

лекция 5_конспект
.pdfТочность навигацио нных определений
П = ГП И ,
где
– погрешность определения пространственных координат потребителя;
ПП – погрешность определения просстранственных координат
Г – пространственный геометрический фактор (взаимное расстояние между КА).
потребителяП ;
ГППространственный– пространственныйгеометрическийгеометричесфакторкий– этофактормера ошибки. определения координат,
которая тем меньше, чем больше расстояние между КА, расстояние до которых измеряется.
То есть если определять координаты по спуутникам, расположенным на небесной сфере близко друг к другу, ошибка будет больше.
где
R, L, N
t
KR, KL, KN, Kt
–среднеквадратическая поггрешность эфемерид КА по радиус-вектору (R), вдоль орбиты (L), поперек орбиты (N);
–среднеквадратическая поггрешность ухода времени КА относительно общесистемного времени;
–коэффициенты трансформации.
Коэффициенты трансформации – это числовые коэффициенты, необходимые для увязки в одной формуле разных единиц измерения: длины ( R, L, N ) и времени ( t ).
11
Радионавигационные сигналы
Навигационный сигнал со спутникка должен удовлетворять двум условиям:
обеспечивать требуемую точность измерений навигационного параметра;
обеспечивать передачу наввигационной информации (координаты, скорость движения спутника, оцифровку шкал времени и др.) за приемлемое время.
Мощность навигационного сигнала:
где
 – среднеквадратическая погррешность измерения дальности;
– среднеквадратическая погррешность измерения дальности;
с – скорость света;
 – тактовая частота приемника;
– тактовая частота приемника;
– отношение мощности шума к мощности сигнала.
Мощность навигационного сигнала влияеет на точность навигационных определений,
однако мощность сигнала влечёт за собой повышение требуемой энергетики космического аппарата, то есть увеличение площади солнеечных батарей КА, что негативно сказывается на стабильности орбитального движения спутника – увеличение площади солнечных батарей ведёт к увеличению влияния на движеение КА сил светового и теплового давления.
Вместе с тем, требование по количеству информации в навигационном сигнале определяет использование сигнала достаточчно высокой частоты (L- и S-диапазон), что также требует определённой мощности (а, значит, и площади) солнечных батарей.
12
Идентификация радионавигационных сигналов
Способы разде ления сигналов
Временная |
Структурная |
селекция |
селекция |
излучение
кодовое разделение
навигационного
сигналов
сигнала данного КА в выделенном временном интервале
Пространственная |
Частотная |
|
селекция |
селекция |
|
приём сигнала потребителем на |
излучение сигналов |
|
остронаправленную антенну, |
||
каждого КА на |
||
либо разнесение КА с одинаковыми |
||
разнесённых частотах |
||
параметрами сигнала по орбите |
||
|
Способы разделения сигналов опредделяются логикой работы и эволюцией навигационных систем. Поскольку космическая навигация основана на определении расстояния до спутника с заранее известным и параметрами движения, а для того, чтобы использовать эти известные параметры движения, надо точно знать, расстояние до какого спутника измеряется в данный момент времени, необходимо разделять сигналы навигационных КА.
Самым логичным разделением является частотная селекция, однако сигналы разной частоты по-разному задерживаются атмосферой Земли и поэтому ошибки в определении расстояния для каждого КА будут разными, что ухудшает точность навигационной системы.
При временной или пространственной селекции все КА навигационной системы работают на одной частоте, идентификация КА осуществляется либо перенацеливанием антенны, либо уникальным временем появленния в зоне видимости потребителя каждого КА системы (сейчас пролетел над головой один КА, через 10 минут – другой, но не два одновременно).
Наиболее эффективным является кодовоое разделение, когда сигналу каждого КА из множества работающих на одной частоте присваивается уникальный код, позволяющий аппаратуре потребителя «не слышать» сигналы остальных КА при работе с данным спутником.
13
Навигационный радиоси гнал системы ГЛОНАСС
Типы сигналов
L1 (1591-1610 МГц) |
L2 (1240-1256 МГц) |
L3 (1199-1216 МГц) |
частотное разделение |
частотное разделение |
кодовое разделение |
(12 литер) |
(12 литер) |
(30 адресов) |
Для системы ГЛОНАСС используются 12 литер частотного разделения сигналов, то есть существуют 12 пар спутников с одинаковыми частотами навигационных сигналов.
Несмешиваемость сигналов обеспечивается за счёт пространственного разнесения КА:
спутники с одинаковыми частотами устанавливаются на орбитах под углом 180° друг
относительно друга, то есть когда один спутник находится над потребителем, другой спутник
с такой же частотой навигационного сигнала находится над другим полушарием Земли и потребителю не может быть виден.
Структура |
навигационного |
сообщения |
Строка (2 с)
цифровая инфформация и метки времени
Кадр (15 стр ок, 30 с)
Суперкадр (5 кадров, 2.5 мин)
Вся необходимая для определения координат информация заключена в строке навигационного сообщения диной 2 секунды (время, за которое сигнал может быть полностью принят аппаратурой потребителя). Для надёжности передачи информации строка дублируется 14 раз, 15 строк собираются в кадр и формируется суперкадр из пяти кадров.
14

Синхронизация шкалы времени КА
Суточная относительная нестабилльность частоты f / f 0 = ( f 1 - f 0 ) / f 0
Кварцевые стандарты (1...5) 10-10 .
Атомные стандарты до 1 10-13...1 10-14;
Водородные стандарты до 3 10-16.
Сверка времени – измерение дальности до КА и времени распространения сигнала.
Коррекция шкалы времени КА:
Смещение шкалы времени КА.
Закладка поправок к шкале времени КА.
Для обеспечения одинакового времени на всех КА навигационной орбитальной группировки используются бортовые часы – стандарты частоты. Поскольку частота – это количество колебаний за единицу времени, волна определённой частоты может использоваться для измерения времени, требуется только, чтобы эта волна была достаточно стабильной.
Однако нестабильность (вследствие разных факторов) присутствует, поэтому необходима периодическая (не реже одного раза в сутки) сверка бортовых часов КА со стандартом частоты, расположенном в ЦУС и являющимся эталонным для всех КА системы
(системным временем). В результате сверки на борт КА закладываются поправки времени,
то есть потребителю сообщается бортовое время и расхождение этого времени с системным. При накоплении погрешности и достижении её величины порогового уровня,
проводится коррекция шкалы времени (бортовые часы принудительно устанавливаются по системному времени).
15
Бортовой источник навигационного сигнала
L1, L2 |
– |
частотный диапазон; |
РФ |
– |
режекторный фильтр; |
|
ФНЧ |
– |
фильтр низких частот; |
БД |
– |
блок делительный; |
|
УМ L1, |
– |
усилители мощности; |
1…12 |
– |
излучатели антенной решётки. |
|
УМ L2 |
||||||
|
|
|
|
|
Навигационный сигнал излучается с помощью фазированной антенной решётки кругового типа. Два передатчика формируютт два сигнала на двух частотах, после чего каждый из сигналов делится и направляется на каждый из излучателей антенной решётки.
16
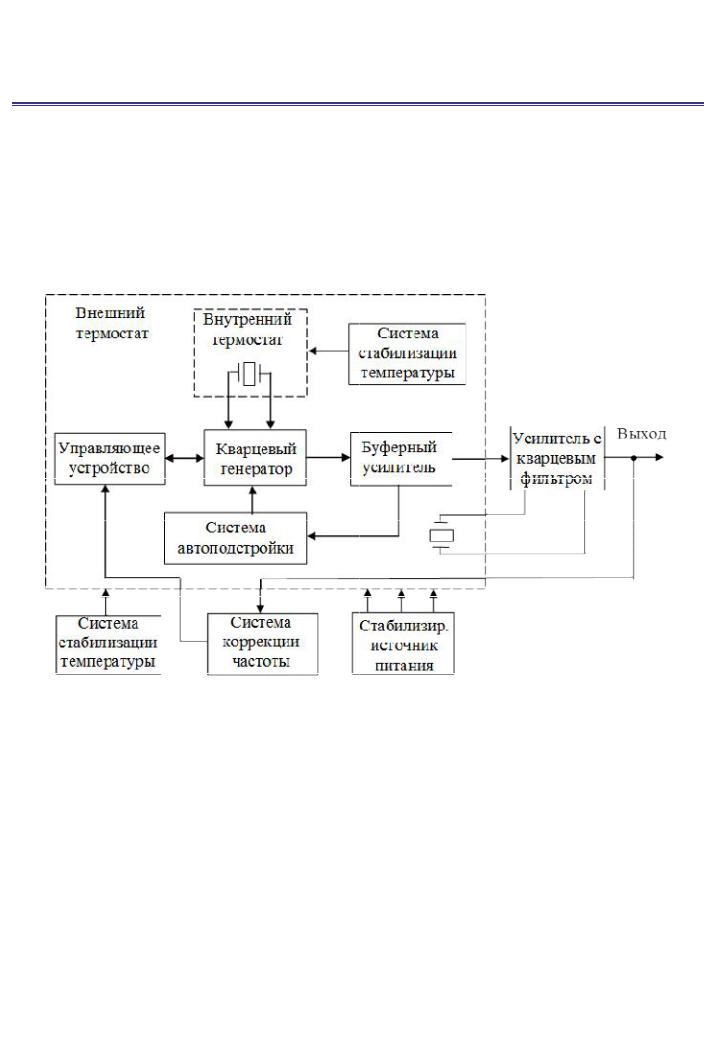
Кварцевый ген ератор частоты
Измерять на борту абсолютное время не имеет смысла, поскольку в любой момент можно по команде с Земли привязать бортовое время к любому часовому поясу. Интерес представляет промежуток времени, прошедший с момента последней подстройки времени до момента излучения навигационного сигналаа. Эти промежутки можно измерить с помощью различных генераторов частоты. Например, ессли сигнал имеет частоту 1 Герц, это означает, что он совершает одно колебание в секунду. Частота 5 МГц соответствует пяти миллионам колебаний в секунду. Отсчитывая количество колебаний, произведённых сигналом генератора частоты с момента установки бортового времени в «ноль» и зная частоту этих колебаний, можно определить текущее бортовое время КА.
На спутниках кварцевые генераторы применяются как самостоятельные генераторы стабильной частоты 5 МГц для приемников и для передатчиков, а также для формирования шкалы времени БКУ. В атомных стандартах частоты кварцевые генераторы используется в конттуре автоподстройки.
Внешнее напряжение на кварцевой пласстинке вызывает её деформацию, которая, в
свою очередь, приводит к появлению электрического заряда на поверхности кварца
(пьезоэлектрический эффект). В результате этого механические колебания кварцевой пластины сопровождаются синхронными с ними колебаниями заряда на её поверхности, и
наоборот. Эти колебания отличаются достаточно высокой стабильностью и могут быть использованы для определения времени на боорту космического аппарата.
17
Атомный стандарт частоты
Работа атомного стандарта частоты основана на использовании явлений резонансного поглощения (пассивная схема) или излучения (активная схема) энергии квантов атомами, молекулами, ионами. Работа генератора направлена на то, чтобы выделить частицы со строго определённым уровнем энергии, которые генерируют сигнал строго определённой чаастоты.
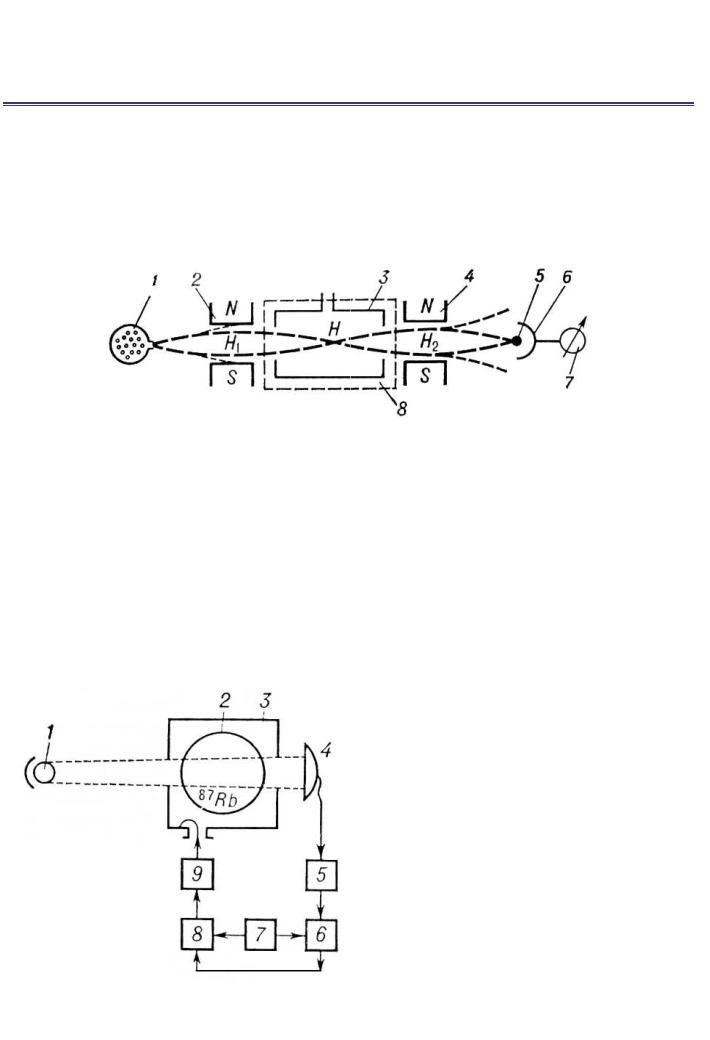
Цезиевый стандарт частоты
1 |
находящийся в постоянном и однородном |
5 |
пунктиром). |
магнитном поле Н; |
|||
– источник пучка Cs; |
– раскалённая вольфрамовая проволока; |
||
2 |
и 4 – отклоняющие магниты, создающие |
6 |
– коллектор ионов Cs; |
|
неоднородные магнитные поля H1 и H2; |
7 |
– измерительный прибор; |
3 |
– объёмный резонатор, в котором |
8 |
– область постоянного однородного |
|
возбуждаются электромагнитные волны, |
||
|
|
|
магнитного поля Н (ограничена |
Рубидиевый стандарт частоты
1 – лампа, освещающая колбу 2, наполненную парами 87Rb;
3 – объёмный резонатор;
4 – фотодетектор;
5 – усилитель низкой частоты;
6 – фазовый детектор;
7 – генератор низкой частоты;
8 – кварцевый генератор;
9 – умножитель частоты
18
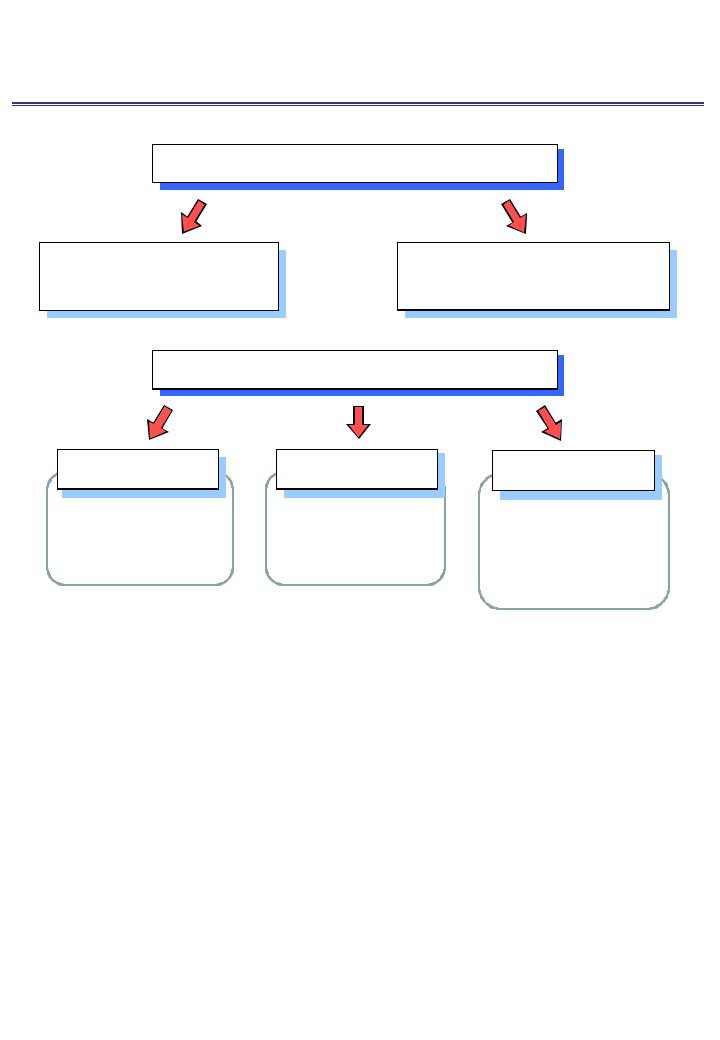
Эфемеридное обеспечение КА
ЗАД АЧИ
Измерения |
Прогнозирование |
параметров орбиты КА |
параметров орбиты КА |
Способы решения
Неавтономный |
Автономный |
Комбинированный |
|
||
запросный и |
межспутнниковые |
сочетание |
беззапросный |
измерения |
неавтономных и |
|
|
автономных способов |
Эфемеридное обеспечение – это определение параметров орбиты навигационных КА и прогноз их движения по орбите.
Классическим способом измерения орбиты навигационного КА является постоянный контроль расстояния от КА до каждой из сети наземных станций наблюдения. Однако в море, например, таких станций не поставвишь, поэтому межспутниковые измерения,
проводимые по алгоритму «измерение расстояния от искомого КА до ближайшего КА» -> «измерение расстояния от ближайшего КА до наземной станции» -> «определение расстояния до искомого КА», помогают повысить точность навигационных определений в регионах, где сеть наземных пунктов редкая илли вообще отсутствует.
19

Водородный стандарт частоты
1 — источник атомного пучка;
2 — сортирующая система (многополюсный магнит);
3 — резонатор;
4 — накопительная колба.
Водородный стандарт частоты являетсяя самым стабильным из существующих на сегодняшний день. Это связано с тем, что атом водорода состоит из всего двух заряженных частиц: электрона и протона. Соответственно, ошибки, когда вместо частицы с одним уровнем энергии стандарт частоты выделяет частицу с другим уровнем энергии, исключены по определению. Единственным недостатком водородных стандартов частоты является малая мощность излучения: для того, чтобы заарегистрировать сигнал , необходимо накопить некое минимальное количество заряженных частиц, то есть работа такого стандарта частоты отличается высокой инертностью. После запуска должно пройти некоторое время,
прежде чем в накопительной колбе окажется достаточное количество заряженных частиц и с помощью этого прибора можно начать регисттрацию времени.
20