |
||||||||
жим, при котором двигатель, будучи подключенным к сети, под действием |
||||||||
внешнего момента или запаса кинетической энергии вращается со скоростью |
||||||||
ωд > ω0 |
в ту же сторону, |
в которую он вращался бы при таком же включе- |
||||||
нии в двигательном режиме. Генераторный режим возникает, когда в двига- |
||||||||
тельном режиме статический момент оказывается направленным по скорости. |
||||||||
Это может быть, например, на механизмах передвижения кранов при возник- |
||||||||
новении сильного попутного ветра. Предположим, что двигатель параллель- |
||||||||
69
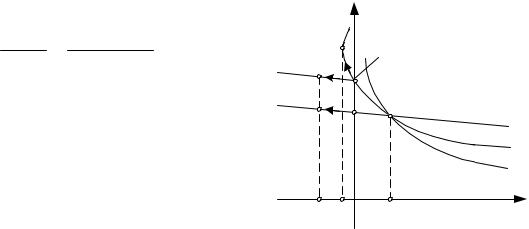
ного возбуждения, включенный по схеме, изображенной на рис. 3.1, приводит в движение грузовую тележку и при работе в двигательном режиме на естест-
венной характеристике развивает момент M = M c и скорость ωc |
(рис. 3.14). |
|||||
Момент сопротивления M c вызван силами трения. |
|
|
||||
Ток якоря двигателя |
|
ω |
|
|
||
|
|
|
|
|
|
|
Iя |
= U − E = U − сE Фωд . |
4 |
ω |
ω03 |
|
|
|
R |
R |
|
|
||
|
яце |
яце |
|
с4 |
|
|
При |
работе |
электродвигателя в |
|
ωс1 |
ωc |
|
|
|
1 |
||||
двигательном режиме ωд < ω0 , вследст- |
|
|
ω01 |
|||
|
|
|
3 |
|||
вие чего |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
−Мc |
|
|
E = сE Фωд < сE Фω0 = U ; |
|
|
|
|||
|
−М1 |
Мc |
М |
|||
|
|
|
|
|||
а также Iя > 0 и M > 0 . Если в направ- |
|
|
Рис. 3.14 |
|
||
лении движения начнет действовать ве-
тер, то момент M c будет обусловлен силами трения и действием ветра. При некоторой силе ветра момент M c изменит направление и из тормозящего пре-
вратится в движущий. В этом случае его следует считать отрицательным M c < 0 . Тогда под действием момента −M c и момента двигателя скорость
начнет возрастать. В результате этого будут увеличиваться ЭДС и уменьшаться ток якоря и момент двигателя. При ωд = ω0 (характеристика 1 на
рис. 3.14) получим E = U , Iя = 0 и M = 0 . Однако под действием момента −M c будет происходить дальнейшее увеличение скорости. При ωд > ω0 ока-
жется, что E > U , в результате чего ток якоря и момент двигателя изменят направления и следует считать Iя < 0 и M < 0 . Поскольку момент в данном
случае будет направлен против скорости ( ωд > 0 , а M < 0 ), то двигатель бу-
дет работать в тормозном режиме. По определению режим этот является генераторным, так как якорь вращается со скоростью ωд > ω0 в ту же сторону,
что и в двигательном режиме, но преобразует механическую энергию в электрическую.
Механические и скоростные характеристики генераторного режима подчиняются уравнениям (3.5), (3.6), (3.11) и (3.12) и являются продолжением характеристик двигательного режима во II квадранте, где ω > ω0 ; Iя < 0 и
M < 0 . Под действием момента скорость будет возрастать до ωc1 , при которой наступит равенство M = −M c . Если в цепь якоря включать дополнительные сопротивления, можно регулировать скорость в генераторном режиме.

70
При работе в генераторном режиме ЭДС и ток якоря по направлению совпадают ( E > 0 , а Iя < 0 ), что свидетельствует о работе двигателя в качест-
ве источника. Одна часть вырабатываемой энергии двигателя расходуется в сопротивлениях цепи якоря, другая отдается в сеть постоянного тока.
Генераторный режим широко используется для тормозного спуска грузов. Он возникает, когда двигатель включается в сеть так, что его момент в двигательном режиме направлен в сторону опускания груза. В начале процесса спуска груза для ограничения тока (момента) в якорную цепь вводится дополнительное сопротивление ( Rдоб1 на рис. 3.13, а) и двигатель работает на
характеристике 1 от точки в до точки д (рис. 3.13, б). Затем двигатель переключается на естественную механическую характеристику 3. Механическая характеристика двигателя расположена в III квадранте, где ωд < 0 и M < 0 .
Так как в двигательном режиме момент двигателя и активный момент M c направлены согласно, то установившегося режима в III квадранте наступить не может. При ω д > −ω0 двигатель переходит в генераторный режим и его момент оказывается направленным против скорости и момента M c . Установившийся режим наступит при скорости ωд = ωса < 0 , при которой M = M c . Ес-
тественно в таком тормозном режиме невозможно остановить механизм. Преимуществом генераторного режима является его экономичность:
энергия не только не потребляется из сети, но, наоборот, отдается в сеть. Двигатель параллельного возбуждения имеет в генераторном режиме жесткую естественную характеристику, благодаря чему скорость при изменении нагрузки изменяется незначительно. Серьезным недостатком генераторного режима является то, что регулирование скорости возможно лишь в области, расположенной выше естественной характеристики, и пониженных скоростей получать нельзя.
Двигатель последовательного возбуждения при его обычной схеме включения работать в генераторном режиме с отдачей энергии в сеть не может. Действительно, генераторный режим с отдачей энергии в сеть может возникнуть, когда E > U , что возможно, если ωд > ω0 . Поскольку у двигателя
последовательного возбуждения ω0 = ∞ , то работа двигателя в генераторном
режиме исключается.
При работе в генераторном режиме двигателя смешанного возбуждения сериесная обмотка размагничивает двигатель и при некотором токе Iя1 < 0
(см. рис. 3.2, а) оказывается, что Ф = 0 . Как следует из уравнения
ω = |
U − IяRяце |
, |
|
e |
сE |
Ф |
|
|
|
||