

НИРС Андреев / 140600.68_СДМ.В.2.1_Инжиниринг электроприводов и систем автоматизации.ч3
.pdfa)
б) |
в) |
Рис. 10.3. Экранные копии интерфейса программы оптимизации:
а — переходный процесс по скорости до оптимизации; 6 — переходный процесс по скорости после оптимизации; в — процесс поиска оптимального параметра регулятора
Лекция 11. СИНТЕЗС, ИССЛЕДОВАНИЕ И ОПТИМИЗАЦИЯ ПАРАМЕТРОВ СИСТЕМ РЕГУЛИРОВАНИЯ И УПРАВЛЕНИЯ
2. Исследование и эквивалентирование моделей, описывающих упругие механические связи электроприводов
Литература: Учебное пособие, часть 3, стр. 309-313
1. Исследование и эквивалентирование моделей, описывающих упругие механические связи электроприводов
Механизмы ЭК (бумагоделательных машин, станов непрерывной прокатки металла, линий по производству полимерных материалов и др.) представляют собой многосвязные многомассовые механические подсистемы (ММП), управление которыми осуществляется многодвигательными системами электроприводов.
Чтобы с достаточной точностью отразить динамические свойства системы в заданных полосах частот сепаратных подсистем, необходимо провести анализ и синтез ММП уже на этапе проектирования ЭК, поскольку внесение изменений в готовую конструкцию нерационально.
Методы математического описания и исследования характеристик ММП в общем виде рассматриваются в теории колебаний. Сложность кинематических схем основных функциональных узлов ММП ЭК затрудняет исследование их динамических характеристик. В большинстве случаев можно предположить, что взаимосвязь механической и электромагнитной систем слабая (что объясняется влиянием обратных связей по ЭДС двигателей на динамику СУ). Таким образом. ММП могут рассматриваться независимо от электромагнитных контуров управления. В этом случае входными воздействиями для ММП будут электромагнитные моменты приводных двигателей (если рассматриваются угловые перемещения) или силы (если рассматриваются линейные перемещения), а выходными переменными — координаты движения (скорости, угловые и линейные перемещения) и упругие моменты (силы). В любой ММП существуют также моменты или силы сопротивлений, которые могут быть отнесены к возмущающим воздействиям.
ММП, как и любая механическая система, может быть представлена бесконечным числом материальных точек, упруго связанных между собой. Очевидно, что число степеней свободы такой системы бесконечно велико и точное решение задач о колебаниях подобных механических систем удается получить в замкнутой форме лишь в относительно простых случаях. В общем
виде эту задачу решить невозможно, что вызывает необходимость упрощения расчетной модели ММП.
В этом случае относительно малоинерционные части ММП полагают вовсе лишенными массы и представляют в виде безынерционных элементов (жестких или деформируемых). Примерами таких частей ММП могут служить перемешаемые бумажное полотно или полоса прокатываемого металла. Наиболее жесткие части конструкции (например, направляющие, нажимные валы и др.) принимаются за абсолютно жесткие тела. В этом случае число обобщенных координат ММП будет равно числу ее степеней свободы. Как правило, исследование динамических свойств ММП производится в режиме свободного движения. Для чего сначала к ММП прикладывается импульс силы, а затем при отсутствии внешних возмущений исследуется движение ее к положению равновесия, соответствующему минимуму потенциальной энергии.
Свободное движение для устойчивой ММП всегда является затухающим под влиянием демпфирующих (диссипативных) сил. Однако учет этих сил сильно усложняет исследование динамики ММП, поэтому исследование динамических свойств их моделей проводится для консервативного случая, т.е. при отсутствии рассеянья запасенной в ММП энергии. Учет влияния демпфирующих сил возможен лишь в простых случаях или после эквивалентирования исходной модели ММП. Механическая модель ММП может быть представлена в виде отдельных инерционных звеньев, соединенных упругими связями. Система дифференциальных уравнений, характеризующая свободные колебания консервативной ММП с конечным числом степеней свободы и соответствующая механической модели, является математической моделью ММП.
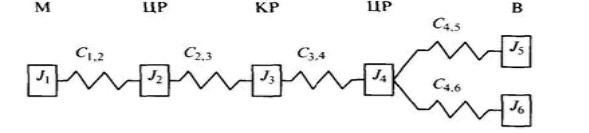
Рис. 6.7. Математическая модель механической подсистемы электроприводов прокатного стана:
М — электродвигатель; ЦP - цилиндрический редуктор; КР — конический редуктор; В — валы клети

Рассмотрим определение собственных частот колебаний механической подсистемы на примере электропривода клети прокатного стана 250 (см. рис. 1.4). Математические модели механической подсистемы электроприводов для 1, 3, 5, 7 клетей его черновой группы одинаковые (рис. 6.7).
Исходные данные для расчета клети 1: J1 = 105000 кг. м2; J2 = 110000
кг.м2; J3= 90 кг.м2; J4 = 20 кг. м2; J5 = 100 кг.м2; J6 = 100 кг.м2; С1,2 = 2,8.107
Н.м/рад; С2,3 = 5,7.107 Н.м/рад; С3,4 = 8.107 Н.м/рад; С4,5 = 6,4.107 Н.м/рад; C4,6
= = 6,4.107 Н.м/рал.
Механическая подсистема электропривода клети описывается следующей системой уравнений:
Расчеты собственных частот, частот упругих колебаний и собственных векторов производим с помощью математического пакета MATLAB.
Из приведенной системы уравнений, используя методику, изложенную в [8], получим матрицу G1 для расчета собственных частот:

В MATLAB для решения задачи нахождения собственных значений матрицы применяется функция eig. Существует несколько способов обращения к этой функции: Lam = cig(A) — столбец Lam заполняется собственными числами матрицы A; [V,D] = eig(A) — диагональная матрица D содержит собственные числа; столбцы матрицы V содержат нормированные собственные векторы для каждого собственного числа. При этом векторы нормированы таким образом, что норма каждого из них равна единице.
Приведем результаты расчета собственных значений и частот колебаний:
При параметрическом синтезе сепаратных систем управления взаимосвязанных ЭП, как правило, подлежат учету лишь те частоты свободных колебаний ММП, которые деформируют частотные характеристики этих систем в зоне существенных частот. При инженерных расчетах достаточно учесть дветри частоты колебаний ММП, наиболее существенно влияющих на динамику работы систем управления. Для упрощения ММП производится ее эквивалентирование двух-или трехмассовой механической системой [23, 53].
Методика эквивалентирования, позволяющая сохранить как суммарный момент инерции (массу) ММП, так и точные значения интересующих частот свободных колебаний исходной ММП. основана на разделении главных координат исходной подсистемы на «медленные» и «быстрые» и исключении последних.
Для решения задачи эквивалентирования можно использовать алгоритм или функцию fsolve(fun, x0, options, P1, P2,…), входящую в ToolBox Optimization MATLAB.
Лекция 12 МОДЕЛИРОВАНИЕ И ИССЛЕДОВАНИЕ РАЗЛИЧНЫХ РЕЖИМОВ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
4.Типовые режимы управления электроприводами машин и комплексов
5.Компьютерное моделирование режимов работы машин и комплексов
6.Примеры моделирование и исследования технологических процессов
3.1Пример 1 Движение кабины лифта
3.2Пример 2 Исследование системы управления ножницами и катящимся резом
Литература: Учебное пособие, часть 3, стр. 313-327
1.Типовые режимы управления электроприводами машин и комплексов.
К типовым режимам управления электроприводами машин и комплексов относятся [8]: стабилизация, слежение, позиционирование, программное управление, синхронизация скоростей и положений, управление нагрузкой
Разнообразие режимов работы электроприводов обусловлено различными режимами работы промышленных установок в технологическом процессе. Наиболее характерным является режим длительной работы электроприводов
в установках с непрерывным технологическим процессом, т.е. непрерывных прокатных станах, бумагоделательных машинах, установках для производства полимерных материалов, кордных тканей и др. Как правило, такие промышленные установки являются многодвигательными и содержат от нескольких единиц до нескольких десятков электроприводов.
Режимы работы машин и комплексов могут быть кратковременными с программным управлением скоростью в широких пределах. Стабилизация скорости в таких случаях является частным режимом на небольших временных интервалах, что характерно для электроприводов ряда металлообрабатывающих станков и реверсивных прокатных станов.
При длительных непрерывных режимах работы машин и комплексов особых требовании к режиму пуска электроприводов не предъявляется. Режим пуска здесь является вспомогательным, так как машины и комплексы проектируются исходя в основном из условий обеспечения заданной точности стабилизации скорости в установившемся режиме.
2.Компьютерное моделирования режимов работы машин и комплексов.
Всовременных системах управления электроприводами в качестве регуляторов используются модули КП.
При программной реализации регуляторов предусматривается анализ уровней заданных сигналов и ошибок систем, границ допустимых значений переменных, коррекция ограничений и другие дополнительные функции обеспечивающие заданные или предельно достижимые динамические свойства систем.
Позиционные режимы с прямоугольными временными диаграммами ускорении, обеспечивающие наибольшее быстродействие, неоптимальны по электропотреблению [7] и. самое главное, являются возбудителями полигармонических колебаний механизмов и источником дополнительных погрешностей движения исполнительных органов. Поэтому при обработке заданных перемещении используют алгоритмы формирования треугольных, трапеции дальных или гармонических временных диаграмм ускорений. При этом некоторая потеря быстродействия систем принципиального значения не имеет.
Применительно к линейным перемещениям на рис. 12.1. а, б показаны прямоугольные временные диаграммы ускорений а(t), а также диаграммы
скоростей v(t) и перемещений s(t) для режимов малых и больших
позиционирований механизмов, а на рис. 6.8, в. г — треугольные (при усилии сопротивления, равном 0).
Доминирующее применение частотно-регулируемых электроприводов с асинхронным короткозамкнутым двигателем при разработке технологического оборудования позволяет реализовывать их различные режимы работы. Преобразователь частоты совместно с модулями управления представляет собой интеллектуальный блок управления приводом, свойства которого довольно разнообразны.
Во многих преобразователях (Altivar ATV-66. FR-A500 и др.) предусмотрена возможность реализации законов управления с различными тинами ускорения и торможения, например линейного (см. рис. 12.1, а, б) и S- образного (рис. 12.2, а).
Например, S-образная характеристика А (рис. 12.2, а) применяется при разгоне/торможении двигателей шпинделей станков, работающих обычно на номинальной скорости вращения (50 Гц и выше). В этом случае номинальная частота является конечной точкой кривой разгона. Приведенная S-образная характеристика В обеспечивает требуемый момент трогания и предотвращение

Рис. 12.1. Временные диаграммы ускорений a(t), скоростей v(t) и перемещения s(t):
а, б — прямоугольные соответственно для режимов малых и больших позиционирований механизмов; в. г — треугольные соответственно для режимов малых и больших позиционирований механизмов при усилии сопротивления, равном нулю

Рис. 12.2. Законы управления с различными типами ускорения и торможения: а — S-образный; б — вида U/f; в — функция, позволяющая вырезать из рабочего диапазона резонансные частоты; г — в зависимости oт типа нагрузки