

лекция 5_конспект
.pdfЛекция 5 Космические навигационные системы
Космическая навигация, которая сегодня прочно вошла в жизнь человека посредством различных устройств определения координат и скорости – как космических и авиационных, так и автомобильных навигаторов, а также навигационных приложений в сотовых телефонах и GPS-трекеров в ошейниках собак – как технология организовалась достаточно поздно, позже всех современных глобальных космических технологий.
Первые навигационные спутники были разработаны в США в рамках программы определения координат точки пуска межконтинентальных баллистических ракет с подводных лодок. В эксплуатацию эта система, получившая наименование Transit, была принята в 1964 году. В СССР аналогичная систтема, Циклон, начала функционировать в 1976 году.
Активное гражданское применение навигационных космических систем началось в 1983 году после того, как в районе Сахалина был сбит потерявший ориентацию в пространстве пассажирский самолёт. Сегодня национальные космические навигационные системы имеют пять стран: США, Россия, Европейский союз, Китай и Индия.
СПИСОК СОКРАЩЕНИЙ
БКУ – бортовой комплекс управления;
ГСО – геостационарная орбита;
КА – космический аппарат;
НАП – наземная аппаратура потребителя;
ННЦ – наземный навигационный центр;
ПРМ – приёмник.
1

Спутниковая радионавигация
Навигация – это наука о способах выбора пути
Задачи навигации: нахождение безопасного и выгодного маршрута, определение местоположения, направления и значения скорости, а также других параметров движения.
Методы навигации
Оптическая навигация по небесным светилам
Радионавигация по наземным
(традиционная)
станциям (традиционная)
Спутниковая радионавигация (совремменная)
К задачам навигации издревле относили определение текущего местоположения наблюдателя с целью прокладки требуемого курса. Традиционная навигация (по небесным светилам – Солнцу и звёздам – включала в себя исключительно измерения углового положения светил в определённое время, что давало наблюдателям информацию как о их текущем местоположении, так и о ориентации сторон света относительно наблюдателя. Недостатком этого типа навигации являлась зависимость от погоды: если небо закрыто облаками, звёзд видно не будет.
Радионавигация по наземным станциям использует принцип зависимости затухания радиосигнала от пройденного сигналом рассстояния. Этот тип радионавигации широко использовался при прокладке морских маршррутов, когда с помощью измерения мощности сигнала от каждой станции определялось расстояние до них, а зная расстояние между станциями и направление на них, можно было построить треугольник, однозначно определявший местоположение корабля в море. Недостатком этого метода являлось большое требуемое количество наземных станций, а также ухудшение точности определения координат при большом удалении от берега: чем дальше от наземной станции, тем слабее сигнал и тем сильнее на его мощноость влияют дополнительные факторы.
Спутниковая радионавигация по своей сути идентична радионавигации по наземным станциям, только в качестве источников навигационного сигнала выступают космические аппараты, расположенные на круговых орбитаах Земли. Особенностью этого типа навигации является необходимость синхронизации бортоового времени каждого космического аппарата с каждым, что представляет достаточно сложную техническую задачу.
2
Преимущества спутникковой радионавигации
ГЛОБАЛЬНОСТЬ
ДОСТУПНОСТЬ
ОПЕРАТИВНОСТЬ
Охватывает всю поверхность Земли, околоземное Воздушное и космическое пространство
Возможность надежного навигационного обеспечения потребителя при любой погоде, независимо от времени года и суток
Возможность выполнения навигационных наблюдений за короткое время
БОЛЬШАЯ
ИНФОРМАТИВНОСТЬ
ВЫСОКАЯ
ТОЧНОСТЬ
Обеспечение определения полного вектора параметров движения (местоположения, направления и значения скорости), поправки времени и т.д.
Точность определения координат – менее 1 метра, относительной скорости – порядка 0,1 км/ч, или 0,5%
Преимущества спутниковой радионнавигации определяются размещением навигационных КА в зоне прямой радиовидимости любого из потенциальных потребителей. При этом чем выше орбита навигационного КА, тем больше его зона видимости и тем меньше требуется спутников для обеспечения глобального покрытия.
Использование радиосигналов определяет всепогодность и непрерывность функционирования таких систем: облака не являются помехой для прохождения навигационных сигналов.
Нахождение в поле зрения абонента одновременно большого количества навигационных КА (вследствие большой высоты орбиты последних) определяет оперативность получения информации о кооординатах абонента, поскольку необходимые вычисления могут быть произведены мгновеннно.
Движение космических аппаратов по орбите позволяет вычислять не только координаты, но и скорость движения абонента, используя эффект доплеровского сдвига частот.
Использование множества одинаковых навигационных КА с модернизированной целевой аппаратурой позволяет добиться беспрецедентных, по сравнению с другими навигационными методами, точностей навигационных определений.
3

Общая классификация способов организации спутниковой р адионавигации
а) пассивный с самоопределением |
б) активный с иноопределением (ННЦ) |
в) активный с иноопределением (КА) |
г) активный с иноопределением (ННЦ) |
ННЦ - наземный навигацционный центр НАП – навигационная аппаратура потребителя
Спутниковая радионавигация может быть организована двумя основными способами: пассивным, когда аппаратура потребителя не излучает никакого сигнала, а только принимает сигнал от навигационного КА и, при необходимости, от наземного навигационного центра (ННЦ), и активным, когда аппаратура потребителя сама генерирует навигационный сигнал, который в дальнейшем обрабатывается на борту КА или в ННЦ.
Пассивный способ сегодня является оссновным для широкого круга потребителей навигационной информации, поскольку позвволяет минимизировать сложность бытовых навигационных приёмников.
Активные способы организации спутниковой радионавигации можно условно разделить на три группы:
потребитель излучает навигационный сигнал, который через спутник передаётся на ННЦ, там обрабатывается и используется (для случаев, когда потребитель – автоматическое оборудование, а координаты его нужны тольько в ННЦ);
навигационный сигнал потребителя обрабатывается на КА с использованием информации от ННЦ;
сигнал потребителя обрабатывается в ННЦ и результаты вычислений сообщаются потребителю через канал связи навигационного КА.
4
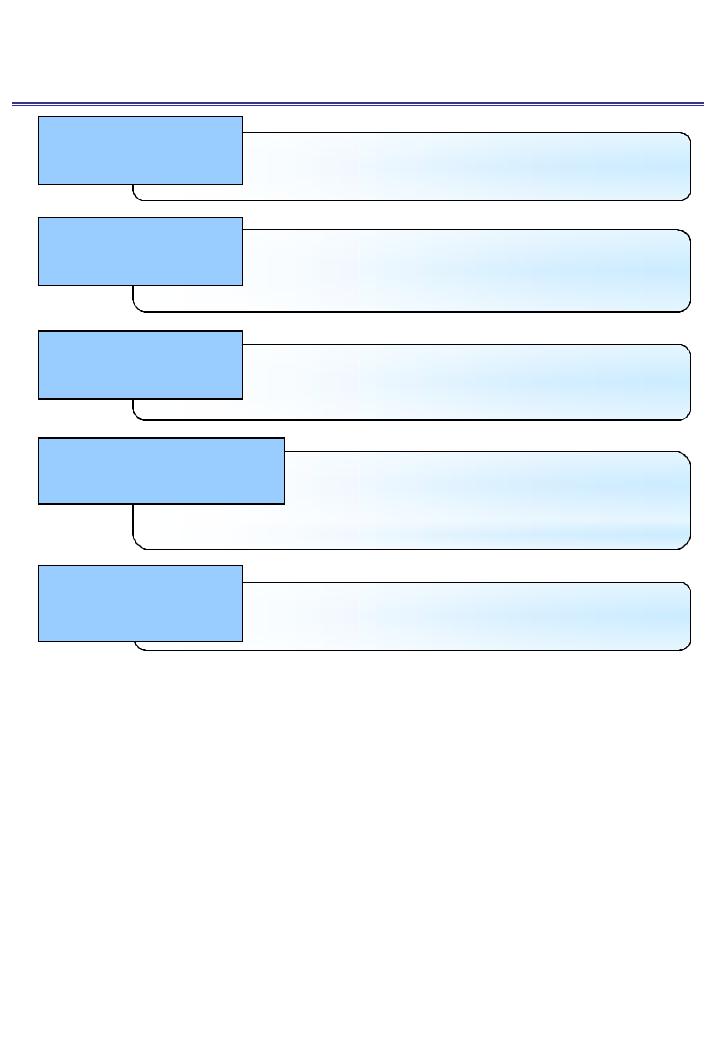
Доплеровские космические навигационные системы
ИТНП – измерения текущих навигационных параметров движения КА,
ТМИ |
– телеметрическая информация, |
ЭВИ |
– эфемеридно-временная информация, |
КПИ |
– командно-программная информация, |
РК |
– радиокоманды, |
tИСЗ |
– оцифрованная шкала времени спуутника |
Доплеровский метод определения коордиинат основан на измерении дальности между потребителем и навигационным КА за счёт исследования доплеровского сдвига навигационного сигнала, излучаемого КА, при условии, что известна траектория движения КА, а также несущая частота навигационного радиосигнала. Другими словами, измеряется относительная скорость потребителя и несколльких навигационных КА, после чего делается вывод о координатах и абсолютной скорости движения потребителя.
Этот метод отличается необходимостью использования низких орбит (для того, чтобы относительные скорости КА-потребитель быыли максимальными и вклад ионосферного сдвига частот в смещение несущей частоты сигнала был минимальным), что определяет большое количество космических аппаратов в орбитальной группировке навигационных КА и малое время видимости одного КА.
5
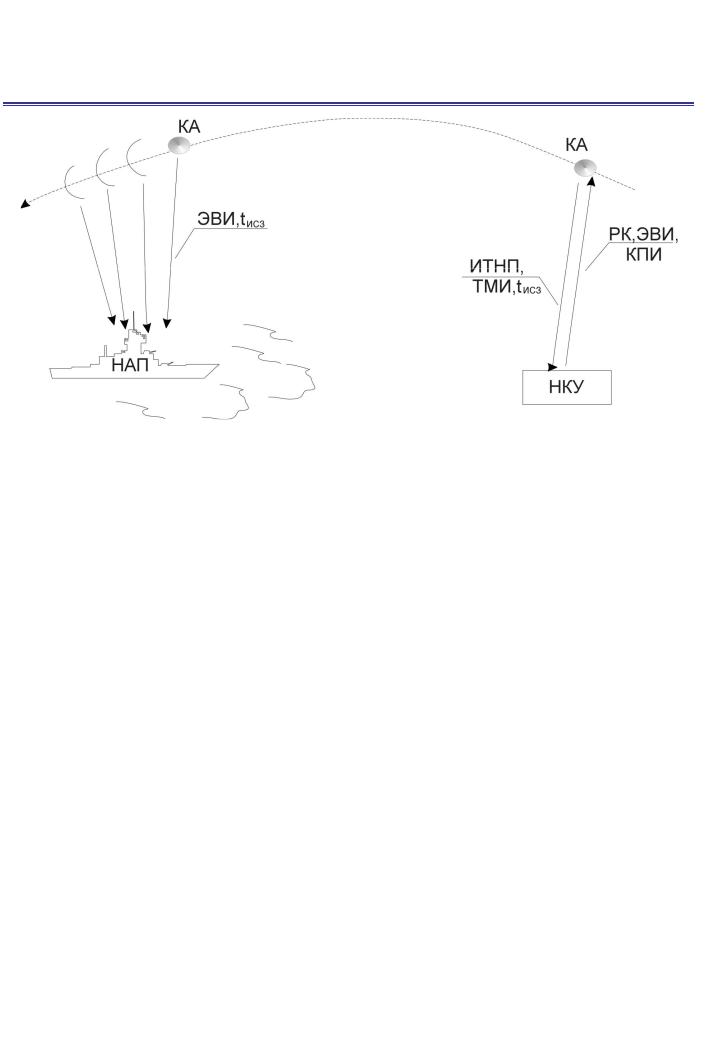
Разностно-дальномернаяя спутниковая навигация
Разностно-дальномерный метод спутниковой навигации основан на определении дальности до каждого навигационного КА из формулы Дальность=скорость × время. Зная,
что радиоволны распространяются со скоростью света, замеряют время, за которое сигнал,
посланный с борта навигационного КА, дошёл до потребителя, и получают дальность до этого КА. Измерив дальность только до одного КА, можно сказать, что потребитель находится где-то на поверхности сферы с центром в центре масс навигационного КА и радиусом, равным измеренной дальности. Измерив дальность до двух КА, уменьшают область нахождения потребителя до линии пересечения двух сфер – до окружности. Три сферы дают две точки, одна из которых гарантированно находится вне поверхности Земли,
и её можно исключить. Для повышения точности и для исключения ошибки, вызванной расхождением бортовых часов навигационных КА, разностно-дальномерные измерения должны проводиться как минимум по четырёём КА – в этом случае, если часы какого-то спутника отстают от других, измеренная по нему дальность может быть усреднена по остальным спутникам.
6
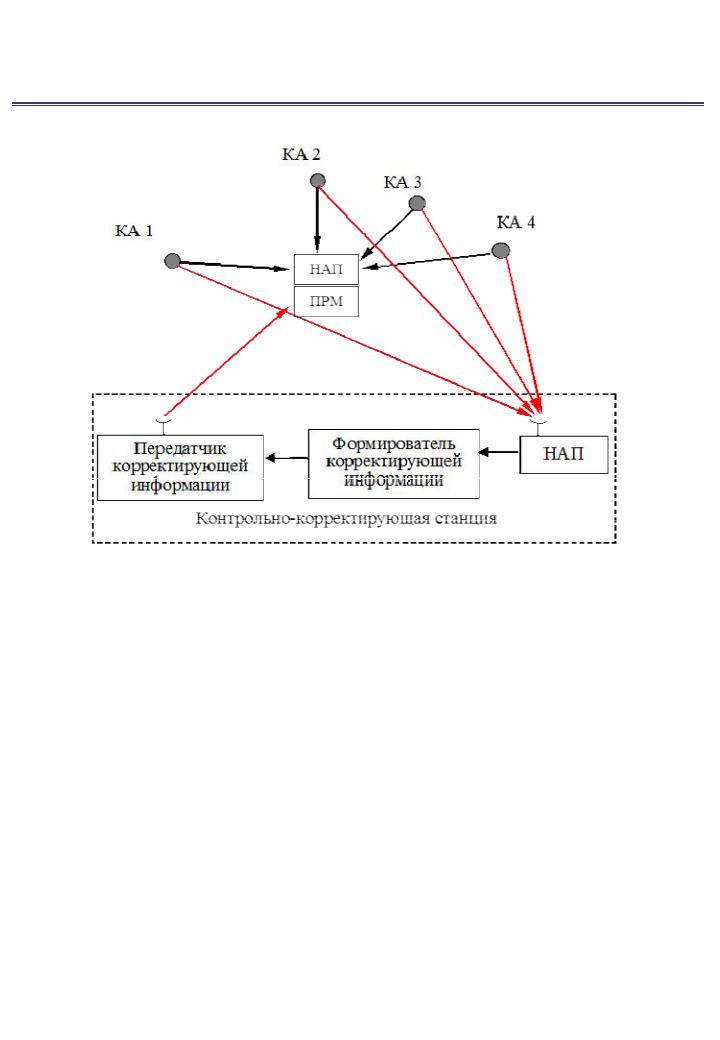
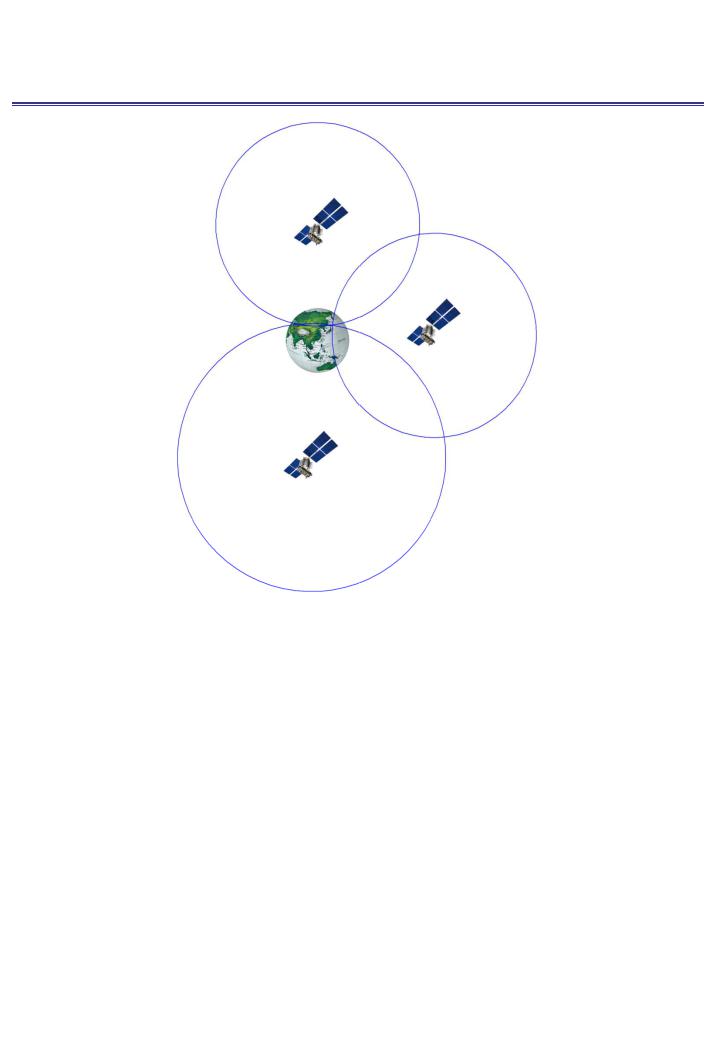
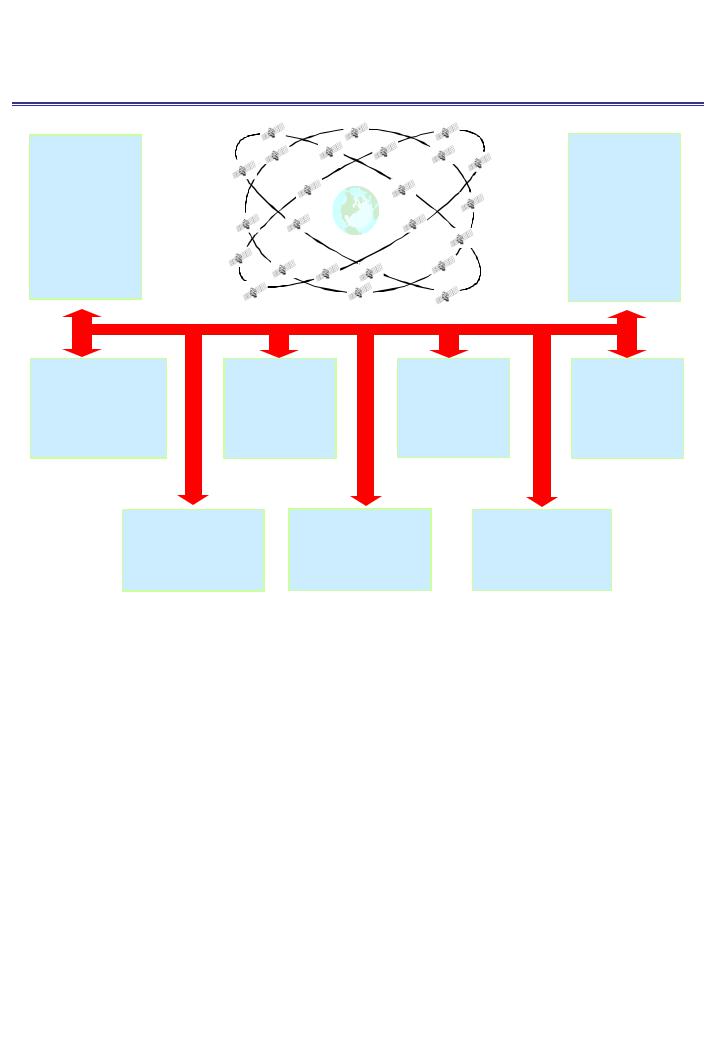
Дифференциальное дополнения космических навигационных систем
Дифференциальное дополнение навигационных систем заключается в использовании сети наземных пунктов с заранее известнными координатами для установки на них аппаратуры потребителя навигационного сиигнала и периодической проверке точности навигационных определений, с формированием корректирующей информации. Эта информация (по сути – информация о погрешности навигационной системы) закладывается на борт геостационарных КА, входящих в систему дифференциального дополнения космических навигационных систем, и впосследствии сообщается потребителю в виде навигационного сигнала.
Таким образом, дифференциальное дополнение включает в себя два сегмента:
наземный сегмент – сеть наземных станций с заранее известными координатами,
оснащёнными аппаратурой потребиителя навигационной информации;
космический сегмент – КА на Г СО (обычно 3 КА, для глобального охвата потребителей), «маскирующиеся» под навигационные КА для того, чтобы аппаратура потребителей не требоввала перенастройки.
7
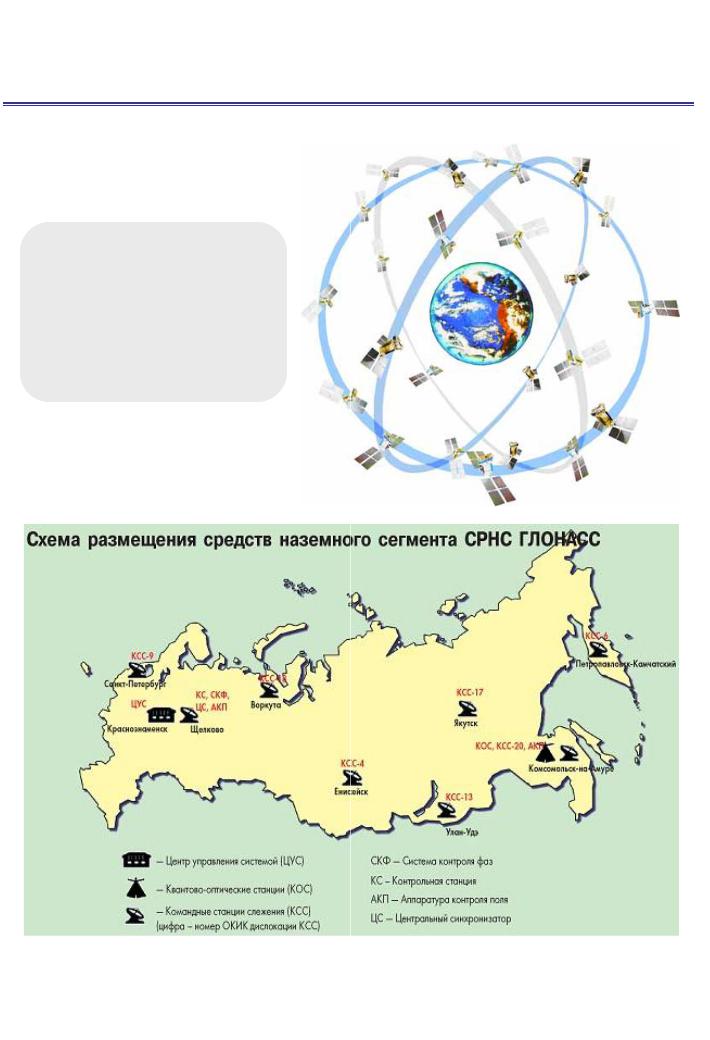
ГЛОН АСС
ГЛОНАСС – ГЛОбальная НАвиггационная Спутниковая Система
Орбитальная группировка:
24 спутника (3 плоскости х 8 спутников)
Тип орбиты: круговая,
H = 19 100 км, i = 64.8°
Период обращения: 11ч. 15мин.
8
Применение ГЛОНАСС
Навигационное
обеспечение МВД,
Навигационное
МЧС,
обеспечение
ФПС,
туристических
оперативных
групп
служб
Навигация |
Применение |
Обеспечение |
Решение задач |
|
в системах |
геолого- |
геодинамики и |
||
всех видов |
||||
поиска и |
разведочных |
прогноз |
||
транспорта |
||||
спасания |
работ |
землетрясений |
||
|
Контроль |
Создание |
Обеспечение |
|
высокоточной |
|||
грузовых |
кадастровых |
||
геодезической |
|||
перевозок |
работ |
||
сети |
|||
|
|
Система ГЛОНАСС применяется для решения различных задач обеспечения деятельности государственных и частных потребителей. Кроме собственно определения параметров движения различных объектов, навигационные данные могут использоваться при кадастровых и геологоразведочных работтах – в этом случае геодезические измерения привязываются к местности с помощью сигналов ГЛОНАСС.
Решение более точных задач, как, напрример, исследование геодинамики и прогноз землетрясений, требует, с одной стороны, привлечения специализированных геодезических космических аппаратов, а с другой – навигационные системы при своей работе используют данные геодезических космических систем. Таким образом, решение научных геодезических задач с помощью навигационных сигналов возможно, но на достаточно длительном временном интервале – статистически обрабатывая множество навигационных измерений можно получить точные геодезические данные без привлечения специализированных геодезических систем.
9
Методы решения навигационной задачи
|
|
где i = 1…4 |
xci , yci , zci |
– |
составляющие координат спутника; |
x , y , z |
– |
составляющие координат потребителя; |
tАi |
– |
задержка сигналаа в атмосфере; |
tсi |
– погрешность временной шкалы КА; |
|
с |
– |
скорость света. |
Определяемыми параметрами являются координаты х, у, z и поправка tп к временной шкале потрребителя.
Остальные параметры сообщщаются потребителю в составе навигационной информации, передаваемой сигналом каждого КА.
Как видно из формулы, на точность навиигационных определений влияет как точность прогнозирования движения навигационных КА по орбите (координаты навигационного КА в любой момент времени), так и точность синхронизации временных шкал навигационных КА и потребителей.
Вектор состояния потребителя представляяет собой классический вектор, определяемый как корень квадратный из суммы квадратов координат, скорректированный поправками на задержку сигнала в атмосфере и на расхождение шкалы времени системы спутников и потребителя.
10